Механические характеристики электрических двигателей и производственных механизмов.
Понятие электропривода. Основные понятия. Обобщенная структура электропривода.
Электроприводом (ЭП) называется электромеханическая система, состоящая из электродвигательного, преобразовательного и управляющих устройств, предназначенная для приведения в движение исполнительных органов рабочих машин и управления этим движением.
 силовой канал,
силовой канал,
 управляющий канал,
управляющий канал,
 обратные связи.
обратные связи.
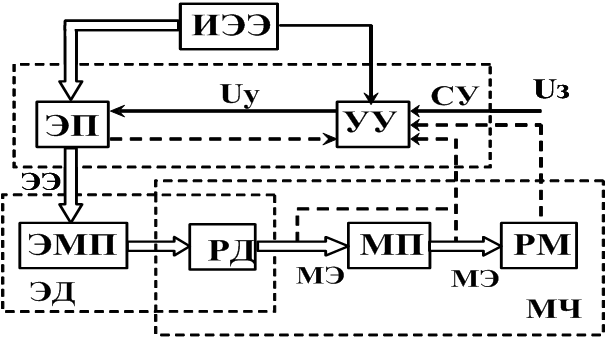 ИЭЭ – источник электрической энергии;
ИЭЭ – источник электрической энергии;
СУ – система управления;
УУ – управляющее устройство;
ЭП – силовая часть электропривода;
ЭЭ – электрическая энергия;
ЭД – электродвигатель;
ЭМП – Электромеханический преобразователь;
РД – ротор двигателя;
МЭ – механическая энергия;
МП – механический преобразователь;
РМ – рабочая машина;
МЧ – механическая часть;
Uз - напряжение задания;
Uу - напряжение управления.
Электрический привод всегда имеет 2 канала: силовой и информационный
- по первому каналу преобразуется энергия,
- по второму каналу сигналы управления и обратной связи.
Силовой канал состоит из электрической и механической части.
Требования, предъявляемые к электроприводу. Классификация электроприводов.
Общие требования к ЭП:
1. Надежность. ЭП должен обеспечить выполнение заданных функций в оговоренное время.
2. Точность. ЭП должен обеспечить отклонение какого-либо показателя движения от заданного допустимого значения.
3. Быстродействие. Способность системы реагировать на управляющие и возмущающие воздействия в заданный период времени.
4. Качество динамики. ЭП должен обеспечить протекание переходных процессов за заданный промежуток времени и с ограничением (при необходимости) различных фазовых координат.
5. Энергоемкость. Удельный расход электроэнергии на получение конечного результата, КПД.
Классификация ЭП:
1. По виду движения:
а) вращательного движения;
б) поступательного;
в) возвратно-поступательного;
Могут быть реверсивные и нереверсивные, носить непрерывный или дискретный харкт.
2. По принципам регулирования скорости и положения:
а) нерегулируемый (постоянная скорость);
б) регулируемый(воздействие на скорость ЭП);
в) следящий (производится перемещение в соответствии с задающим сигналом);
г) программно-управляемый (перемещение в соответствии с заданной программой);
д)адаптивный (автоматически обеспечивает оптимальный режим движения исполнительного органа при изменении условий его работы);
е) позиционный (обеспечивает регулирование положения исполнительного органа рабочей машины).
3. По роду механического преобразователя:
а) редукторный электропривод;
б) безредукторный.
4. По роду электрического преобразователя:
а) вентильный электропривод включает ионный и полупроводниковый, который может иметь тиристорный или транзисторный преобразователи;
б) система управляемый выпрямитель - двигатель (регулируемый выпрямитель - двигатель постоянного тока);
в) система генератор - двигатель (двигатель постоянного тока);
г) система преобразователь частоты – двигатель( двигатель переменного тока)
5. По способу передачи механической энергии исполнительному органу:
а) индивидуальный (каждый исполнительный орган рабочей машины приводится в движение отдельным двигателем) основной вид привода;
б) взаимосвязанный (два или несколько электрически или механически связанных электродвигателей);
в) групповой (от одного двигателя приводится в движение несколько машин).
6. По роду тока: постоянного тока, переменного тока.
