ОСНОВНЫЕ ПОЛОЖЕНИЯ И АКСИОМЫ СТАТИКИ
А.А. ЭРДЕДИ
Н.А. ЭРДЕДИ
________________________________
ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
СОПРОТИВАЕНИЕ МАТЕРИАЛОВ
Издание четвертое,
Переработанное и дополненное
Допущено Министерством образования
Российской Федерации в качестве учебного пособия
для студентов учреждений среднего профессионального
образования, обучающихся
по машиностроительным специальностям
Москва
«Высшая школа» 2002
УДК 621.01 ББК 30.12
Э 75
Рецензент— В.К. Житков — преподаватель
Государственного образовательного учреждения
«Мытищинский машиностроительный техникум-предприятие»
Эрдеди, А.А.
Э 75 Теоретическая механика. Сопротивление материалов: Учеб. пособие для машиностр. спец. сред. проф. учеб. заведений/А.А. Эрдеди, Н.А. Эрдеди. — 4-е изд., перераб. и доп. — М.: Высш. шк., 2002.— 318 с: ил.
ISBN 5-06-003807-6
В пособии изложены с применением высшей математики основы теоретической механики и сопротивления материалов, а также даны элементарные сведения из теории механизмов и машин. Приведены подробно решенные примеры (3-е изд. —1991 г.).
Для студентов машиностроительных специальностей средних профессиональных учебных заведений и колледжей.
УДК 621.01 ББК 30.12
ISBN 5-06-003807-6 © ФГУП«Издательство«Высшая школа», 2002
Оригинал-макет данного издания является собственностью издательства «Высшая школа», и его репродуцирование (воспроизведение) любым способом без согласия издательства запрещается.
Предисловие
В пособии изложены основы теоретической механики, сопротивления материалов, элементарные сведения из теории механизмов и машин (части I, II). Изложение ведется с применением высшей математики. Применяется правая система координат и соответствующее ей правило знаков для моментов сил и пар.
В учебнике рассмотрены все вопросы, предусмотренные программой для машиностроительных специальностей учреждений среднего профессионального образования.
Пособие приведено в соответствие с существующими стандартами, а буквенные обозначения физических величин соответствуют Международному стандарту и рекомендации ИСО.
В целях усиления практической направленности изложения предметов учебник содержит два параграфа, а именно: «Некоторые сведения о механизмах» и «Понятие о промышленных роботах».
Для интенсификации и активизации учебного процесса в книге помещены два приложения: «Домашние расчетно-графические задания по технической механике. Содержание, оформление и методика проведения» и «Программированные тренировочные карточки для подготовки к контрольным работам по технической механике».
Авторы
Часть I
ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
Введение
Механика — это наука о механическом движении и взаимодействии материальных тел. Теоретическая механика — это раздел механики, в котором изучаются законы движения тел и общие свойства этих движений.
Механическое движение — это изменение с течением времени взаимного положения в пространстве материальных тел или взаимного положения частей данного тела. Покой есть частный случай механического движения, причем понятия покоя и механического движения являются относительными. Так, человек, сидящий в вагоне равномерно и прямолинейно движущегося поезда, может считать себя находящимся в покое по отношению к вагону, но по отношению к Земле он будет находиться в движении.
Другие формы движения материи заключают в себе механическое движение, но не могут быть объяснены одними законами механики и являются объектом изучения других наук, например химии, биологии и т. д.
Механика является одной из самых древних наук. Термин «механика» введен выдающимся философом древности Аристотелем (384—322 до н. э.). Первые научные основы учения о равновесии тел содержатся в трудах Архимеда (287—212 до н. э.). На всех этапах своего развития механика была тесно связана с развитием производительных сил общества и способствовала техническому прогрессу.
В развитие механики значительный вклад внесли многие отечественные ученые, в том числе «отец русской авиации» Н. Е. Жуковский (1847—1921), автор известного в свое время учебника по теоретической механике; И. В. Мещерский (1859—1935), заложивший основы механики тел переменной массы, его задачник по теоретической механике переиздается и в наши дни.
Ученым-механикам принадлежит честь решения таких проблем, как запуск первого искусственного спутника Земли, фотографирование обратной стороны Луны, первые полеты человека в космическое пространство и высадка людей на поверхности Луны, которую осуществили аме-
4
риканские астронавты. Здесь следует отметить замечательного русского ученого и изобретателя К. Э. Циолковского (1857— 1935), заложившего основы теории реактивного движения и космических полетов. Мечта людей о покорении космоса стала реальностью в результате деятельности выдающегося ученого академика СП. Королева (1906— 1966) — генерального конструктора космических кораблей «Восток» и «Восход». Первым человеком, летавшим в космос 12 апреля 1961 г., был Ю.А. Гагарин (1934 — 1968). В наши дни полеты в космическое пространство совершаются регулярно.
Достижения ученых в области механики дают возможность решать сложные практические проблемы в области техники и способствуют развитию фундаментальных наук, к числу которых относится механика.
По словам известного ученого-механика академика А. Ю. Ишлинского, механика имеет отношение ко всем явлениям природы и творениям техники, ко всем естественным научным дисциплинам. По существу, ни одно явление природы не может быть в должной мере понято без уяснения его механической стороны, и ни одно творение техники нельзя создать, не принимая в расчет те или иные механические закономерности. В этом, разумеется, нет ничего удивительного, так как любое явление в окружающем нас макромире связано с движением, следовательно, не может не иметь того или иного отношения к механике.
В I части книги изложены основы теоретической механики, базирующейся на законах Ньютона и называемой классической механикой в отличие от механики теории относительности (релятивистской механики), основанной на теории относительности Эйнштейна, и квантовой механики, которой подчиняется движение тел атомных размеров.
Теоретическая механика состоит из трех разделов: статики, кинематики и динамики.
Раздел первый
СТАТИКА
Глава 1
ОСНОВНЫЕ ПОЛОЖЕНИЯ И АКСИОМЫ СТАТИКИ
Основные понятия статики
Статика есть часть теоретической механики, изучающая условия, при которых тело находится в равновесии. Равновесием будем считать такое состояние, когда тело находится в покое или движется прямолинейно и равномерно.
Тело называют абсолютно твердым (или абсолютно жестким), если расстояние между любыми его точками не меняется при действии на него других тел. Абсолютно твердых тел в природе нет, но во многих случаях изменения формы и размеров (деформации) тел настолько незначительны, что ими можно пренебречь. В теоретической механике полагают тела абсолютно твердыми и физико-механические свойства их не учитывают (за исключением вопросов, связанных с трением).
