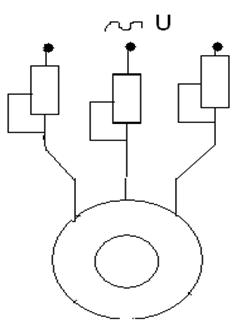
Динамическое торможение (с самовозбуждением )

Схема Динамическое торможение
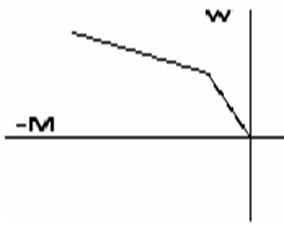
Для выполнения этого торможения необходимо :1)наличие остаточного магнитного потока Фост.
2)совпадения по направлению Фост и Фов.
3)замкнутая цепь якоря.
4)скорость ДПТ должна быть отличная от нуля .
5)наводимая в якоре ЭДС должна быть равна суммарному падению напряжения в резисторах якорной цепи , т.е Е=IR
Принцип: вследствие наличие Фост при вращения якоря в нем наводится ЭДС →по якорю и по ОВ протекает ток →ток создает Ф(основной)который совпадает с Фост →увеличивается ЭДС →I↑, и так будет до тех пор пока ЭДС=IR. Вид кривой характеризуется кривой намагничивания, если Ф не совпадает с Iв то она преломляется вниз.
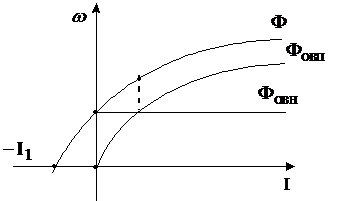
Особенности характеристик ДПТ со смеш.возбуждением
|
|

Последовательная (ОВП) и независимая (ОВН).
Магнитный поток двигателя Ф создается двумя составляющими: ФОВН ,ФОВП.
При I = -I1 магнитный поток Ф = 0, магнитная система размагничена.
|
|
 ;
;  При I = -I1,
При I = -I1,
Ф = 0 и скорость стремится к  .
.
При  момент равен М = 0, при изменении скорости
момент равен М = 0, при изменении скорости  момент изменяется до
момент изменяется до  , а затем уменьшается до нуля.
, а затем уменьшается до нуля.
ДПТ смешанного возбуждения работает в режимах: холостого хода, короткого замыкания, двигательном, генераторном, последовательно, параллельно с сетью и независимо от сети.
Регулирование осуществляется : изменением Ф, тока якоря

Естественные мех. и эл.мех хар-ки АД.

Для исследование АД используют
схему замещения1фазы

 - синхронная скорость
- синхронная скорость
Схема АД
Схема замещения
Где:I1-ток статора;  - приведенный ток ротора;R1- активное сопротивление статора;
- приведенный ток ротора;R1- активное сопротивление статора;  - приведенное активное сопротивление ротора;
- приведенное активное сопротивление ротора;  - приведенное индуктивное сопротивление ротора;X1- индуктивное сопротивление ротора;
- приведенное индуктивное сопротивление ротора;X1- индуктивное сопротивление ротора;
Xm-сопротивление контура намагничивания; s-скольжение  ;
;
из приведенной схемы замещения получаем 
 , w=f(I), таким образом с S↑---
, w=f(I), таким образом с S↑---  ↑ и при S→∞ ,
↑ и при S→∞ ,  =lim
=lim
При (-) S –генераторный режим ток в пределах 0≤ ≤ max
 ;
; 

Электромеханические
характеристики
1-ХХ
2-КЗ
3- 
4- 
Уравнение для w=f(M) получают из баланса мощности роторной цепи  ;
;
 -электромагнитная мощность;
-электромагнитная мощность;  -механическая полезная мощность
-механическая полезная мощность
 подставив значение
подставив значение  получим уравнение w=f(M);
получим уравнение w=f(M);
Из w=f(M) можно увидеть две точки Mкр и Sкр
 Mкр
Mкр 
 ; Sкр
; Sкр 
(+ двигательный режим;- генераторный режим) 

