Теорема о сложении пар сил. Условие равновесия системы пар сил.
Теорема: система пар сил, действующих на абсолютно твёрдое тело в одной плоскости, эквивалентно паре сил с моментом, равным алгебраической сумме моментов пар системы.
Равнодействующая пара - это пара сил, заменяющая действие данных пар сил приложенных к твёрдому телу в одной плоскости.
Условие равновесия системы пар сил: для равновесия плоской системы пар сил необходимо и достаточно, чтобы сумма их моментов была равна 0.
Момент силы относительно точки.
Моментом силы относительно точки называется взятое со знаком "плюс" или "минус" произведение модуля силы на ее плечо относительно данной точки. Плечом силы относительно точки называется длина перпендикуляра, опущенного из данной точки на линию действия силы. Принято следующее правило знаков: момент силы относительно данной точки положителен, если сила стремится вращать тело вокруг этой точки против часовой стрелки, и отрицателен в противоположном случае. Если линия действия силы проходит через некоторую точку, то относительно этой точки плечо силы и ее момент равны нулю. Момент силы относительно точки определяется по формуле .
Св-ва момента силы относительно точки:
1.Момент силы относительно данной точки не меняется при переносе силы вдоль её линии действия, т.к. при этом не изменяется ни модуль силы, ни её плечо.
2.Момент силы относительно данной точки равен нулю, если линия действия силы проходит через эту точку, т.к. в этом случае плечо силы равно нулю: а=0
|
|
|
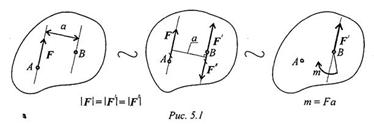
Теорема Пуансо о приведении силы к точке.
Силу можно перенести параллельно линии ее действия, при этом нужно добавить пару сил с моментом, равным произведению модуля силы на расстояние, на которое перенесена сила.
Операция параллельного переноса силы называется приведением силы к точке, а появляющаяся при этом пара - называется присоединённой парой.
 Возможно и обратное действие: силу и пару сил, лежащие в одной плоскости, всегда можно заменить одной силой, равной данной силе, перенесённой параллельно своему начальному направлению в некоторую другую точку.
Возможно и обратное действие: силу и пару сил, лежащие в одной плоскости, всегда можно заменить одной силой, равной данной силе, перенесённой параллельно своему начальному направлению в некоторую другую точку.
Дано: сила в точке А (рис. 5.1).
Добавим в точке В уравновешенную систему сил (F'; F"). Образуется пара сил (F; F").Получим силу в точке В и момент пары m.
Приведение плоской системы произвольно расположенных сил к одному центру. Главный вектор и главный момент системы сил.
Линии действия произвольной системы сил не пересекаются в одной точке, поэтому для оценки состояния тела такую систему следует упростить. Для этого все силы системы переносят в одну произвольно выбранную точку — точку приведения (т.О). Применяют теорему Пуансо. При любом переносе силы в точку, не лежащую на линии ее действия, добавляют пару сил.
|
|
|
Появившиеся при переносе пары называют присоединенными парами.
Полученную в т.О ССС складывают по способу силового многоугольника и получаем одну силу в т.О – это главный вектор.
Полученную систему присоединённых пар сил также можно сложить и получить одну пару сил, момент которой называется главным моментом.
Главный вектор равен геометрической сумме сил. Главный момент равен алгебраической сумме моментов присоединённых пар сил или моментов исходных сил относительно точке приведения.
Определение и свойства главного вектора и главного момента плоской системы сил.
Свойства главного вектора и главного момента
1 Модуль и направление главного вектора не зависят от выбора центра приведения, т.к. при центре приведения силовой многоугольник, построенный из данных сил, будет один и тот же)
2.Величина и знак главного момента зависят от выбора центра приведения, т.к. при перемене центра приведения меняются плечи сил, а модули их остаются неизменными.
3. Главный вектор и равнодействующая системы сил векторно равны, но в общем случае не эквивалентны, т.к. ещё имеется момент
|
|
|
4. Главный вектор и равнодействующая эквивалентны лишь в частном случае, когда главный момент системы равен нулю, а это при случае, когда центр приведения находится на линии действия равнодействующей
Рассмотрим плоскую систему сил (F1,F2, ...,Fn),действующих на твердое тело в координатной плоскости Oxy.
Главным вектором системы сил называется вектор R, равный векторной сумме этих сил:
R = F1 + F2 + ... + Fn =  Fi.
Fi.
Для плоской системы сил ее главный вектор лежит в плоскости действия этих сил.
Главным моментом системы сил относительно центра O называется вектор LO, равный сумме векторных моментов этих сил относительно точки О:
LO = MO(F1) +MO(F2) + ... +MO(Fn) = MO(Fi).
Вектор R не зависит от выбора центра О, а вектор LO при изменении положения центра О может в общем случае изменяться.
Для плоской системы сил вместо векторного главного момента используют понятие алгебраического главного момента. Алгебраическим главным моментом LO плоской системы сил относительно центра О, лежащего в плоскости действия сил, называют сумму алгебраических моментов этих сил относительно центра О.
Главный вектор и главный момент плоской системы сил обычно вычисляется аналитическими методами.
Дата добавления: 2018-05-09; просмотров: 1976; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!