Принципы регулирования, используемые в алгоритмах работы АБС.

1- главный тормозной цилиндр (тормозной кран), 2 - исполнительная часть АБС, 3 - рабочий тормозной цилиндр (тормозная камера), 4 - регулируемое колесо, 5 - сенсорная часть АБС, 6 - блок управления.
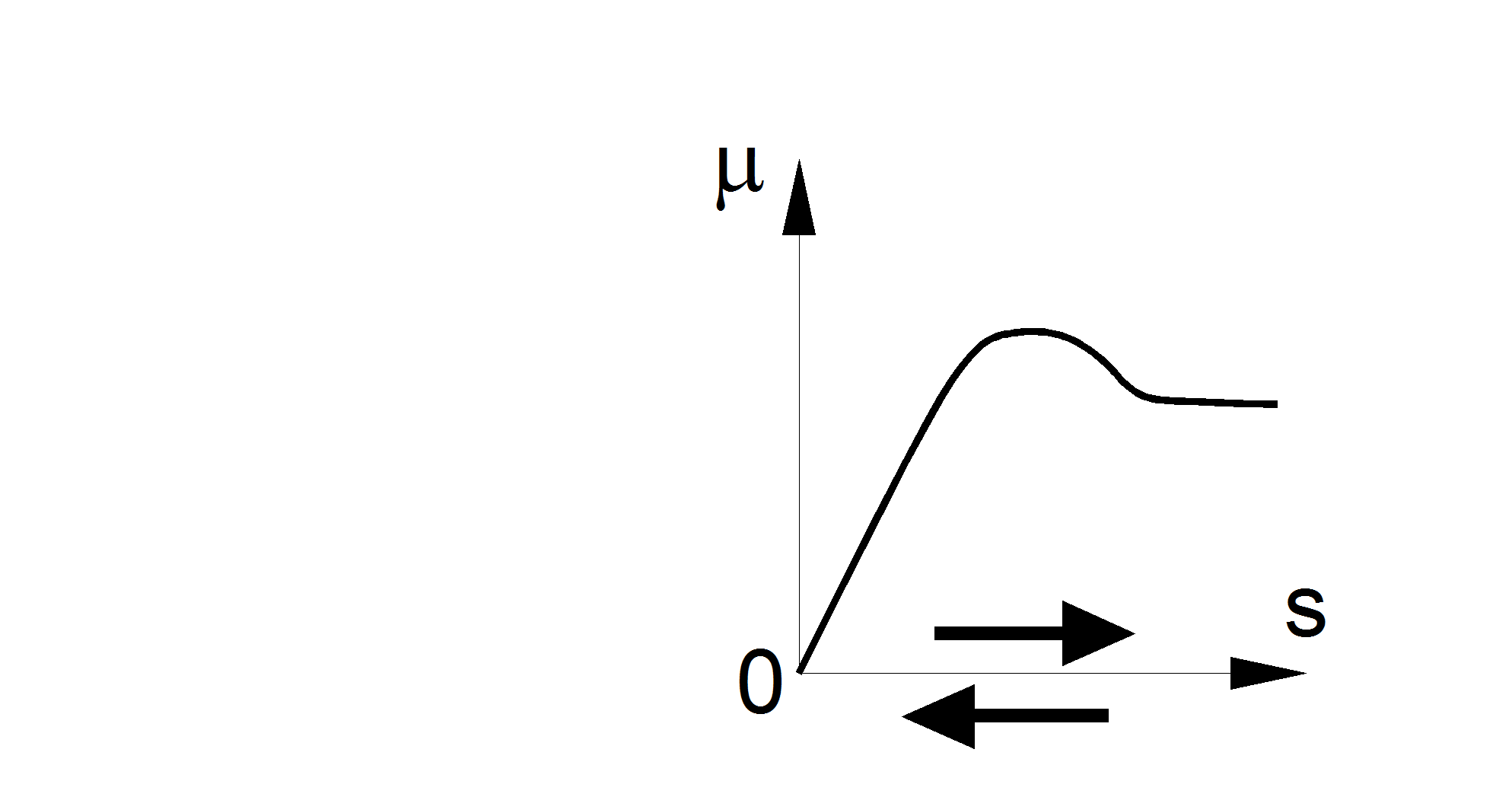 <- S - РЕГУЛИРОВАНИЕ (РЕГУЛИРОВАНИЕ ПО ЗАМЕДЛЕНИЮ)
<- S - РЕГУЛИРОВАНИЕ (РЕГУЛИРОВАНИЕ ПО ЗАМЕДЛЕНИЮ)
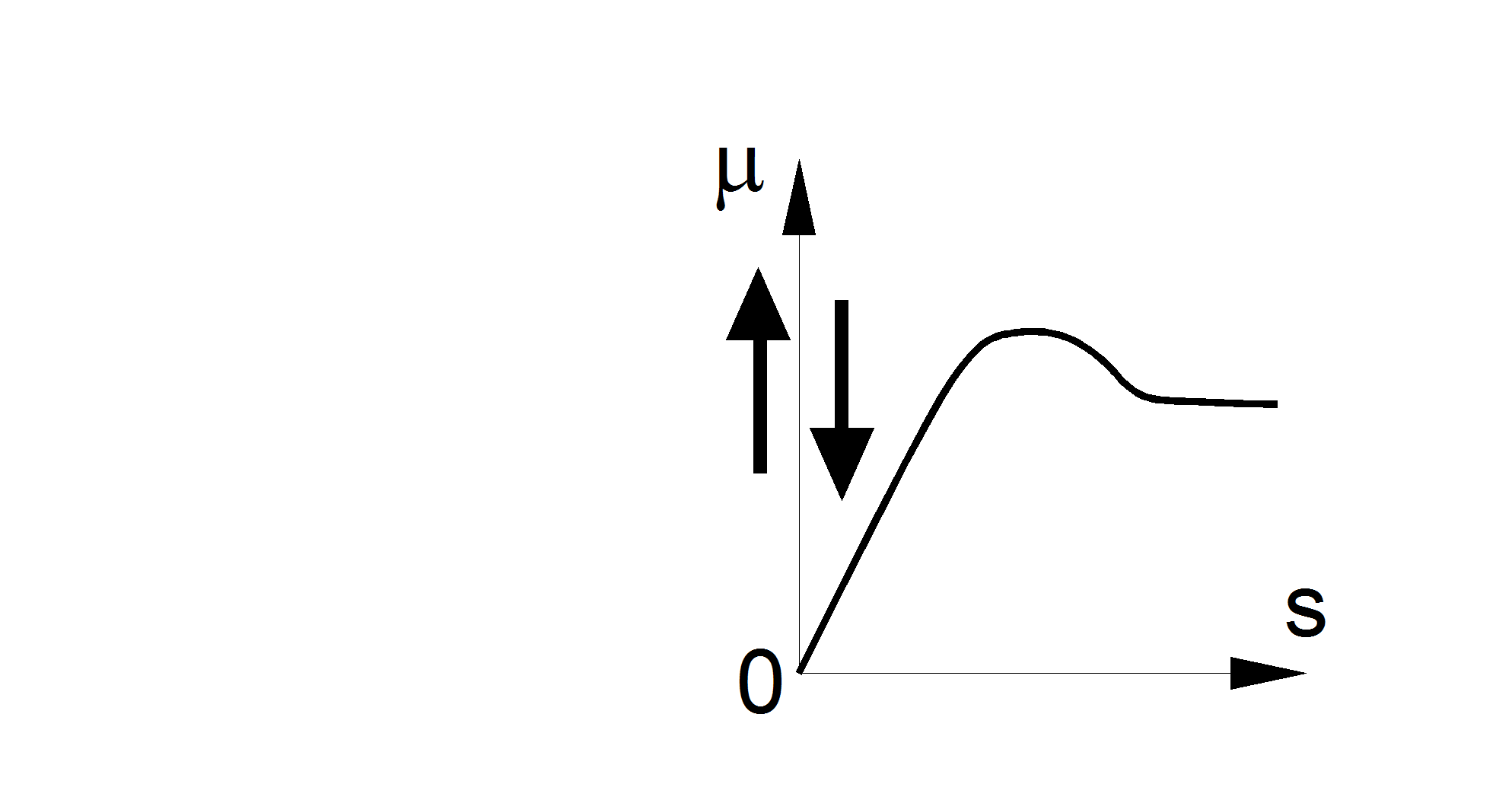 <- m - РЕГУЛИРОВАНИЕ (РЕГУЛИРОВАНИЕ ПО СКОЛЬЖЕНИЮ)
<- m - РЕГУЛИРОВАНИЕ (РЕГУЛИРОВАНИЕ ПО СКОЛЬЖЕНИЮ)
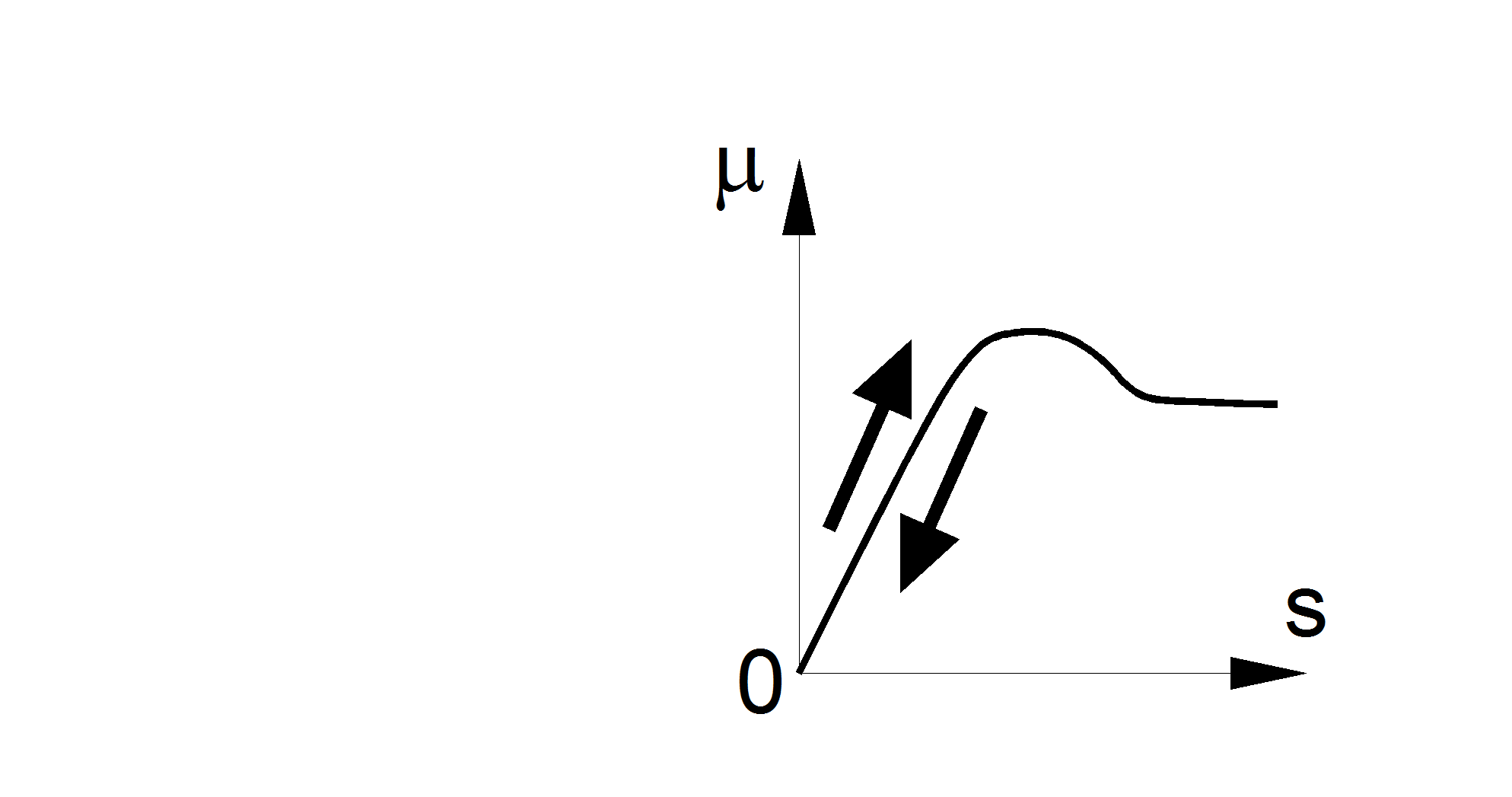
<- ГРАДИЕНТНОЕ РЕГУЛИРОВАНИЕ (КОМБИНИРОВАННОЕ РЕГУЛИРОВАНИЕ)
Принципы регулирования ABS.
