Проекция силы на ось, не лежащую с ней в одной плоскости.
Способ двойного проецирования:
Сначало силу проецируют на плоскость в которой лежит данная ось, затем проекцию силы на плоскости проецируют на данную ось.
Проекция силы на плоскости – это вектор
Угол γ – это угол наклона силы Q по отношению к плоскости Qп
Qx = Qп cos 𝞫
Qп = Q cos γ
Qx = Q cos γ cos 𝞫
Момент силы относительно оси
Момент силы относительно какой либо оси называется величина, характеризующая вращательный эффект данной силы, относительно этой оси.
Моментом силы относительно оси называется величина равная моменту проекции этой силы на плоскость перпендикулярной к данной оси, относительно точки пересечения оси с плоскостью.
Например, чтобы определить момент силы относительно оси Оy, необходимо вектор силы спроецировать на плоскость перпендикулярную этой оси (рис. 11), т.е. на плоскость (xz), затем вычислить момент полученной проекции Fxz относительно центра О . Таким образом,
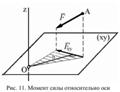
Мz(F) = Мо(Fxz)= ± Fxz ℓ
Правило знаков тоже самое, но смотреть нужно с положительного конца оси.
Момент силы относительно оси будет иметь знак плюс, когда с положительного конца оси поворот, который стремится совершить сила Fxz , виден происходящим против хода часовой стрелки, и знак минус - когда по ходу часовой стрелки.
Момент силы относительно данной оси равен 0
1.Если линия действия силы пересекает ось.
2. Если сила параллельна оси.
3. Если сила лежит на оси.
|
|
|
Момент силы относительно данной оси не изменяется при перемещении силы вдоль её линии действия
Условия равновесия пространственной системы сил.
Произвольной пространственной системой сил - называется система сил, линии действия которых лежат в разных плоскостях и пересекаются в одной точке.
Так же ПССС данную систему сил можно сложить по способу силового многоугольника.
Геометрическое условие равновесия ПССС включает три уравнения равновесия:
ΣFkx= 0, ΣFky= 0, ΣFkz= 0,
Так же как и ПССС можно привести к любой точке пространства (тема 1.4.2)
Порядок приведения тот же в результате получаем главный вектор и главный момент.
Для равенства ПСС необходимо чтобы выполнялись шесть уравнений равновесия:
ΣFkx= 0, ΣFky= 0, ΣFkz= 0,
Σ Mx= 0, Σ My= 0, ΣMz = 0.
Кинематика. Основные понятия кинематики.
Ответ:
Кинематика. Основные понятия кинематики:
Кинематика — это один из разделов механики, который изучает движение тел без выяснения причин этого движения
Основные понятия кинематики:
1. Система отсчета –это некоторая система, жестко связанная с телом, по отношению к которому оцениваются движению данного тела.
2. Время (t0 =0) - это скалярная, независимая и непрерывно изменяющая величину.
|
|
|
3. Начальный момент- это момент времени от которого ведется отсчет.
4. Промежуток времени- это разность между какими-либо двумя последовательными моментами времени.
5. Траектория – это непрерывная линия, которая рисует движущая точка относительно данной системы отсчета.
6. Расстояние- это скалярная величина определяющая положение движущейся точки в любой момент времени на ее траектории, расстояние отсчитывается от некоторого начала отсчета.
7. Пройденный путь — это длина траектории, которую тело пройдет за время t, от начальной точки до конечной.
8. Ускорение —это физическая величина, которая определяется пределом отношения небольшого изменения скорости к небольшому промежутку времени, в течение которого происходило изменение скорости.
9. Движение материальной -точки может быть прямолинейным и криволинейным.
Способы задания движения точки.
Ответ:
Кинематически задать движение точки — значит задать положение этой точки относительно данной системы отсчета в любой момент времени.
Существует два способа:
а) Естественный способ задания движения точки.
Рассмотрим естественный способ задания движения точки, когда отдельно задается:
|
|
|
- траектория движения;
- начало и положительное направление отсчета;
- закон движения точки по траектории: S = S(t)
Управление движения: это управление определяющее положение движущей точки в зависимости от времени.
б) Координатный способ.
Положение любой точки относительно данной системы координат в полне определяется тремя координатами которые изменяются с течением времени т.е должны быть заданы в функции времени.
Х=f1 (t)
У= f2 (t)
Zf3 (t)
Скорость точки.
Ответ:
Скоростью точки -называется векторная величина, характеризующая в данный момент быстроту и направление перемещения точки.
Скорость- это кинематическая мера движения точки.
Если точка движется прямолинейно, то вектор скорости в каждый момент времени направлен по касательной к траектории в сторону движения точки.
В зависимости от изменения скорости движения точки может быть равномерным и неравномерным.
Равномерное движение: это движение точки ,при котором за равные промежутки времени точка проходит равные отрезки пути.
Модуль скорости в этом случае определяется по формуле: V=S/t, м/c
Неравномерное движение: если движение задано естественным способом, то модуль скорости точки в любой момент времени равен первой произвольной от расстояния по времени t.
|
|
|
Ускорение точки.
Ответ:
Ускорение точки - это кинематическая мера движения точки (формула: а, м/c)
Ускорением называется- векторная величина, характеризующая быстроту изменения модуля и направления вектора скорости.
Если точка совершает криволинейное движение, и ее движение задано естественным способом, то вектор полного ускорения точки раскладывают на две взаимно перпендикулярные составляющие.
Составляющий вектор — это касательное ускорение характеризующее быстроту изменения модуля скорости.
Вектор (атау) всегда направлен по касательной к траектории движения точки.
Модуль касательного ускорения в любой момент времени равен первой производной от скорости по времени (t) или второй производной от расстояния.
-Если точка движения ускоренно, то вектор V(атау) направлен ту даже куда и вектор скорости по модулю V.
-Если точка движения замедленно, то вектор Vнаправлен противоположно вектору скорости. По модулю V,в этом случае отрицательное.
Составляющий вектор- называется нормальным ускорением и характеризует быстроту изменения направления вектора скорости.
Направление вектора полного ускорения точки определяют при помощи направляющих косинусов.
(27) cos (a an) = an/a
Дата добавления: 2018-05-09; просмотров: 1738; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!