Определение уравновешивающей силы при помощи теоремы
Н.Е. Жуковского о жестком рычаге
Уравновешивающую силу Fу можно определить, не прибегая к построению планов сил, пользуясь теоремой Жуковского о жестком рычаге. Эта теорема формулируется следующим образом: если все силы, действующие на движущиеся звенья механизма, в том числе и уравновешивающую силу, приложить в соответствующих точках повернутого на 90 о плана скоростей, то сумма моментов всех сил относительно полюса плана скоростей равна нулю.
Пример определения уравновешивающей силы методом
Н.Е. Жуковского
Для кривошипно-ползунного механизма, изображенного на рис. 6.16, требуется определить уравновешивающую силу Ру, приложенную в точке K зубчатого колеса, жестко связанного с кривошипом ОА.
Известны длины звеньев механизма, веса G2 , G3 , силы инерции FИ2, FИ3 звеньев, главный момент сил инерции шатуна АВ и сила F3полезного сопротивления, приложенная к ползуну В. Центр масс кривошипа ОА расположен в точке О.
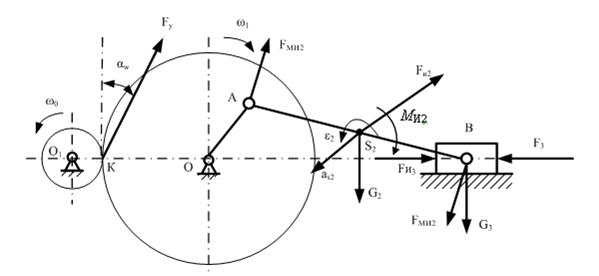
Рис.6.16. Кинематическая схема механизма
Решение
Главный момент сил инерции M И2 шатуна заменим парой сил F МИ2, приложенных в точках А и В.
F МИ2 = МИ2 / lAB .
Переносим все силы с плана механизма, включая F у, в соответствующие точки плана скоростей, предварительно повернув их на 90º по направлению движения часовой стрелки (рис. 6.17).

Рис. 6.17. Жесткий рычаг Н.Е. Жуковского
Из уравнения моментов относительно полюса О V плана скоростей
∑MОv = – F у ∙ h у + F3∙h4 – G2∙ h1+ FMИ2∙h4 – FИ2∙h2 = 0
определяем уравновешивающую силу
F у = (F3∙h4 – G2∙ h1+ FMИ2∙h4 – FИ2∙h2) / h у.
Если при решении этого уравнения Fу получится со знаком плюс, то направление силы Fу на плане механизма выбрано верно. Если со знаком минус, то выбранное направление уравновешивающей силы следует изменить на обратное.
6.1. Последовательность выполнения 2-го листа проекта «Силовой расчет механизма»
Силовой расчет рекомендуется выполнять в такой последовательности.
1. Вычертить в масштабе план механизма в рассматриваемом положении, а также по отдельности все группы Ассура и механизм 1-го класса.
Построение желательно вести для рабочего положения механизма, в котором действуют максимальные внешние силы и силы инерции. Перенести из 1-го листа проекта план скоростей и план ускорений для этого положения.
2. Построить в масштабе план скоростей и план ускорений для рассматриваемого положения механизма.
При этом использовать значения угловой скорости и углового ускорения, полученные в первом листе проекта. Определить угловые скорости и угловые ускорения всех звеньев механизма, а также линейные скорости и ускорения центров шарниров и центров тяжести всех звеньев.
3. Определить внешние силы, действующие на звенья в рассматриваемом положении механизма.
4. Определить главные векторы  и i , Н,сил инерции и главные моменты
и i , Н,сил инерции и главные моменты  и i , кг·м2, сил инерции звеньев для заданного положения механизма.
и i , кг·м2, сил инерции звеньев для заданного положения механизма.
Главные векторы и i сил инерции звеньев прикладываются к центрам масс звеньев
и i = − mi  Si , Н; и i = − IS i
Si , Н; и i = − IS i  i,
i,
где и I – главный вектор и i сил инерции i-го звена; и i – главный момент пар сил инерции i-го звена; Si – вектор ускорения центра массi -го звена,
i − вектор углового ускорения i-го звена.
5. На схемах групп Ассура и на начальном звене выполненных в масштабе, изобразить направления векторов всех активных сил и сил инерции, а также моментов инерции, и указать направления угловых ускорений ε iзвеньев. К свободным элементам кинематических пар групп Ассура приложить составляющие реакций.