Механические Характеристики
1.-XX
2.- Mкз=Мп
3.-Mкр.дв,Sскр.дв
4.-s→∞;M→0
1)s=0;w=w0- режим идеального ХХ
2)S=1;w=0-режим КЗ
3)0<S<1; 0<w<w0- двигательный режим
4)S<0,W>w0- генераторный режим(рекуперативного торможения)
5)S>1,w<0-генераторный режим (торможение противоключение)
6)режим Динамического торможения-статор,к const ток,цепь ротора замыкается накоротко
Искусственные механические и электромеханические характеристики асинхронного двигателя при изменении активных сопротивлений.
 Регулирование АД с помощью активного Rд в роторе
Регулирование АД с помощью активного Rд в роторе
 Электрическая схема
Электрическая схема
Rде<Rд1<Rд2
Основные соотношения:
R=var↑ Mкр=const из w=f(M)
R=var↑ Sкр↑ var из соотношения Sкр 
R=var↑  ↓ var из соотношения для W=f(I)
↓ var из соотношения для W=f(I)
R=var↑ I1↓ var
R=var↑ w0=const т.к 
1)s=0;w=w0- режим идеального ХХ
2)S=1;w=0-режим КЗ
3)0<S<1; 0<w<w0- двигательный режим
4)S<0,W>w0- генераторный режим(рекуперативного торможения)
5)S>1,w<0-генераторный режим (торможение противоключением)
6)режим Динамического торможения - статор, к const ток,цепь ротора замыкается накоротко
Хорош для const нагрузки т.к с увеличением  жесткость падает т.к. один и тот же перепад нагрузки будет давать разные перепады скорости
жесткость падает т.к. один и тот же перепад нагрузки будет давать разные перепады скорости
Достаток :уменьшается пусковой ток , экономичность.
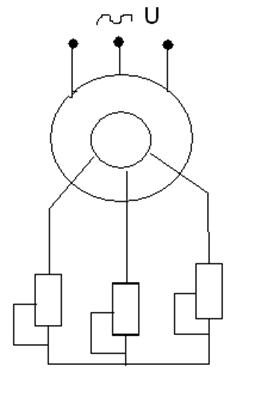
 Регулирование АД с помощью активного Rд в статоре
Регулирование АД с помощью активного Rд в статоре
Электрическая схема
Rде<Rд1<Rд2
Основные соотношения:
R=var↑ Mкр↓ var из w=f(M) R=var↑ Sкр↓ var
R=var↑  ↓ var из соотношения для W=f(I) R=var↑ I1↓ var
↓ var из соотношения для W=f(I) R=var↑ I1↓ var
R=var↑ w0=const т.к 
1)s=0;w=w0- режим идеального ХХ 2)S=1;w=0-режим КЗ 3)0<S<1; 0<w<w0- двигательный режим 4)S<0,W>w0- генераторный режим(рекуперативного торможения) 5)S>1,w<0-генераторный режим (торможение противоключение). Достаток: уменьшается пусковой ток. Недостаток :с увеличением R1 уменьшается рабочая область.
 27. Искусственные механические и электромеханические характеристики асинхронного двигателя при изменении реактивных сопротивлений.
27. Искусственные механические и электромеханические характеристики асинхронного двигателя при изменении реактивных сопротивлений.

Электрическая схема
Xк2>Xк1>Xке
Механическая характеристика
Xк=X1+X2
Основные соотношения:
R=var↑ Mкр↓ var из w=f(M)
R=var↑ Sкр↓ var из соотношения Sкр 
R=var↑  ↓ var из соотношения для W=f(I)
↓ var из соотношения для W=f(I)
R=var↑ I1↓ var
R=var↑ w0=const т.к
1)s=0;w=w0- режим идеального ХХ
2)S=1;w=0-режим КЗ
3)0<S<1; 0<w<w0- двигательный режим
4)S<0,W>w0- генераторный режим(рекуперативного торможения)
5)S>1,w<0-генераторный режим (торможение противоключение )Способ схож с регулирование скорости с помощью активного Rд в статоре
|
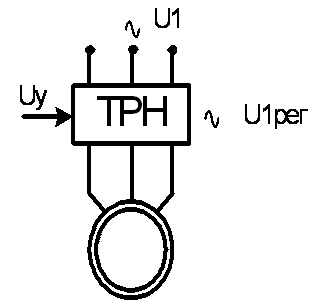

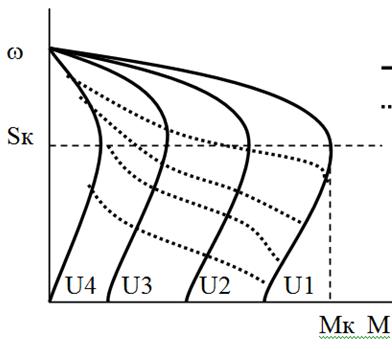
 ТРН – тирристорный регулятор напряжения.
ТРН – тирристорный регулятор напряжения.
U1рег можно менять в диапазоне от 0 до U1н, при этом частота остается постоянной.
Скорость изменяют изменением напряжения, подводимого к статорной цепи.
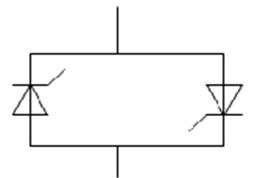
Тиристоры включены встречно-параллельно.
Критические скольжение и момент:
 скольжение не зависит от напряжения.
скольжение не зависит от напряжения.
 ;
;  ;
; 
С уменьшением напряжения падает критический момент.
Электромеханические характеристики.


Хар-ки в разомкнутой системе получаются мягкими при больших углах, поэтому систему замыкают.

Дата добавления: 2018-02-15; просмотров: 1623; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!