Материальной точкой называется точка, имеющая массу. Материальной точкой мы будем считать не только тело, имеющее очень малые размеры, но и любое тело, размерами которого в условиях данной задачи можно пренебречь. Например, в астрономии звезды рассматривают как материальные точки, так как размеры звезд малы по сравнению с расстояниями между ними. Одно и то же реальное тело в зависимости от постановки задачи может рассматриваться либо как материальная точка, либо как тело, размеры которого необходимо учесть. Всякое тело можно полагать взаимосвязанной совокупностью (системой) материальных точек. Абсолютно твердое тело представляет собой неизменяемую систему материальных точек.
Тело называется свободным, если никакие другие тела не препятствуют его перемещению в любом направлении, в противном случае тело называется несвободным или связанным. Пример свободного тела — воздушный шар в полете. Большинство окружающих нас тел являются несвободными телами.
Тела в природе различным образом взаимодействуют между собой или с окружающей их средой. Механическое взаимодействие тел, т. е.
6
взаимодействие, влияющее на их состояние покоя или движения (механическое состояние), характеризуется силой.
Сила есть мера механического взаимодействия тел.Сила характеризуется тремя элементами: числовым значением, направлением и точкой приложения. Таким образом, сила — величина векторная. Числовое значение силы называется модулем вектора силы. Направление силы есть направление того движения, которое получила бы покоящаяся свободная материальная точка под действием этой силы. Прямая линия, по которой направлен вектор силы, называется л и н и е й действия силы.
Как известно из физики, Международная система единиц (СИ) в качестве единицы силы устанавливает ньютон (Н).
Ньютон есть сила, сообщающая телу массой 1 кг ускорение 1 м/с2 в направлении действия силы.
Кратные и дольные единицы силы образуются путем умножения или деления основной единицы на степень числа 10. Согласно ГОСТу, их названия образуются прибавлением десятичных приставок:
мега (М).................. 106 деци (д).................. 10 -1
кило (к)................... 10 3 санти (с)................ 10 -2
гекто (г)................... 10 2 милли (м).............. 10 -3
дека (да).................. 10 микро (мк)............. 10-6
Например, килоньютон (кН) = 103 Н, меганьютон (МН) = 106 Н, миллиньютон (мН)=10-3Н.
|
|
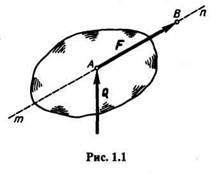
Графически силу изображают отрезком прямой со стрелкой; длина отрезка в определенном масштабе равна модулю вектора силы (рис. 1.1). Масштаб силы показывает, сколько единиц модуля силы содержится в единице длины ее вектора. Единица масштаба силы, например,  = Н/мм или Н/см.
= Н/мм или Н/см.
На рис. 1.1 изображена сила, приложенная в точке А и действующая по линии тп.Вектор силы обозначим прописной латинской жирной буквой F, а модуль силы — той же буквой, но светлой F*.Для вектора силы F точка А
* В некоторых книгах векторы обозначают светлыми латинскими буквами со стрелочкой (или черточкой) над ними, а модули — той же буквой без стрелочки. Этот способ следует применять при написании векторных равенств на классной доске.
7
будет называться началом, а точка В — концом вектора. Нередко удобно изображать вектор силы так, чтобы стрелка, стоящая в конце вектора, упиралась в точку приложения силы (сила Q на рис. 1.1).
Совокупность тел (в том числе материальных точек), каким-то образом связанных между собой, назовем системой тел. Силы взаимодействия между телами, входящими в данную систему, называют внутренними, а силы, с которыми действуют на данную систему другие тела, — внешними. Если данную систему рассечь на части и рассматривать равновесие каждой части в отдельности, то внутренние для всей системы силы, действующие в сечениях, станут внешними силами для соответствующих частей системы. Такой метод позволяет определить внутренние силы, действующие в сечениях, и называется методом сечений. В технической механике он применяется весьма широко. Следует заметить, что деление сил на внешние и внутренние условно и зависит от постановки задачи и даже метода ее решения.
Основные аксиомы статики
Условия, при которых тело может находиться в равновесии, выводятся из нескольких основных положений, принимаемых без доказательств, но подтвержденных опытом и называемых аксиомами статики. Основные аксиомы статики сформулированы английским ученым Ньютоном (1642—1727) и поэтому названы его именем.
Аксиома I (аксиома инерции, или первый закон Ньютона).
Всякое тело сохраняет свое состояние покоя или прямолинейного равномерного движения, пока какие-нибудь силы не выведут тело из этого состояния.
Способность материального тела сохранять движение при отсутствии действующих сил или в постепенном изменении этого движения, когда на тело начинают действовать силы, называется инерцией или инертностью. Инертность есть одно из основных свойств материи.
На основании этой аксиомы состоянием равновесия считаем такое состояние, когда тело находится в покое или движется прямолинейно и равномерно, т. е. по инерции.
Аксиома П(аксиома взаимодействия, или третий закон Ньютона).
Силы взаимодействия между собой двух тел всегда равны по модулю и направлены по одной прямой в противоположные стороны.
8
Из третьего закона Ньютона вытекает, что одностороннего механического действия одного тела на другое не существует, т. е. все силы природы — силы парные.
Совокупность сил, приложенных к данному телу (или системе тел), называется системой сил. Сила действия какого-либо тела на данное и сила противодействия не представляют собой систему сил, так как они приложены к различным телам.
Если какая-нибудь система сил обладает таким свойством, что после приложения к свободному телу она не изменяет его механическое состояние, то такая система сил называется уравновешенной.
Аксиома III(у с л о в и е равновесия двух сил).
Для равновесия свободного твердого тела, находящегося под действием двух сил, необходимо и достаточно, чтобы эти силы были равны по модулю и действовали по одной прямой в противоположные стороны.
Условие, сформулированное в этой аксиоме, является необходимым для равновесия двух сил. Это значит, что если система двух сил находится в равновесии, то эти силы должны быть равны по модулю и действовать по одной прямой в противоположные стороны.
Условие, сформулированное в этой аксиоме, является достаточным для равновесия двух сил. Это значит, что справедлива обратная формулировка аксиомы, а именно: если две силы равны по модулю идействуют по одной прямой в противоположные стороны, то такая система сил обязательно находится в равновесии.
В дальнейшем мы познакомимся с условием равновесия, которое будет необходимо, но не достаточно для равновесия.
Аксиома IV.
Равновесие (как и любое другое механическое состояние) твердого тела не нарушится, если к нему приложить или удалить систему уравновешенных сил.
Следствие из аксиом III и IV.
|
|
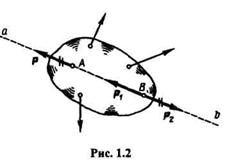
Механическое состояние твердого тела не нарушится от перенесения силы вдоль линии ее действия.
Докажем это следствие. Пусть на твердое тело действует в числе других сила Р, приложенная в точке А,с линией действия аb (рис. 1.2). В произвольно взятой на линии аb точке В приложим две равные по модулю и противоположно направленные силы Р1 и Р2, действующие по линии аb.Соглас-
но аксиоме III, силы P1 и Р2 взаимно уравновешены, а на основании аксиомы IV их можно приложить к телу, не нарушая механического состояния. Подберем силы P1 и Р2 такими, чтобы они по модулю были равны силе Р:

На основании аксиомы IV отбросим силы Р1 и Р2, как взаимно уравновешенные. Тогда оставшуюся силу Р1 можно рассматривать как силу Р, перенесенную из точки А в точку В по линии действия, причем механическое состояние не нарушается. Следствие доказано.
Подчеркнем, что перенос силы вдоль линии ее действия можно осуществлять лишь в том случае, если рассматриваемое тело абсолютно твердое.
Две различные системы сил принято считать эквивалентными, если одну из них можно заменить другой, не нарушая механического состояния свободного твердого тела.
Следует заметить, что эквивалентные системы сил могут вызывать различные деформации нетвердого тела.
На рис. 1.3 изображены две системы сил, порознь действующие на один и тот же стержень АВ,причем P1 = P2 ,a Q1= Q2 .На основании аксиомы III ясно, что каждая из этих систем не выводит стержень из равновесия, т. е. они эквивалентны. Но система сил (Р1, P2) стремится укоротить стержень, а система сил (Q1, Q2) удлинить его. Эквивалентность систем сил условимся записывать так:
|
|

На основании следствия из аксиом III и IV можно сказать, что две силы эквивалентны,если они равны по модулю и действуют по одной прямой в одну сторону. Два вектора силы (как и два любых однородных по размерности вектора) равны, если они параллельны, одинаково направлены и имеют равные модули.
Одна сила, эквивалентная данной системе сил, называется равнодействующей, а силы этой системы — составляющими этой равнодействующей.
Сила, которая уравновешивает данную систему сил, называется
|
|