Механические характеристики электрических двигателей и производственных механизмов.
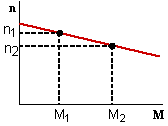 Механическая характеристика это зависимость n=f(M) или
Механическая характеристика это зависимость n=f(M) или  =f(M).
=f(M).
Степень изменения частоты вращения или скорости с изменением момента у различных двигателей неодинакова. Величина, характеризующая это, называется жесткостью механической характеристики.
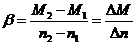 Обычно на рабочем участке механической характеристики жесткость отрицательна, т.е.
Обычно на рабочем участке механической характеристики жесткость отрицательна, т.е.  сл-но с увеличением нагрузки скорость падает.
сл-но с увеличением нагрузки скорость падает.
Все механические характеристики можно разделить на три категории в зависимости от  .
.
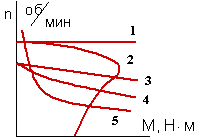 1.бсолютно жесткая характеристика;
1.бсолютно жесткая характеристика;
2.жесткая механическая характеристика в своем рабочем диапазоне.
3,4,5- мягкие механические характеристики, у которых скорость
значительно изменяется с изменением нагрузки.
3-ДПТс нез. возбуждением. 4-ДПТсмешанного возбуждения,
5- ДПТ последовательного возбуждения.
Механические характеристики производственных механизмов.
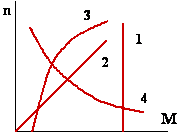 Зависимость между скоростью вращения и моментом сопротивления называется механической характеристикой производственного механизма. Для данных характеристик
Зависимость между скоростью вращения и моментом сопротивления называется механической характеристикой производственного механизма. Для данных характеристик  , где
, где  - момент сопротивления.
- момент сопротивления.
1-Момент не зависит от частоты вращения  . Такой характеристикой обладают почти все механизмы у которых основной момент- момент трения х=1.
. Такой характеристикой обладают почти все механизмы у которых основной момент- момент трения х=1.
2-Линейно возрастающая механическая характеристика  , х=2.
, х=2.
3-нелинейно(параболически) возрастающая механическая характеристика.
 х=2-вентилятор, х=3-насос.
х=2-вентилятор, х=3-насос.
4-нелинейно спадающая.  P=const; х=0.
P=const; х=0.
Все 4 вида характеристик описываются универсальной формулой:
 -момент сопротивления производственного механизма,
-момент сопротивления производственного механизма,
 -момент сопротивления трению в подвижных частях механизма,
-момент сопротивления трению в подвижных частях механизма,
 -номинальный момент сопротивления при номинальной скорости.
-номинальный момент сопротивления при номинальной скорости.
Различают 2 вида статических моментов:
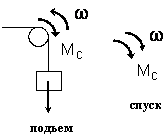
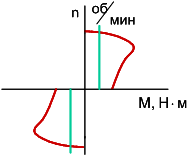 1.Реактивная нагрузка. Всегда препятствует движению и всегда меняет свой знак с изменением направления вращения э.м.(1,3квадрант)
1.Реактивная нагрузка. Всегда препятствует движению и всегда меняет свой знак с изменением направления вращения э.м.(1,3квадрант)
2.Активная нагрузка не только препятствует движению но и может способствовать ему.
Активная нагрузка не меняет своего знака при изменении направления вращения электрической машины и может как препятствовать так и способствовать движению.(1,4 квадрант).
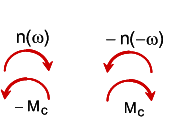
За положительное направление вращения принимается вращение по часовой стрелке.
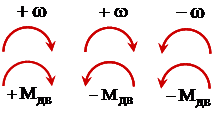 Принимается что момент двигателя имеет тотже знак что и угловая скорость если их направления совпадают.
Принимается что момент двигателя имеет тотже знак что и угловая скорость если их направления совпадают.
 Принимается за положительное направление момент нагрузки, противоположный положительному моменту двигателя.
Принимается за положительное направление момент нагрузки, противоположный положительному моменту двигателя. 
Дата добавления: 2018-02-15; просмотров: 915; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!