Определение основных параметров кулачкового механизма с
Качающимся роликовым толкателем
Кинематическая схема кулачкового механизма с качающимся толкателем (коромыслом) показана на рис. 8.6. Коромысло АВ длиной Lкор в процессе работы механизма поворачивается на угол βmax. Профиль 2 кулачка, с которым взаимодействует ролик толкателя, – рабочий профиль кулачка (действительный). Профиль 1, описываемый центром ролика в относительном движении толкателя относительно кулачка, – теоретический профиль.
Основными параметрами такого механизма являются угол βmax , длина коромысла Lкор , минимальный радиус-вектор rmin теоретического профиля кулачка и межосевое расстояние АОК. Критерием выбора параметров служит минимально допустимый угол [γmin ] передачи движения. Если [γmin] не задан, то его следует принимать 45…500.
Рис. 8.6. Кулачковый механизм с коромысловым толкателем
Основные параметры механизма определяются по диаграмме «S–d S / dφ», изображенной на рис.8.7. Построение этой диаграммы аналогично предыдущему построению (рис. 8.5) с учетом следующих особенностей:
– перемещение центра ролика осуществляется по дуге окружности с центром в точке А и радиусом Lкор;
– векторы  , равные графическому изображению аналога скорости dS/dφ, откладываются вдоль оси толкателя;
, равные графическому изображению аналога скорости dS/dφ, откладываются вдоль оси толкателя;
– направление вектора соответствует направлению вектора скорости центра ролика, повернутого на 90° в сторону вращения кулачка;
- масштаб построения μS следует выбирать таким, чтобы длина коромысла изображалась на чертеже в виде отрезка длиной 70…120 мм;
|
|
|
– длину отрезка Z i на диаграмме«S – d S / dφ», в i -м положении коромысла можно определить по следующей формуле:
Z i = Yi Lкор μ dβ/ dφ/ μS ,
где Yi – ордината на диаграмме «dβ/ dφ – φ», выполненной в масштабе μdβ/dφ (рис. 8.7, а) в том же положении механизма.
После соединения концов векторов плавной кривой получается замкнутая кривая.
Из концов векторов на диаграмме проводятся к линии толкателя лучи под углом [γmin], которые пересекаются друг с другом, ограничивая заштрихованную горизонтальными линиями область. Точки, лежащие внутри этой области, могут служить осями вращения кулачка.
Из возможных осей вращения кулачка обычно выбирают ось ОК, максимально приближенную к толкателю. Благодаря чему получается механизм с минимальными размерами.
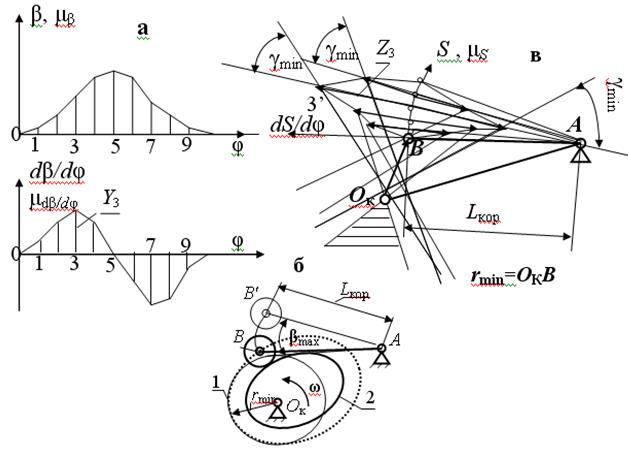
Рис. 8.7. Определение минимального радиуса теоретического профиля
кулачка с качающимся толкателем:
а – кинематические диаграммы движения коромыслового толкателя;
б – схема кулачкового механизма; в – диаграмма «S – d S/ dφ».
В результате построения получается также расстояние АОК между осями вращения кулачка и коромысла.
|
|
|
Определение минимального радиус- вектора rmin кулачка с плоским толкателем (см. рис. 8.8.)

Рис. 8.8. Схема механизма с плоским толкателем
Для определения минимального радиус-вектора r0 кулачка пользуются сложением графиков «S – φ» и «S ’’– φ», которые должны быть построены в одном масштабе μS. Здесь S ’’= d ² S / dφ².
В результате строится зависимость «(S +S’’) – φ». Наибольшая по модулю отрицательная ордината уmax суммарного графика (рис.8.9) позволяет определить минимальный радиус-вектор r0 кулачка из условия выпуклости его профиля по всему периметру:
r0 = | уmax | μS .


Рис. 8.9. К определению минимального радиуса теоретического профиля кулачка с плоским толкателем
Минимальный радиус-вектор теоретического профиля кулачка равен
rmin = r0+ (0,2÷0,4) Smax ,
где Smax – максимальное перемещение толкателя.
Слагаемое (0,2...0,4) Smax рекомендуется принимать из условия контактной прочности высшей кинематической пары.
Построение профиля кулачка
Построение профиля кулачка производится с использованием метода обращенного движения: кулачок на чертеже считают неподвижным, а стойку – вращающейся со скоростью, равной по модулю и противоположной по направлению угловой скорости кулачка.
|
|
|
При профилировании кулачка необходимо обратить внимание на использование крупных масштабов, детальный показ всех линий построения и строгую нумерацию всех точек, используемых при вычерчивании кулачка. На чертеже необходимо выделить утолщенными линиями кинематическую схему механизма, указать теоретический и действительный профили кулачка. Для поступательно перемещающихся толкателей на схеме механизма изобразить направляющую толкателя.
Для толкателей с роликом радиус rрол ролика рассчитать по нижеследующим формулам:
rрол = (0,6...0,8) ρmin ; rрол = (0,25...0,3) rmin ,
где ρmin и rmin – соответственно минимальный радиус кривизны и минимальный радиус–вектор теоретического профиля кулачка. Для построения принять наименьшее значение.
Дата добавления: 2018-10-27; просмотров: 355; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!