Конструкция хвостового оперения
Хвостовое оперение стреловидное, Т-образной конструкции, состоит из киля (вертикального оперения) и стабилизатора (горизонтального оперения); пилоты могут изменять угол установки стабилизатора. Стреловидность вертикального и горизонтального оперения превышает стреловидность крыла для того, чтобы несущие характеристики хвостового оперения с увеличением числа М не ухудшались бы быстрее, чем характеристики крыла; б`ольшая стреловидность вертикального оперения целесообразна также и потому, что при этом увеличивается эффективность горизонтального оперения (ГО) из-за увеличения плеча между ЦМ самолета и ЦД ГО.
Профиль горизонтального и вертикального оперения симметричный, что позволяет сохранить одинаковый характер аэродинамических нагрузок при отклонении рулей в разные стороны и имеет меньшее сопротивление. Впереди киля установлен форкиль. Киль и стабилизатор кессонной конструкции (с работающей обшивкой) имеют по три лонжерона; в продольный набор входят также стрингеры, в поперечный - нервюры (рис. 2.13). Киль имеет большую толщину, чем стабилизатор, т.к. его прочность должна быть выше, чем стабилизатора: стабилизатор крепится к концевой части киля и передает нагрузки, возникающие на стабилизаторе, через киль на фюзеляж.
К заднему лонжерону киля крепятся узлы 3, шарнирно соединяющие его со стабилизатором; на среднем лонжероне киля закреплена направляющая балка-рельс 1, которая является промежуточной опорой стабилизатора; на стабилизаторе имеется по две пары роликов, перекатывающихся по балке-рельсу. На переднем лонжероне киля установлен привод (мотор) стабилизатора, изменяющий углы его установки в пределах -1,5°…-7° по отношению к строительной горизонтали фюзеляжа (или в пределах 0°…-5,5° по указателю положения стабилизатора).
Верхняя часть киля и стабилизатор имеют воздушно-тепловую противообледенительную защиту.
Руль направления однолонжеронной конструкции с сотовым заполнителем хвостовой части для увеличения жесткости руля и снижения его массы; крепится к килю с помощью четырех кронштейнов 4. Руль направления имеет аэродинамическую компенсацию (ось вращения руля удалена назад от его носка для уменьшения шарнирного момента) и весовую балансировку (в носке руля помещен балансировочный груз для того, чтобы центры масс сечений руля совпадали с осью его вращения) для предотвращения изгибно-рулевого флаттера. Вращение руля производится гидравлическим рулевым приводом (необратимым гидроусилителем), установленным на заднем лонжероне киля.
Стабилизатор состоит из центроплана и двух отъемных частей, соединенных накладками, по конструкции аналогичен килю. На заднем лонжероне стабилизатора установлены ответные узлы для его шарнирного соединения с аналогичными (ушковыми) узлами на киле; на среднем лонжероне закреплены по две пары роликов, опирающиеся на балку-рельс киля. На переднем лонжероне стабилизатора шарнирно закреплен винт, который перемещается вверх—вниз по гайке; гайка закреплена на редукторе, который получает вращение от двух электромоторов, установленных на переднем лонжероне киля.
Основные геометрические данные оперения
Горизонтальное оперение:
Размах стабилизатора, м 13,4
Площадь, м2 32,09
Стреловидность (по линии 1/4 хорд) 40°
Площадь руля высоты, м2 2 х 4,23
Вертикальное оперение:
Высота киля, м 5,65
Площадь, м2 24,255
Стреловидность (по линии 1/4 хорд) 45°
Площадь руля направления, м2 7,535
СИСТЕМЫ УПРАВЛЕНИЯ
Системы управления включают:
1. Системы основного управления самолетом: продольного, путевого и поперечного управления.
2. Систему управления стабилизатором.
3. Системы управления механизацией крыла.
Управление двигателями и другими самолетными системами рассматривается в соответствующих разделах.
Системы основного управления
Электрогидромеханический комплекс основного управления работает в следующих режимах:
1. Режим штурвального управления, при котором управление самолетом производится обычным перемещением командных рычагов при работе комплекса автоматов бортовой системы управления (АБСУ-154).
2. Режим полуавтоматического управления, когда пилот управляет самолетом по показаниям стрелок командно-пилотажных приборов при одновременной работе АБСУ-154.
3. Режим автоматического управления, при котором самолетом управляет АБСУ-154 совместно с пилотажно-навигационным комплексом.
