Основные виды автоматического управления. Стабилизация
Оглавление
1.Основные принципы управления. 2
2. Основные виды автоматического управления. Стабилизация. 3
Программное управление. Следящие системы. 3
5.Уравнения динамики и статики. 5
6.Преобразование Лапласа. 7
7.Передаточные функции. 8
9.Частотные характеристики. 9
10.Логарифмические частотные характеристики. 10
11.Реакция системы на гармоническое воздействие. 11
12.Временные характеристики. 13
13.Элементарные звенья. Пропорциональное, интегрирующее, дифференцирующее звенья. 14
14. Элементарные звенья. Апериодическое, форсирующее звенья. 16
15. Элементарные звенья. Колебательное, консервативное, и апериодическое второго порядка. 18
16.Элементарные звенья. Неминимально-фазовое, изодромное звенья. 20
17.Структурные схемы. 22
18.Понятие устойчивости. 24
19.Общая постановка задачи устойчивости по А.М. Ляпунову. 25
20.Теорема А.М. Ляпунова об устойчивости движения по первому приближению. 26
21.Условия устойчивости линейных САУ. 27
22.Алгебраические критерии устойчивости. 28
23.Принцип аргумента. 29
24. Критерий устойчивости Михайлова. 31
25. Критерий устойчивости Найквиста. 34
26.Правило переходов. Критерий устойчивости Найквиста. 37
27.Анализ устойчивости по логарифмическим частотным характеристикам. 38
28.Построение областей устойчивости. 39
29. Устойчивость систем с запаздыванием.. 43
30.Оценка качества регулирования в установившемся режиме. 48
31. Оценка качества переходного процесса при воздействии ступенчатой функции. 50
|
|
|
34. Среднегеометрический корень. 52
35. Диаграмма Вышнеградского. 53
Основные принципы управления.
 Под управляемой системой подразумевается техническая система, предназначенная для управления показателями, характеризующими протекание технического процесса. Значения показателей
Под управляемой системой подразумевается техническая система, предназначенная для управления показателями, характеризующими протекание технического процесса. Значения показателей  называются выходными переменными, иногда координатами процесса.
называются выходными переменными, иногда координатами процесса.
Известны три основных принципа управления:
а) разомкнутогоуправления;
б) компенсации(управление по возмущению);
в) обратной связи (регулирование по отклонению).
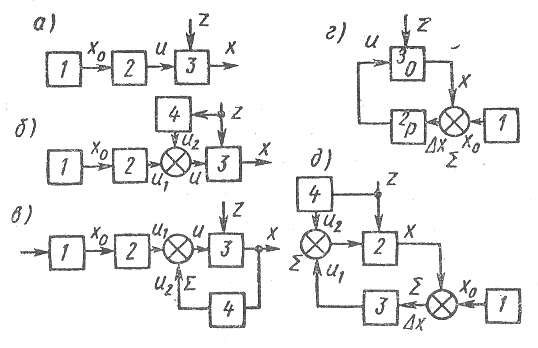
Принцип разомкнутого управления
Сущность принципа состоит в том, что алгоритм управления вырабатывается только на основе заданного алгоритма функционирования и не контролируется другими факторами - возмущениями или выходными координатами процесса. Задание  алгоритма функционирования может вырабатываться как специальным техническим устройством - задатчиком программы 1, так и выполняться заранее при проектировании системы и затем непосредственно использоваться при конструировании управляющего устройства 2. В последнем случае блок 1 на схеме отсутствует. В обоих случаях схема имеет вид разомкнутой цепочки, в которой основное воздействие передается от входного элемента к выходному элементу 3, как показано стрелками. Близость x и
алгоритма функционирования может вырабатываться как специальным техническим устройством - задатчиком программы 1, так и выполняться заранее при проектировании системы и затем непосредственно использоваться при конструировании управляющего устройства 2. В последнем случае блок 1 на схеме отсутствует. В обоих случаях схема имеет вид разомкнутой цепочки, в которой основное воздействие передается от входного элемента к выходному элементу 3, как показано стрелками. Близость x и  в разомкнутых системах обеспечивается только конструкцией и подбором физических закономерностей, действующих во всех элементах.
в разомкнутых системах обеспечивается только конструкцией и подбором физических закономерностей, действующих во всех элементах.
|
|
|
Принцип компенсации (управление по возмущению)
Если возмущающие воздействия настолько велики, что разомкнутая цепь не обеспечивает требуемой точности выполнения алгоритма функционирования, то для повышения точности иногда возможно, измерив возмущение, ввести по результатам измерения коррективы в алгоритм управления, которые компенсировали бы вызываемые возмущениями отклонения алгоритма функционирования.
Так как отклонение регулируемой величины зависит не только от управляющего U, но и от возмущающего Z воздействия, т. е.  , то в принципе можно подобрать управление
, то в принципе можно подобрать управление  таким образом, чтобы в установившемся режиме отклонение отсутствовало, т. е.
таким образом, чтобы в установившемся режиме отклонение отсутствовало, т. е.
 . (1.1)
. (1.1)
Так, в простейшем линейном случае, если характеристика объекта с
 , то выбирая
, то выбирая  , получим
, получим  .
.
Принцип обратной связи. (регулирование по отклонению)
Систему можно построить и так, чтобы точность выполнения алгоритма функционирования обеспечивалась и без измерения возмущений. На рис.1.3впоказана схема, в которой коррективы в алгоритм управления вносятся по фактическому значению координат в системе. Для этой цели в конструкцию системы вводят дополнительную связь 4, в которую могут входить элементы для измерения хи для выработки корректирующих воздействий на управляющее устройство. Схема имеет вид замкнутой цепи, что дало основание назвать осуществляемый в ней принцип принципом управления по замкнутому контуру. Введенную дополнительную цепь называют цепьюобратной связи,так как направление передачи воздействий в дополнительной связи обратно направлению передачи основного воздействия на объект. Схема, изображенная на рисунке в),представляет собой наиболее общий вид замкнутых систем.
|
|
|
Основные виды автоматического управления. Стабилизация.
Дата добавления: 2018-04-05; просмотров: 832; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!