· IR – ИНДИВИДУАЛЬНОЕ РЕГУЛИРОВАНИЕ
INDIVIDUAL REGULATION
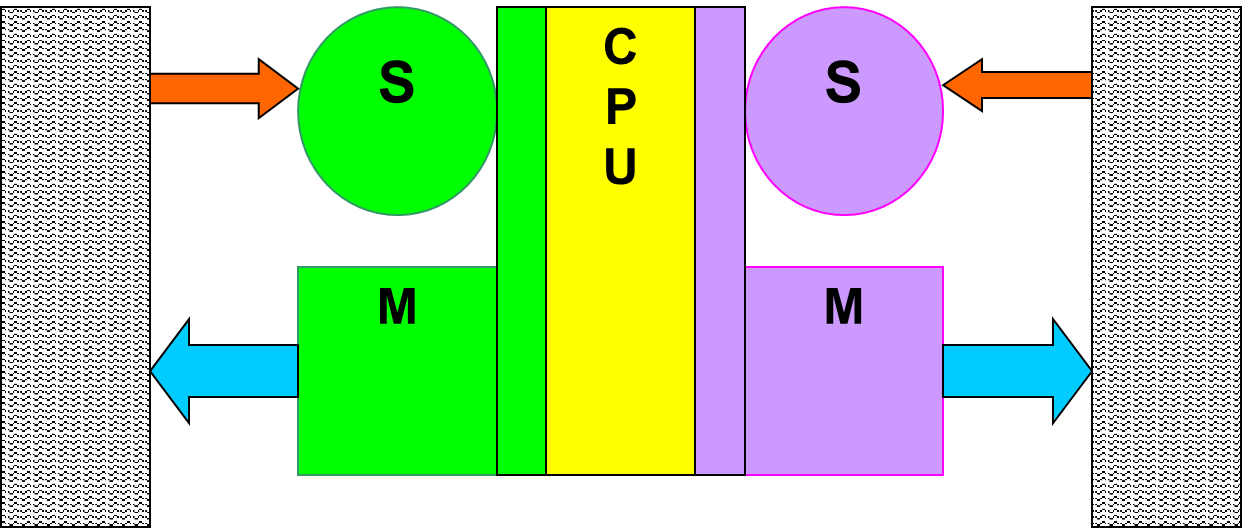
S – ДАТЧИК ЧАСТОТЫ ВРАЩЕНИЯ КОЛЕСА; М – МОДУЛЯТОР; CPU – ЭЛЕКТРОННЫЙ БЛОК УПРАВЛЕНИЯ.
· InR – КОСВЕННОЕРЕГУЛИРОВАНИЕ
INDIRECT REGULATION

S – ДАТЧИК ЧАСТОТЫ ВРАЩЕНИЯ КОЛЕСА; М – МОДУЛЯТОР; CPU – ЭЛЕКТРОННЫЙ БЛОК УПРАВЛЕНИЯ
· SH – ВЫСОКОПОРОГОВОЕ РЕГУЛИРОВАНИЕ
SELECT-HIGH
· SL – НИЗКОПОРОГОВОЕ РЕГУЛИРОВАНИЕ
SELECT-LOW
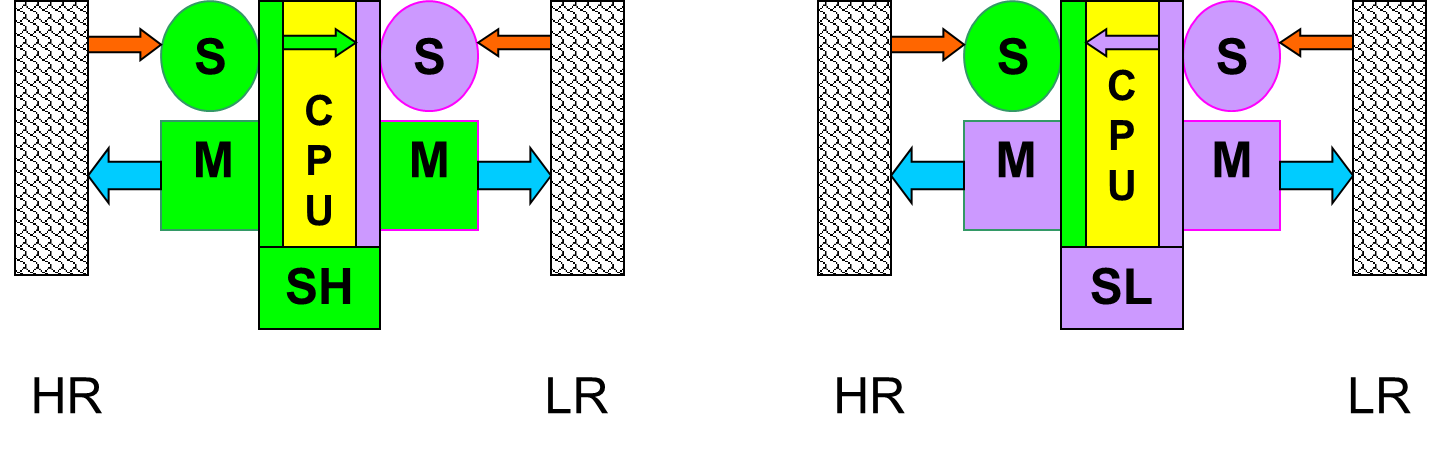
HR – КОЛЕСО С ЛУЧШИМИ СЦЕПНЫМИ УСЛОВИЯМИ; LR – КОЛЕСО С ХУДШИМИ СЦЕПНЫМИ УСЛОВИЯ
· MIR – МОДИФИЦИРОВАННОЕ
ИНДИВИДУАЛЬНОЕ РЕГУЛИРОВАНИЕ

HR – КОЛЕСО С ЛУЧШИМИ СЦЕПНЫМИ УСЛОВИЯМИ
LR – КОЛЕСО С ХУДШИМИ СЦЕПНЫМИ УСЛОВИЯМИ
Уравнение силового баланса автомобиля.