6. Для каждой группы Ассура составить алгебраические уравнения моментов сил и векторные уравнения суммы сил и решить их. Векторные уравнения решаются построением планов сил.
7. Определить полные реакции i j во всех кинематических парах, а также уравновешивающую силу  или уравновешивающий момент
или уравновешивающий момент  , приложенный к кривошипу.
, приложенный к кривошипу.
7. СИНТЕЗ ЗУБЧАТОГО МЕХАНИЗМА И ЭВОЛЬВЕНТНОГО ЗАЦЕПЛЕНИЯ
Частота вращения n1 входного вала, как правило, равна частоте вращения вала двигателя. Если в задании на проект не приводится частота вращения двигателя, то она выбирается студентом следующего ряда.
| n, м –1 | 3000 | 1500 | 1000 | 750 |
Для передачи вращательного движения в машинах от входного вала к выходному часто используются передаточные зубчатые механизмы. Передаточным отношением механизма от его входного вала 1 к выходному валу <вых> называют отношение угловых скоростей ω или частот n вращения этих валов:
u1−вых = ω1/ω вых = n1/n вых .
Планетарные зубчатые механизмы по сравнению с другими обладают меньшим весом и габаритными размерами. В большинстве современных зубчатых механизмов используются зубчатые колеса с эвольвентным профилем зубьев. Проектированию указанных механизмов и зубчатых зацеплений посвящен данный раздел.
7.1. Проектирование зубчатого механизма
Выбор схемы планетарного редуктора
При выборе схемы редуктора следует стремиться к наиболее простой и технологичной схеме. Если требуется осуществить большое передаточное отношение, а габариты передачи должны быть минимальными, используют планетарные зубчатые передачи. Наибольшее применение получили планетарные передачи, указанные в табл. 7.1.
Для силовых передач применяют схемы 1 и 2 из табл. 7.1. Редукторы по схемам 3 и 4 используются в приборах из-за малого КПД.
Эффективность планетарных редукторов возрастает с увеличением числа «K» сателлитов благодаря снижению нагрузки на каждый работающий зуб почти в K раз. Поэтому при проектировании редуктора в схему желательно вписать наибольшее число сателлитов.
Таблица 7.1. Основные кинематические схемы планетарных редукторов
| № схемы | Кинематическая схема. | Формула для расчета передаточного отношения u | Рекомен-дуемый диапазон u | КПД планетарной передачи (формула и численный диапазон) |
  1 1
| 3...9 |  η = 0,96 ... 0,98
η = 0,96 ... 0,98
| ||
   2 2
| 7...27 | η = 0,94 ... 0,97 | ||
   3 3
| 30...1500 | η = 0,2 ... 0,6 | ||
  4 4
| 30...1500 | η = 0,2 ... 0,5 |
В табл. 7.1 ψ – общий коэффициент потерь:  ,
,
где ψПГ – коэффициент потерь на трение в подшипниках и масляной ванне;
ψПГ = 0,015 ... 0,03 ; (здесь N – количество центральных колес редуктора);
ψЗi – коэффициент потерь в одном зубчатом зацеплении;
ψЗi = 2,3 f [(1/z1i) +(1/z2i)];
z1i , z2i – числа зубьев колес i-го зацепления;
f –коэффициент трения в зацеплении f = 0,1... 0,06 .
Знак «+» применяют для внешнего зацепления, знак «–»– для внутреннего.
Пример 1
Дано: nдв = 1500 об/мин; nвых = 165 об/мин. Числа зубьев простой одноступенчатой передачи z1 = 16; z2 = 23.
Определить: общее передаточное число приводного механизма и выбрать схему планетарного редуктора для блок-схемы, показанной на рис. 7.1.


Рис. 7.1. Схема приводного механизма
Решение
Общее передаточное отношение механизма
׀ u1−вых ׀ = ׀ n1/n вых׀ = 1500/165 = 9,09 = z2 / z1 ׀ uпл ׀,
где uпл – передаточное отношение планетарного редуктора:
|uпл| = | u1−вых| z1/z2 = 9,09∙16 / 23 = 6,32.
По табл. 7.1 выбираем планетарный редуктор механизма по схеме 1, так как требуемое передаточное отношение |uпл| = 6,32 попадает в рекомендуемый диапазон 3... 9.
Подбор чисел зубьев колёс планетарных передач
При подборе чисел зубьев колес и числа «K» сателлитов планетарного редуктора необходимо одновременно обеспечить следующие условия синтеза:
– обеспечение требуемого передаточного отношения.
