Искусственные механические и электромеханические характеристики асинхронного двигателя при изменении частоты питающего напряжения.
Осн. Достоинство: при изменении частоты питающей сети прямопропорционально меняется синхронная скорость  (1)
(1)
Если принять R1 = 0 , то  (2),
(2),
где L – индуктивность КЗ.
Следовательно при ном. Частоте f  , а при
, а при 
Тогда критический момент  (3) ;
(3) ;  ;
; 
Если в (3) подставить  и
и  :
:  (4)
(4)
Если f  , то
, то 
При неизменном напряжении сети с ростом f MКР резко падает, следовательно, чтобы оставить критический момент постоянным(сохранить рабочую зону) необходимо совместно с частотой изменять подводимое напряжение  (4’)
(4’)
При выборе соотношений м.у. f и U чаще всего исходят из условия сохранения перегрузочной способности АД:
 ;
;  (5)
(5)
При ном. режиме работы, когда МС=МН :  (6)
(6)
Приравняв м/у собой (5) и (6) получим:  (7)
(7)
Или в относит.ед. :  (7’)
(7’)
Вывод: U нужно менять не только в зависимости от f, но и в зависимости от U на валу двигателя, это обеспечивает наивыгоднейшие энергетические показатели.
Практически все нагрузки можно описать выражением:
 , Где М0- момент трения
, Где М0- момент трения
Запишем данное уравнение в отн. Ед. :  (8)
(8)
Учитывая что  , следовательно
, следовательно  , Уравнение для нагр.
, Уравнение для нагр.
 (9) И подставив (9) в (7’) получим
(9) И подставив (9) в (7’) получим
 (10)
(10)
Тормозные режимы работы асинхронного двигателя. Рекуперативное торможение и торможение противовключением.
АД имеет 3 торм. Режима:
1) рекуперативное торможение; 2) Торможение противовключением;
3) Динамическое торможение
 1) режим рекуперативного торможения
1) режим рекуперативного торможения
В этом режиме скорость двигателя д/б выше синхронной, след-но скольжение «-»
Акт. Мощность, потребляемая из сети, без учета потерь стали изменяет свой знак,
 т.е. подведенная к валу двигателя механ-ая энергия превр-ся в электрическую. Ур-е мех-й хар-ки остается неизменным только нужно учитывать знаки. Хар-ка для данного режима для «+» напряжения вращения располагается во II квадранте, а для «-» в IV.
т.е. подведенная к валу двигателя механ-ая энергия превр-ся в электрическую. Ур-е мех-й хар-ки остается неизменным только нужно учитывать знаки. Хар-ка для данного режима для «+» напряжения вращения располагается во II квадранте, а для «-» в IV.
Торможение противовключением
 Режим торможения противовключением. Можно получить 2-мя способами
Режим торможения противовключением. Можно получить 2-мя способами
1- Допустим, двигатель работал в точке k на характеристике 1 с чередованием фаз АВС, тогда при переключении хотя бы 2х фаз двигатель переходит в точку d хар-ки 3 чередованием фаз АСВ и участок db является участком торможения противовключения.
При режиме против-я скольжение двигателя S>1, т.к. скорость по отношению к двигательному режиму меняет свой знак.

2- Способ получения против-я (при активной нагрузке), введение добавочных сопротивлений, характеристика 2.
Тормозные режимы работы асинхронного двигателя. Динамическое торможение с независимым и самовозбуждением.
Для того чтобы получить режим динамического торможения машину отключают от сети переменного тока и в две фазы статора подается постоянный ток.  При данном торможении торможение с независимым возбуждением когда в две фазы подают постоянный ток который протекая по обмоткам создают неподвижное в пространстве магнитное поле . Пересекая это поле вращающие проводники ротора индуцируют ЭДС , которая в свою очередь создает в замкнутой цепи ротора ток, которая в свою очередь взаимодействует с неподвижным потоком создавая тормозной режим который тормозит АД.
При данном торможении торможение с независимым возбуждением когда в две фазы подают постоянный ток который протекая по обмоткам создают неподвижное в пространстве магнитное поле . Пересекая это поле вращающие проводники ротора индуцируют ЭДС , которая в свою очередь создает в замкнутой цепи ротора ток, которая в свою очередь взаимодействует с неподвижным потоком создавая тормозной режим который тормозит АД.
 Для вывода уравнения механической характеристике в режиме динамического торможения необходимо найти связь между постоянным током протекающим по обмоткам статора и переменным током, одинаковым по фазам и при условии равенства создаваемых или намагничивающих сил.
Для вывода уравнения механической характеристике в режиме динамического торможения необходимо найти связь между постоянным током протекающим по обмоткам статора и переменным током, одинаковым по фазам и при условии равенства создаваемых или намагничивающих сил.