уравновешивающей этой системы.
Равнодействующая и уравновешивающая силы одной и той же системы равны по модулю и действуют по одной прямой в противоположные стороны. Равнодей-
|
|

ствующая уравновешенной системы сил равна нулю, иначе говоря, уравновешенная система сил эквивалентна нулю.
АксиомаV(аксиома параллелограмма).
Равнодействующая двух сил, приложенных к телу в одной точке, равна по модулю и совпадает по направлению с диагональю параллелограмма, построенного на данных силах, и приложена в той же точке.
Построение диагонали параллелограмма (рис. 1.4, а),сторонами которого являются заданные векторы, называется векторным или геометрическим сложением. Таким образом, можно сказать, что равнодействующая двух сил, приложенных в одной точке, равна их векторной сумме

и приложена в той же точке.
Равнодействующую двух сил можно найти, построив вместо параллелограмма сил треугольник сил (рис. 1.4, б). Из рис. 1.4, б видно, что порядок сложения векторов на величину равнодействующей не влияет, т. е.
|
|

Модуль и направление равнодействующей двух сил, приложенных в одной точке, можно определить аналитически, для чего рассмотрим треугольник ABC (рис. 1.4, а).
По теореме косинусов

откуда модуль равнодействующей

По теореме синусов
11
откуда найдем направление равнодействующей:
|
|
Рассмотрим частные случаи сложения двух сил:

Равнодействующая двух сил, действующих по одной прямой в одну сторону, равна их сумме и направлена по той же прямой в ту же сторону;

Равнодействующая двух сил, действующих по одной прямой в разные стороны, равна разности этих сил и направлена по той же прямой в сторону большей силы;
|
|

Равнодействующая двух сил, действующих под прямым углом, равна по величине диагонали прямоугольника, построенного на данных силах.
Дата добавления: 2018-04-15; просмотров: 1399; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!