Зависимости передаточных отношений от чисел зубьев колес для различных схем редукторов приведены в табл. 7.1.
u1−Н = n1/n Н,
где n1 – частота вращения подвижного центрального колеса 1, n Н – частота вращения водила Н.
– Обеспечение условия соосности, т.е. совпадения осей вращения водила Н и центральных колес 1 и 3.
– Условие соседства должно гарантировать отсутствие касания сателлитов друг за друга при их вращении (в редукторе размещаются K сателлитов).
– Условие сборки позволяет при сборке редуктора обеспечить попадание оси сателлита на палец водила при одновременном вхождении зубьев в зацепление с центральными колесами.
Заметим, что названные условия должны быть выполнены совместно и точно (без округлений и приближений). Допускается только отклонение фактического передаточного отношения редуктора от требуемого. В курсовом проекте допустимую погрешность передаточного отношения следует принимать
Δu / u = ׀ (uтр − uф ) / uтр ׀ ≤ 0,03,
где uтр − требуемое передаточное отношение; uф − фактическое передаточное отношение.
При проектировании редукторов необходимо обеспечить условие правильного зацепления, т.е. невозможность подрезания зубьев и их интерференции.Это условие выполняется для чисел зубьев колес, приведенных в табл. 7.2.
После подбора чисел зубьев колес планетарного редуктора определяется КПД передаточного механизма. При этом учитываются формулы табл. 7.1.
Синтез зубчатой передачи заканчивается вычерчиванием в масштабе на соответствующем листе проекта кинематической схемы механизма в двух проекциях. Радиусы начальных окружностей колес на этой схеме принимаются равными радиусам делительных окружностей, определяемым по формуле ri = m zi /2.
Таблица 7.2. Условие правильного зацепления в редукторах, указанных в табл. 7.1
| Параметра | Обозначение | Величина |
| Число зубьев центрального колеса 1 | z1 | z1 min = 18 для схем № 1...3; z1 = 80...180 для схемы № 1 |
| Число зубьев планетарных колес (сателлитов) | z2 min , z2’ min | 18 |
| Число зубьев центрального колеса 3 | z3 | 80...180 для схем № 1...3; 17…40 для схемы № 4 |
Вблизи схемы механизма на чертежном листе помещается таблица, в которой указываются числа зубьев и частота вращения или угловая скорость колес.
Проектирование планетарного редуктора по схеме 1 (табл. 7.1)
Условие обеспечения заданного передаточного отношения:
u1 −H = 1 + (z3/ z1); (7.1)
условие соосности: z2 = 0,5(z3 – z1); (7.2)
условие соседства: sin(1800/K) > (z2 + z3)/(z3 – z2); (7.3)
условие сборки: (z1 + z3 ) / K = Ц , (7.4)
где Ц − целое число; K − число сателлитов.
Максимальное количество сателлитов, которое можно установить в планетарном редукторе из условия соседства определяется по формуле
Kmax < 1800 / arcsin {[( u1 −H −2) z1 + 4] (z1 ∙ u1 −H) −1}. (7.5)
Условиями синтеза (7.1)...(7.4) определяется следующее соотношение между числами z зубьев колес и количеством K сателлитов.
z1 / z2 / z3 / Ц = 1/ 0,5 (u1 −H −2) / (u1 −H −1) / (u1 −H / K) . (7.6)
При этом z1, z2, z3,Ц – целые числа. Нумерация зубчатых колес соответствует схеме 1 (табл. 7.1).
Пример 2
Подобрать числа зубьев и количество сателлитов планетарного редуктора, схема которого представлена на рис. 7. 2, при u1-H = 6,3 и определить КПД редуктора.

Рис. 7.2. Кинематическая схема планетарного редуктора
Решение
Предварительно задавшись z1 = 20 из условия правильного зацепления,определим максимальное число Kmax сателлитов
Kmax < 1800 / arcsin {[( u1 −H −2) z1 + 4] (z1 u1 −H) −1} =
= 1800 / arcsin {[(6,3 −2) 20 + 4] (20 ∙ 6,3) −1} = 3,91.
Округлим Kmax до ближайшего целого меньшего числа. Итак, максимально возможное число сателлитов K = 3.
Определим число зубьев при количестве сателлитов K = 3 и передаточном отношении редуктора u1 −H = 6,3.
