Лемма о параллельном переносе силы
Лемма.Механическое состояние твердого тела не нарушится, если данную силу перенести параллельно первоначальному положению в про-
36
|
|

|
|
извольную точку тела, добавив при этом пару, момент которой равен моменту данной силы относительно новой точки приложения.
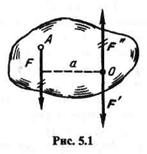
Возьмем тело, находящееся под действием некоторой системы сил, в числе которых есть сила F, приложенная в точке А (рис. 5.1). Выберем произвольную точку О,которую назовем центром приведения, и на основании аксиомы IV приложим в этой точке две равные силы F' и F", параллельные данной силе F, причем
|
|

Систему сил (F, F', F"), эквивалентную силе F, представим как силу F, перенесенную параллельно первоначальному положению в произвольно выбранный центр приведения О,и пару (F, F"), момент которой равен моменту данной силы относительно центра приведения О,являющегося новой точкой приложения силы:

Лемма доказана.
Описанный выше перенос силы можно показать на примере. Рассмотрим колесо А радиуса г, вращающееся на оси в подшипниках (рис. 5.2). Пусть к ободу колеса по касательной приложена сила F (такую силу называют окружной).
Для определения действия силы F на колесо и подшипники применим доказанную лемму и перенесем эту силу параллельно самой себе на ось колеса. В результате получим силу F' = F, вызывающую давление на подшипники, и пару сил (F, F") с моментом, равным Fr, которая будет вращать колесо.
Приведение плоской системы
Произвольно расположенных сил к данному центру
Приведением системы сил называется замена ее другой системой, эквивалентной первой, но более простой.
37
|
|
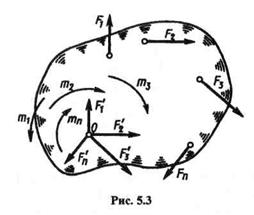
Теорема.Плоская система произвольно расположенных сил в общем случае эквивалентна одной силе, приложенной в центре приведения, и одной паре.
Пусть дана плоская система п произвольно расположенных сил (F1, F2, F3, ..., Fп-1, Fп). Перенесем параллельно все силы в произвольно выбранный в плоскости действия сил центр приведения О, добавив при этом п пар (рис. 5.3). Моменты этих пар т1, т2, т3, ..., тп,равны моментам данных сил относительно центра приведения О.
Вместо заданной системы п произвольно расположенных сил мы получили систему и сил, приложенных в центре приведения, равных данным силам по модулю и одинаковых с ними по направлению, и систему п присоединенных пар:

Эта новая система эквивалентна данной.
Плоская система сил, приложенных в одной точке, эквивалентна одной силе, которая равна векторной сумме этих сил и приложена в той же точке, следовательно,
|
|

|
|

или
Эту силу назовем главным вектором данной системы. Главный вектор плоской системы произвольно расположенных сил равен векторной сумме всех сил системы и приложен в центре приведения.
Графически главный вектор выражается замыкающей стороной силового многоугольника, построенного на данных силах. Аналитически модуль главного вектора можно вычислить по формуле
а направляющий косинус — по формуле
38
|
|

Плоская система пар эквивалентна одной паре, момент которой равен алгебраической сумме моментов данных пар, следовательно,
|
|

|
|
или
Эту пару с моментом Мглназовем главным моментом заданной системы сил.
Главный момент плоской системы произвольно расположенных сил равен алгебраической сумме моментов всех сил системы относительно центра приведения.
Таким образом, всякая плоская система сил в общем случае эквивалентна системе, состоящей из силы и пары сил, следовательно, теорема доказана.
Не следует считать, что главный вектор и главный момент имеют чисто формальное значение, введенное для удобства доказательства, и что их можно найти только с помощью вычислений. Нередко отдельно действующие на тело силы определить трудно или невозможно, а главный вектор или главный момент этих сил найти сравнительно легко. Так, например, число точек контакта и модули сил трения между вращающимся валом и подшипником скольжения, как правило, неизвестны, но главный момент этих сил можно определить простым измерением; второй пример: в характеристику электродвигателя входит не сила, с которой статор действует на ротор, а вращающий момент.
Свойства главного вектора
И главного момента
Свойства главного вектора и главного момента заключаются в следующем:
1) модуль и направление главного вектора данной системы не зависят от выбора центра приведения, так как при любом центре приведения силовой многоугольник, построенный на данных силах, будет один и тот же;
2) величина и знак главного момента в общем случае зависят от выбора центра приведения (кроме одного случая, о котором будет сказано в § 5.4), так как при перемене центра приведения меняются плечи сил, а модули их остаются неизменными;
39
|
|
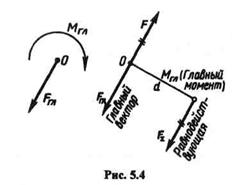
3) главный вектор и равнодействующая системы сил векторно равны, но в общем случае не эквивалентны. Пусть известны главный вектор Fгл и главный момент Мгл какой-то плоской системы сил (рис.5.4).Определим равнодействующую этой системы.
Пользуясь известным свойством пары сил, преобразуем главный момент Мглтак, чтобы
силы пары F и F  - были параллельны и по модулю равны главному вектору F гл:
- были параллельны и по модулю равны главному вектору F гл:

причем сила F приложена к точке О противоположно F гл.
Далее систему (F гл, F), как взаимно уравновешенную, отбросим:

В результате получили одну силу F эквивалентную главному вектору и главному моменту, т. е. равнодействующую системы, причем

Модуль равнодействующей

а положение линии действия равнодействующей определяется плечом d по формуле

В результате можно считать установленным, что главный вектор и равнодействующая векторно равны, но не эквивалентны;
4) главный вектор и равнодействующая эквивалентны лишь в частном случае, когда главный момент системы равен нулю; последнее возможно в случае, когда центр приведения находится на линии действия равнодействующей.
Из рис 5.4 видно, что момент равнодействующей F - относительно
центра приведения О равен моменту Мгл пары (F , F), т. е. главному моменту данной системы:
40
|
|

Так как Мгл =  M0(Fi), а за центр приведения можно взять любую точку плоскости действия сил данной системы, то всегда имеем
M0(Fi), а за центр приведения можно взять любую точку плоскости действия сил данной системы, то всегда имеем
|
|
Полученная формула является математическим выражением теоремы о моменте равнодействующей.
Теорема.Момент равнодействующей силы относительно какой-либо точки, расположенной в плоскости действия сил, равен алгебраической сумме моментов составляющих сил относительно той же точки.
Теорему о моменте равнодействующей впервые доказал французский ученый Вариньон (1654—1722), поэтому ее называют теоремой Вариньона.
Применим доказанную теорему для определения положения линии действия равнодействующей F  плоской системы п параллельных сил:
плоской системы п параллельных сил:
|
|

Выберем какую-либо точку О плоскости действия сил за центр моментов и согласно теореме Вариньона запишем

где d —плечо равнодействующей F относительно точки О.
Из последнего равенства определяем плечо d:
 |
так как, согласно § 3.2,
 Чтобы установить, в какую сторону от точки О следует на перпендикуляре к линиям действия сил отложить плечо d, следует учесть, во-первых, направление вектора F и, во-вторых, знак
Чтобы установить, в какую сторону от точки О следует на перпендикуляре к линиям действия сил отложить плечо d, следует учесть, во-первых, направление вектора F и, во-вторых, знак
Различные случаи приведения
Дата добавления: 2018-04-15; просмотров: 909; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!