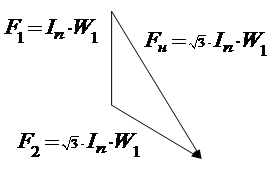
Пользуясь векторной диаграммой определяем намагничивающую силу.

 --- число витков одной фазы статора.Результирующая намагничивающая сила при трехфазном токе;
--- число витков одной фазы статора.Результирующая намагничивающая сила при трехфазном токе;

 ---- действующее значение фазы статора
---- действующее значение фазы статора  ;
; 
Для создания одинаковый магнитный поток постоянный ток должен быть в 1,23 раза больше переменного. Для получения выражения механическую характеристику режима динамического торможения необходимо приравнять мощность на валу  и мощность обмотки ротора
и мощность обмотки ротора  :
:  : (1)
: (1)
 --- абсолютное скольжение(только для данного режима)
--- абсолютное скольжение(только для данного режима)

 Поскольку в режиме динамического торможения постоянный ток в обмотке статора можно заменить эквивалентным ему переменным дающий такое же значения потока то для этого режима можно составить схему замещения.
Поскольку в режиме динамического торможения постоянный ток в обмотке статора можно заменить эквивалентным ему переменным дающий такое же значения потока то для этого режима можно составить схему замещения.
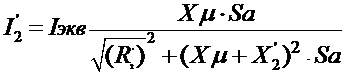 Уравнение электромеханической характеристике АД в режиме динамического торможения. Если подставить в уравнения (1) значение
Уравнение электромеханической характеристике АД в режиме динамического торможения. Если подставить в уравнения (1) значение  получим уравнения механической характеристике в режиме динамического торможения
получим уравнения механической характеристике в режиме динамического торможения
 Значение критического скольжения для динамического торможения
Значение критического скольжения для динамического торможения  ;
; 
Регулировать тормозной момент в режиме динамического торможения можно следующими способами1) Изменяя  в цепи ротора т.к изменяя
в цепи ротора т.к изменяя  , при этом с увеличением R скольжение критическое +увеличивается момент критический остается неизменным.
, при этом с увеличением R скольжение критическое +увеличивается момент критический остается неизменным.

2)Способ изменения значения постоянного тока при этом  соответственно
соответственно  увеличивается
увеличивается


Механические переходные процессы двигателя постоянного тока (многоступенчатый пуск, ступенчатое изменение нагрузки, переход с естественной характеристики на реостатную и наоборот).
1) Многоступенчатый пуск:
Зависимости:  ;
; 
Рассматриваем пуск двигателя в 3 ступени
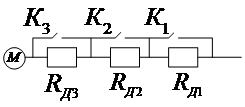



 --- пусковой ток (кратность к номинальному току) определяется исключительно паспортными данными машины.
--- пусковой ток (кратность к номинальному току) определяется исключительно паспортными данными машины.
 --- ток срабатывания коммутации аппаратуры которая последовательно выводит добавочное сопротивления в цепи якоря
--- ток срабатывания коммутации аппаратуры которая последовательно выводит добавочное сопротивления в цепи якоря
 --- ток нагрузки
--- ток нагрузки
Очевидно что на  следовательно большая постоянная времени.
следовательно большая постоянная времени. 
Самый длительный переходный процесс будет на 1—ой характеристики т.к самое большое сопротивление.
 ;
;  :
: 
На участке АВ:  ;
;  ;
;  ;
; 



2) ступенчатое изменение нагрузки

3)переход с реостатной характеристики на естественную


Точка1:  ; Точка2:
; Точка2: 

 4)переход с естественной на реостатную
4)переход с естественной на реостатную
Точка1:  ; Точка2:
; Точка2:  ; Точка3:
; Точка3:  :
: 
Дата добавления: 2018-02-15; просмотров: 801; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!