Из соотношения (7.6) имеем
z1 / z2 / z3 / Ц = 1/ 0,5 (u1 −H −2) / (u1 −H −1) / (u1 −H / K) =
= 1/ 0,5 (6,3 −2) / (6,3 −1) / (6,3/ 3) = 20 / 43 / 106 / 42 .
Итак, z1= 20; z2= 43; z3= 106; K = 3.
Эти величины чисел зубьев удовлетворяют условию правильного зацепления и минимальных габаритов.
Проверка полученного решения на выполнение условий синтеза планетарного редуктора производится по формулам (7.1)... (7.4).
Условие обеспечения требуемого передаточного отношения
u1-H ф = 1 + (z3 / z1) = 1 + 106 / 20 = 6,3 – удовлетворяется.
Условие соосности
| |
z2= 0,5(z3− z1) = 0,5 (106 – 20) = 43 – удовлетворяется.
Условие соседства sin(1800/K) > (z2 + 2)/(z3 − z2),
sin (1800/ 3) = 0,866 > (43 + 2) /(106 −43) = 0,714 – удовлетворяется.
Условие сборки (z1+ z3) /K = (20 +106) /3 = 42 – целое – удовлетворяется.
Вывод: выбранные числа зубьев и количество сателлитов удовлетворяют всем условиям синтеза.
Коэффициент полезного действия редуктора найдем по формуле
(табл. 7.1) h1-н = 1 − (z3 y) / (z3 + z1) ,
где h1н – КПД редуктора при ведущем колесе 1 и ведомом водиле Н;
y − суммарный коэффициент потерь y = y ПГ + y31 + y32 ;
yПГ – коэффициент потерь на трение в подшипниках качения и гидравлических потерь в масляной ванне:
yПГ = 0,015... 0,03. Примем yПГ = 0,02;
y31 и y32 – коэффициенты потерь на трение в зубчатых зацеплениях,
y3 i =2,3 f [(1/ z1i) ± (1/ z2i )],
здесь f − коэффициент трения в зацеплении.
Для расчетов примем f = 0,08; z1i и z2i – соответственно число зубьев шестерни и колеса в i -м зацеплении.
Знак <+> ставят при расчете потерь во внешнем зацеплении, знак <–> ставят во внутреннем зацеплении.
Таким образом, имеем:
y = 0,02 + 2,3·0,08 (1/z1+ 1/z2) + 2,3·0,08( 1/z2 – 1/z3 )=
= 0,02 + 2,3∙0,08∙[(1/20)+(1/43)] + 2,3·0,08∙[(1/43) – (1/106)] = 0,036.
КПД планетарного редуктора в соответствии равен
h1-н = 1 − (106∙0,036) / (106 + 20) = 0,97.
Ответ:h = 0,97; z1 = 20; z2 = 43; z3 = 106; K = 3; U1-н = 6,3.
Проектирование планетарного редуктора по схеме 2 (табл.7.1)

Рис. 7.3. Кинематическая схема зубчатого механизма
Условия синтеза рассматриваемого механизма
Примем модули всех зубчатых колес редуктора одинаковыми, а колеса нулевыми, т.е. нарезанными без смещения.
Условие обеспечения требуемого передаточного отношения:
u1-Н = 1+ (z2 z3) / (z1 z2’) ;
условие соседства:
sin(1800/K) > (z2 + 2)/(z1 + z2) и sin(1800/K) > (z2’ + 2)/(z3– z2’);
условие сборки:
[ z3 – (z1 z2’) / z2 ] / K = Ц – целое;
условие соосности:
z1 + z2 = z3 – z2'.
Из условия соседства получим
Kmax = 1800/arcsin [(|u1-2| +2/z1)/(1+|u1-2|)].
В первом приближении примем u1-2 ≈ |u1-H|0,5 – 1.
Из условий синтеза определяется следующее соотношение между числами зубьев колес редуктора:
z1 /z2 /z2' /z3 / Ц =
= 1/(e – 1)/[e (e – 1)/(u1-H – e)] / [e(u1-H – 1)/(u1-H – e)]/{e(u1-H – 2)/[K(u1-H – e)]}. (7.7)
Величина e определяется из неравенства
е ≤ (1+2/z2min) / [1 − sin(180o/K)+(2/z2min)]
и округляется в сторону уменьшения до простой дроби.
Пример 3
Подобрать числа зубьев и число K сателлитов планетарного редуктора по схеме 2, табл. 6.1 (рис. 7.3) при u1-H = 15.