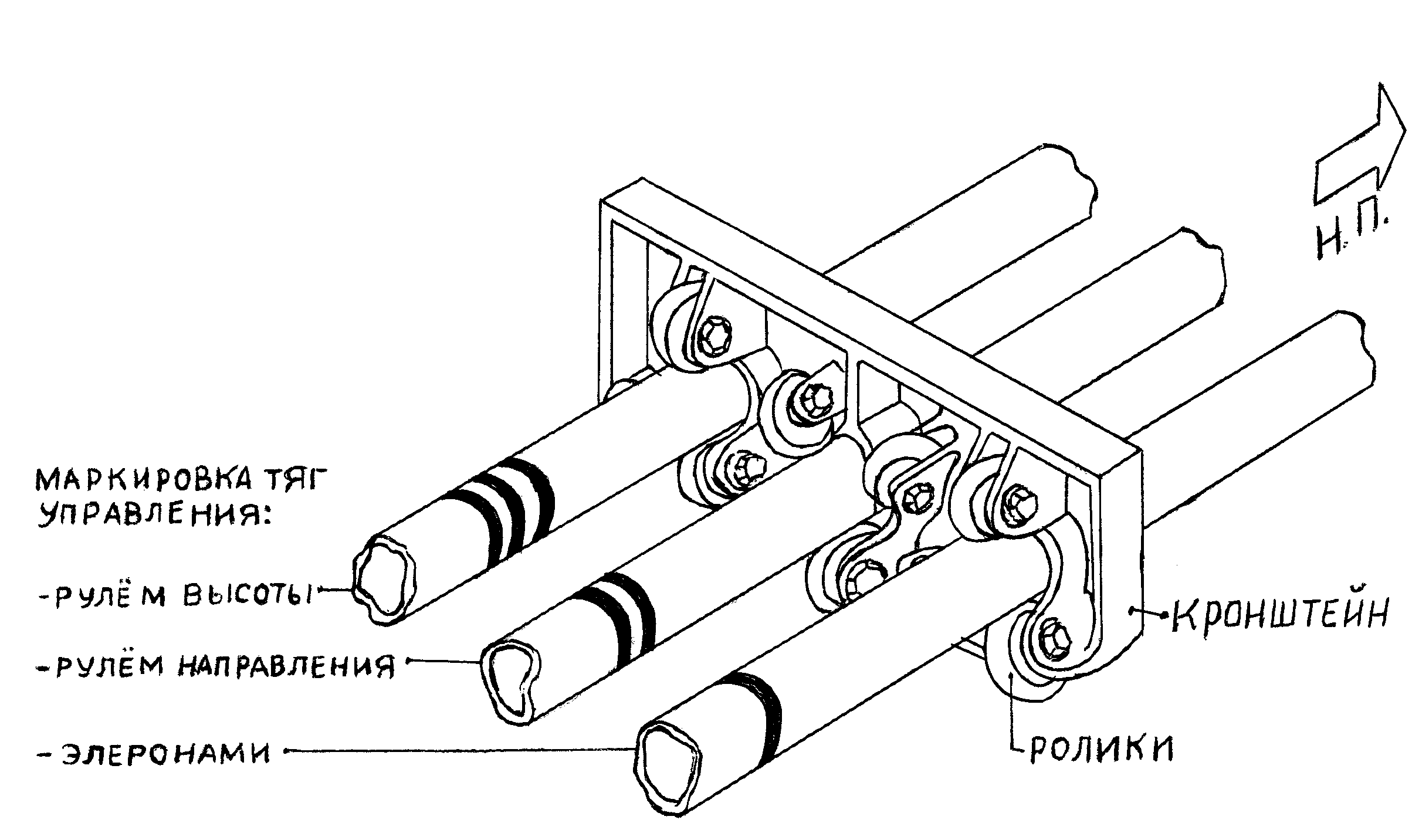
| Рис. 5.1. Роликовые направляющие тяг. |

| Рис. 5.2. Типовое соединение тяг с нелегурируемыми вильчатыми наконечниками. |
Управляющие движения на входные качалки рулевых приводов поступают от:
- командных рычагов, управляемых пилотами;
- рулевых агрегатов РА–56 В–1, параллельно подключенных к каждой цепи управления (установлены перед рулевыми приводами), работающих от сигналов АБСУ. Применение гидроусилителей позволило использовать автоматические системы управления, получить требуемые характеристики устойчивости и управляемости самолетом, упростить технику пилотирования.
ШАССИ
Дата добавления: 2018-09-20; просмотров: 828; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!