П.1.1. ДИНАМИЧЕСКИЙ СИНТЕЗ И АНАЛИЗ МАШИНЫ
При выполнении первого листа проекта необходимо по заданным условиям рассчитать недостающие размеры звеньев проектируемого механизма, произвести структурный анализ, определить аналоги скоростей звеньев, параметры динамической модели и закон движения начального звена рычажного механизма.
Структурный анализ рычажного механизма
Кинематическая схема рычажного механизма показана на рис. П.1.1.
Механизм плоский рычажный.
Для этого механизма n = 5; p5 = 7; p4 = 0.
Степень подвижности плоского механизма определяется по формуле
П. Л. Чебышева:
W = 3 n – 2 p5 ─ p4= 3∙5 ─ 2∙7 – 0 = 1,
где n – число подвижных звеньев; p5 – число пар пятого класса; p4 – число пар четвёртого класса.
Согласно полученному результату для определенности движения всех звеньев механизма необходимо иметь одно входное звено.
Разложение механизма на группы Ассура показано на рис. П.1.6.
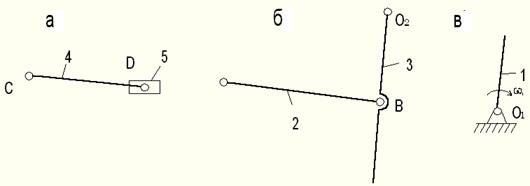
Рис. П.1.6. Строение механизма:
а – группа Ассура 2-го класса 2-го вида 2-го порядка; б – группа Ассура 2-го класса 1-го вида 2-го порядка; в – механизм 1-го класса или группа начальных звеньев
Вывод: рассматриваемый механизм является механизмом 2-го класса.
Построение положений звеньев и диаграммы силы
Сопротивления перемещению выходного звена
Задача о положениях звеньев решается на первом листе проекта графически путем построения кинематической схемы механизма в двенадцати положениях механизма. На плане механизма отобразим входное звено О1А отрезком длиной 20 мм.
|
|
|
Масштабный коэффициент планов механизма
 .
.
Из выполненного построения видно, что начальное звено О1А совершает полный оборот относительно точки О1 .
Во всех положениях механизма углы давления λ действия ведущих звеньев на ведомые не превышают допустимых значений.
В частности максимальный по модулю угол давления шатуна 4 на ползун 5 | λ max.4-5| = 70, угол давления шатуна 2 на коромысло | λ max.2-3| = 170. Эти величины значительно меньше допускаемых углов давления [λ max.4-5] = 300 и [αmax.2-3] = 450.
Так как условия существования кривошипа и благоприятной передачи сил в механизме выполнены, длины звеньев оставляем неизменными.
Определение аналогов скоростей звеньев механизма
Для примера рассмотрим 2-е положение механизма.
Средняя угловая скорость начального звена ОА

Аналог скорости точки А


Аналоги скоростей остальных точек механизма находим путем построения плана аналогов скоростей. Принимаем длину отрезка (pva), изображающего аналог скорость V ’ A точки А, равной 100 мм.
Тогда масштабный коэффициент плана аналогов скоростей
Рассматривая движение точки В вместе с точками А и О2 (переносное движение) и относительно этих точек, получим векторные уравнения для построения скорости точки:
|
|
|


 .
.
Величина (модуль) аналога скорости точки В

Аналог скорости точки С коромысла определяем с помощью теоремы подобия:
 , откуда
, откуда 
Итак, 
Векторные уравнения для нахождения аналога скорости точки D имеют следующий вид:

где  – аналог скорости точки, принадлежащей неподвижной направляющей ползуна D ;
– аналог скорости точки, принадлежащей неподвижной направляющей ползуна D ;
 параллельна направляющей ползуна.
параллельна направляющей ползуна.
Аналог скорости точки D

Определение аналогов скоростей центров тяжести звеньев производится с помощью теоремы подобия:




Определение аналогов угловых скоростей звеньев:
β’1 = 1,



Направление аналога угловой скорости β’2 определяем по относительной линейной скорости. Например, если в положении 2 к точке B приложить вектор  ’ BA, то звено АВ будет вращаться относительно точки А по часовой стрелке. Поэтому β’2 направлена также по часовой стрелке. Направление аналогов угловых скоростей остальных звеньев отыскивается аналогично.
’ BA, то звено АВ будет вращаться относительно точки А по часовой стрелке. Поэтому β’2 направлена также по часовой стрелке. Направление аналогов угловых скоростей остальных звеньев отыскивается аналогично.
На основании планов аналогов скоростей составляется таблица аналогов скоростей точек и угловых скоростей звеньев (табл. П.1.2) для всех положений механизма.
|
|
|
Таблица П.1.2. Аналоги скоростей точек и угловых скоростей звеньев
механизма
| Аналог скорости V’, м. | Положение механизма | |||||||||||
| 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | |
| V’ А | ||||||||||||
| V’ В | ||||||||||||
| V’ С | ||||||||||||
| V’D | ||||||||||||
| V’S 1 | ||||||||||||
| V’S 2 | ||||||||||||
| V’S 3 | ||||||||||||
| V’S 4 | ||||||||||||
| β’2 | ||||||||||||
| β’3 | ||||||||||||
| β’4 | ||||||||||||
Дата добавления: 2018-10-27; просмотров: 217; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!