Решение
В соответствии с условием правильного зацепленияпринимаем
z2min = 20; z1 = 20:
u1-2 ≈ |u1-H|0,5 – 1 = 150,5 – 1 = 2,87;
Kmax = 1800/arcsin [(|u1-2| +2/z1)/(1+|u1-2|)] =
= 1800/arcsin [2,87 + (2/20))/(1+2,87)] = 1800 / 50,140 = 3,59.
Принимаем число сателлитов K = 3.
Определим величину e из неравенства
e ≤ (1+ 2/z2min) / [1− sin(180o/K )+(2/ z2min)] =
= (1+2/20) [1+( 2/20) − sin(180o/3)] = 4,7.
Принимаем e = 4.
В соответствии с формулой (7.7) составим соотношение чисел зубьев колес:
z1 /z2 /z2' /z3 / Ц =
= 1/(e – 1)/[e (e – 1)/(u1-H – e)] / [e(u1-H – 1)/(u1-H – e)]/{e(u1-H – 2)/[K(u1-H – e)]}=
= 1/(4 –1)/[4∙(4–1)/(15– 4)] / [4(15– 1)/(15–4)]/{4(15– 2)/[3(15 – 4)]} =
= 1/3/(12/11)/(56/11)/(52/33) = 33 / 99/ 36 / 168 / 52.
Итак, K = 3; z1 = 33; z2 = 99; z2¢ = 36; z3 = 168.
Проверка условий синтеза планетарного редуктора
Указанные числа зубьев удовлетворяют условию правильного зацепления, (см. табл. 7.2) .
Условие обеспечения передаточного отношения
u1H = 1 + (z2 z3 / z1 z2′ ) = 1 + (99∙ 168 / 33∙36) = 15 – удовлетворяется.
Условие соосности
z1+ z2 = z3 – z3¢; 33+99=168 – 36 – удовлетворяется.
Условие соседства
sin(1800/K) > (z2 + 2)/(z1 + z2) и sin(1800/K) > (z2’ + 2)/(z3– z2’);
sin(1800/3) > (99+ 2)/(33 +99), т.е 0,866 > 0,765 и
sin(1800/3) > (36 + 2)/(168 – 36), т.е 0,866 > 0,288 – удовлетворяется.
Условие сборки
[ z3 – (z1 z2’) / z2 ] / K = Ц, где Ц – целое число,
[ 168 – (33∙ 36) / 99] / 3 = 52, т.е. условие сборки удовлетворяется.
Вывод: выбранные числа зубьев и число сателлитов удовлетворяют всем условиям синтеза.
Коэффициент потерь на трение в подшипниках и масляной ванне планетарного редуктора равен
y = yПГ + y31 + y32 = 0,03 + 2,3 f (z1– 1 + z2– 1) + 2,3 f ( z2΄– 1 – z3– 1 ).
Принимая коэффициент трения f = 0,08 и подставляя в формулу численные значения, получим
y = 0,03 + 2,3 ∙ 0,08 (33 – 1 + 99 – 1) + 2,3∙ 0,08 ( 36 – 1 – 168 – 1 ) = 0,0414.
Коэффициент полезного действия редуктора найдем по формуле (см. табл. 7.1, схема 2)
η1–Н = 1 – [(z2 z3 y)/( z2 z3 – z1 z2’)] =
= 1– [(99∙ 168∙ 0,0414)/(99∙ 168 – 33∙ 36)] = 0,954.
Ответ: z1= 33; z2= 99; z2′= 36; z3= 168; K= 3; u1Н= 15. h1Н= 0,954.
На листе изображается в масштабе кинематическая схема спроектированной передачи, включающая последовательно соединенные планетарный и рядный механизмы. Модуль рядной передачи mр определен в задании на проект. Если в проектном задании модуль mпл зацеплений планетарной передачи не указан, то следует принять его равным mпл ≈ 0,5∙ mр
Делительные диаметры зубчатых колес определяются по формуле:
d = m ∙ z , мм.
7.2. Геометрический синтез зубчатого эвольвентного зацепления
В настоящем разделе производится расчет геометрических и качественных параметров и построение профилей зубьев пары цилиндрических эвольвентных прямозубых колес при неравносмещенном зацеплении. Параметры инструментальной рейки: a = 200; ha * = 1; с* = 0,25. Если в задании используются конические зубчатые колеса, то расчет и построение проводят для цилиндрических колес с приведенными числами зубьев.
Дата добавления: 2018-10-27; просмотров: 645; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!