С целью решения уравнения движения автомобиля методом силового баланса, представим его в виде:  Учитывая, что
Учитывая, что  для случая разгона автомобиля, перепишем это уравнение следующим образом:
для случая разгона автомобиля, перепишем это уравнение следующим образом:  . Полученное уравнение называют уравнением силового баланса.
. Полученное уравнение называют уравнением силового баланса.
Уравнение силового баланса показывает, что сумма всех сил сопротивления движению в любой момент времени равна окружной силе на ведущих колесах автомобиля.
Заменим обозначения сил их развернутыми выражениями

 – полная масса автомобиля, кг;
– полная масса автомобиля, кг;
 – сила тяжести автомобиля, Н;
– сила тяжести автомобиля, Н;
 – расчетный радиус качения ведущих колес, м;
– расчетный радиус качения ведущих колес, м;
 – передаточное число трансмиссии;
– передаточное число трансмиссии;
 – коэффициент сопротивления воздуха, Н∙
– коэффициент сопротивления воздуха, Н∙  ;
;
 – коэффициент полезного действия трансмиссии;
– коэффициент полезного действия трансмиссии;
 – скорость движения автомобиля, м/с;
– скорость движения автомобиля, м/с;
 – площадь лобового сопротивления автомобиля,
– площадь лобового сопротивления автомобиля,  ;
;
 – коэффициент дорожного сопротивления;
– коэффициент дорожного сопротивления;
 – коэффициент учета вращающихся масс автомобиля;
– коэффициент учета вращающихся масс автомобиля;
 – крутящий момент двигателя, Н∙м.
– крутящий момент двигателя, Н∙м.
Это уравнение позволяет определить величину окружной силы, развиваемой на ведущих колесах автомобиля, и установить, как она распределяется по различным видам сопротивлений.
Геометрический расчет коробок передач.
Заключается в выборе mn, z, b, aW, определении диаметров зубчатых колес, геометрических параметров зацепления α, β, ha*, C*, x, rf*.
Последовательность геометрического расчета
1) Выбирается аw
Формула Хельдта по величине выходного крутящего момента
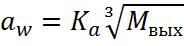
 =8,6…9,6
=8,6…9,6
> к ускоряющим передачам и к авто с диз ДВС
2) Выбор предварительного значения угла наклона линии зуба β
Βmin=18…22⁰ для гр/а
Βmin=24⁰ для л/а
Βmax=34⁰ для л/а
3) Выбор нормального модуля и исходного контура зубчатых колес
mn =2,25…5,0 мм
Угол зацепления α=20 ⁰
ha*=1 - коэфициент головки зуба
hf*=1 – коэф. Ножки зуба
C*=0,25 – к. радиального зазора
rf*=0,4
4) Определение  , уточнение β и расчет
, уточнение β и расчет  - сумма коэфициентов смещения шестерни колеса пары.
- сумма коэфициентов смещения шестерни колеса пары.
 ,
, 
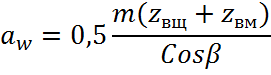
5) Окружной модуль зубчатых колес

6) Определение чисел зубьев зубчатых колес
U*=Ui’=Un – передаточное отношение зубчатой пары
7) Определение действительных значений Ui’ и Unзубчатых пар.
 , где U*=Ui’=Un
, где U*=Ui’=Un
8) Определение действяительных значений передаточных чисел КП
Ui=Ui’∙Un
9) Определение ошибки

10) Расчет диаметра зубчатых колес
d=z∙mt,da=d+2mn(h*+x), df=d-2mn(h*+C*-x)
 ,
,
11) Ширина зубчатых венцов

 ,
, 
Дата добавления: 2018-04-15; просмотров: 920; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!