Постоянного тока независимого возбуждения
Аналитическое выражение электромеханических w=f(I) и механических w=f(M) характеристик ДНВ:
 ;
;
 ,
,

где знак ”+” соответствует режиму рекуперативного (генераторного) торможения, а знак “-” режимам двигательному, противовключения и динамического торможения; U - напряжение питания двигателя; I - ток якоря двигателя; RS - сопротивление якорной цепи, состоящее в общем случае из сопротивлений добавочного резистора RД и якоря  ;
;  ,
,  ,
,  , - сопротивления соответственно обмотки якоря, дополнительных полюсов и компенсационной обмотки; М - электромагнитный момент двигателя; кФ - соответственно конструктивный коэффициент и магнитный поток двигателя; С - коэффициент связи двигателя;
, - сопротивления соответственно обмотки якоря, дополнительных полюсов и компенсационной обмотки; М - электромагнитный момент двигателя; кФ - соответственно конструктивный коэффициент и магнитный поток двигателя; С - коэффициент связи двигателя;  - скорость идеального холостого хода;
- скорость идеального холостого хода;  - падение скорости относительно скорости при изменении нагрузки от нуля до заданного значения.
- падение скорости относительно скорости при изменении нагрузки от нуля до заданного значения.
Возможные режимы работы электродвигателя:
- двигательный режим (характеристика 1-2, рис. 1.2.);
- режим рекуперативного (генераторного) торможения (характеристика 2-3);
- режим торможения противовключением при сохранении полярности питающего напряжения и наличии активной нагрузки (характеристика 1-4);
- режим динамического торможения с независимым возбуждением (характеристика 0-5).
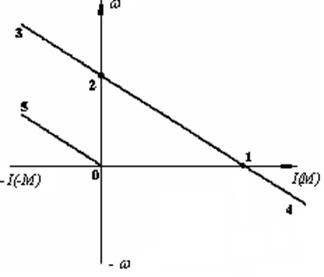
Рис. 1.2. Электромеханические и механические характеристики
электропривода с ДПТ НВ
Скорость вращения в электроприводе с ДПТ независимого возбуждения регулируют изменением питающего напряжения U, включением в якорную цепь добавочного сопротивления  , изменением магнитного потока Ф. На рис. 1.3, показаны естественная характеристика и искусственные характеристики при указанных способах регулирования.
, изменением магнитного потока Ф. На рис. 1.3, показаны естественная характеристика и искусственные характеристики при указанных способах регулирования.
|
|
|
 |
Рис. 1.3. Естественная и искусственные электромеханические и
механические характеристики ДПТ НВ:
1 - естественная (U=UН; Ф=ФН; RД=0);
2 - искусственная (RД¹0);
3 - искусственная (U<UН);
4 - искусственная (Ф<ФН)
Принципиальная электрическая схема стенда
Принципиальная электрическая схема стенда приведена на рис. 1.1.
От трехфазной сети 380 В с нулевым проводом напряжение подается на трехполюсный автомат QF1 (установленный на левой боковой панели приборного блока), который является общим коммутирующим и защитным аппаратом. Преобразованное в постоянное, с помощью полупроводникового выпрямителя, напряжение регулируется ступенчато переключателем S1 (в положении 3 переключателя напряжение максимально и равно 27В).
Напряжение 27В подаётся на цепи якорей исследуемого и нагрузочного двигателей включением переключателей соответственно S2 и S3, под током цепи коммутируются автоматами QF2 и QF3. Токи в силовых цепях двигателей измеряются амперметрами РА1 и РА2, а в цепях возбуждения – РА3 и РА4.
|
|
|
В цепи якорей исследуемого и нагрузочного двигателей включены изменяющиеся ступенчато добавочные сопротивления RД1 и RД2 с помощью переключателей R1 и R2. Значения сопротивлений определяются по выражению R=0,5N (Ом), где N – номер положения переключателей R1 и R2.
Нагрузочный двигатель реверсируется изменением полярности напряжения на его обмотке возбуждения EW2 с помощью переключателя S4. Ток возбуждения исследуемого двигателя регулируется потенциометром R3, нагрузочного – R4.
Измерение скорости вращения производится цифровым тахометром.
Для величин исследуемого двигателя М1 принят индекс 1, для нагрузочного двигателя М2 – индекс 2.
Согласное или встречное включение двигателей М1 и М2 устанавливаем по изменению скорости вращения предварительно включенного двигателя: если после пуска другого двигателя скорость возросла – двигатели включены согласно, если скорость снизилась – двигатели включены встречно.
Программа экспериментов
Порядок экспериментального исследования электропривода:
- проверка работоспособности стенда;
- определение коэффициента связи  исследуемого двигателя М1;
исследуемого двигателя М1;
- снятие характеристик электропривода изменением напряжения питания U двигателя;
|
|
|
- снятие характеристик электропривода введением добавочного сопротивления Rд в якорную цепь двигателя;
- снятие характеристик электропривода изменением магнитного потока Ф обмотки возбуждения двигателя;
- исследование режима рекуперативного торможения;
- исследование режима торможения противовключением;
- исследование режима динамического торможения.
При проведении экспериментов необходимо соблюдать следующие основные требования:
- перед пуском двигателей или реверсом нагрузочного двигателя (М2) переключатели сопротивлений R1 и R2 должны находиться в положении “10”;
- ток возбуждения IВ2 нагрузочной машины до пуска или реверса установить максимальный;
- переключатель S2 (S3) и автомат QF2 (QF3) замыкать в последовательности: переключатель-автомат, а размыкать: автомат-переключатель;
- не допускать длительно токи якорей машин более 1,5IН;
- завершив работу, коммутационные аппараты выключить, переключатели сопротивлений R1 и R2 поставить в положение “10”.
Дата добавления: 2018-04-05; просмотров: 358; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!