Определение места самолета с использованием ADF.
Определение места самолета по двум радиостанциям. Определять МС по двум РНТ удобно в случае, когда на борту имеется два комплекта АРК, каждый из которых можно настроить на свою радиостанцию. Разумеется, перед определением МС пилот должен убедиться, что АРК правильно настроены, прослушать позывные ОПРС.
По возможности одновременно необходимо зафиксировать по приборам и записать:
- время;
- курс;
- курсовые углы обеих радиостанций (КУР1 и КУР2).
При наличии указателя типа РМИ (радио магнитный индикатор) удобнее, вместо КУР сразу отсчитать и записать МПС1 и МПС2 (напротив тупых концов стрелок).
Время необходимо записать потому, что расчет и прокладка пеленгов займут определенное время и пилот, определив наконец МС, должен знать к какому моменту времени это МС относится – ведь самолет продолжает движение.
После этого необходимо рассчитать ИПС от обеих радиостанций:
ИПС1=МК+КУР1±180+ΔМ+(λр1-λ)sin φср, (37)
ИПС2=МК+КУР2±180+ ΔМ+ (λр2-λ)sin φср, (38)
где λр1 и λр2 - долготы первой и второй радиостанции, а λ – долгота места самолета.
В обеих этих формулах МК (магнитный курс) и ΔМ (магнитное склонение в районе нахождения ВС) имеют одно и то же значение. Различными будут значения КУР и координаты радиостанций.
Если с РМИ были отсчитаны МПС, а не КУР, то к ним нужно прибавить только ΔМ и угол схождения меридианов. Ведь первые три слагаемые в приведенных формулах – это уже и есть МПС, отсчитанный с РМИ.
|
|
|
Как уже упоминалось ранее, для расчета по этим формулам в принципе уже необходимо знать хотя бы примерное местонахождение самолета, чтобы определить магнитное склонение, а также широту и долготу ВС для учета угла схождения меридианов. Если эти величины примерно известны (хотя бы с точностью до градуса), то расчет ИПС можно выполнить сразу по данным формулам. Если же в их примерных значениях нет уверенности или требуется определить МС поточнее, то можно определить МС в два этапа. На первом этапе рассчитать ИПС без учета угла схождения меридианов:
ИПС=МК+КУР±180 + ΔМ (39)
При этом можно использовать какое-либо предполагаемое значение магнитного склонения. Если оно потом окажется не таким, это можно будет исправить на втором этапе.
По полученным приблизительным ИПС строятся ЛРПС в виде прямых линий на карте и по точке их пересечения определяется район вероятного МС. Теперь, когда приблизительное МС уже известно, можно уточнить ΔМ, а также определить приближенную широту и долготу самолета. К приближенным ИПС нужно прибавить углы схождения меридианов и поправку в величину ΔМ, если оно на первом этапе было определено неточно.
|
|
|
Проложив ЛРПС по полученным более точным значениям ИПС, получим МС (рис. 36). Его принято обозначать на карте крестиком с указанием времени, к которому оно относится.

Рис. 36 Определение МС по двум радиостанциям.
Вместо того, чтобы учесть угол схождения δсх по формулам (это последнее слагаемое в формулах (37) и (38)), можно воспользоваться упоминавшимся ранее правилом перехода от одного меридиана к другому. Ведь то, что рассчитано в этих формулах до учета угла схождения меридианов, это тоже ИПС, но только отсчитанный от истинного меридиана места самолета. Остается перейти от него к истинному меридиану радиостанции. Для этого, в соответствии с правилом, при переходе в восточном направлении модуль δсх прибавляется, а если радиостанция западнее самолета – вычитается.
Есть еще один простой способ проверить, с правильным ли знаком учтен угол схождения меридианов. Если δсх учтен правильно (в нужную сторону), то в северном полушарии Земли ЛРПС должны сместиться к северу (на карте как бы вверх). На рис. 37 сплошными линиями обозначены ЛРПС без учета δсх, а пунктирными – когда угол схождения меридианов правильно учтен.

Рис. 37 Изменение пеленгов после учета угла схождения меридианов.
|
|
|
Разумеется, крестик на карте, обозначающий полученное МС, вовсе не означает абсолютно точное место, в котором в данный момент времени находился самолет. Точность определения МС зависит от многих факторов, основными из которых являются следующие:
1. Точность определения пеленгов. Все величины, входящие в формулу для расчета ИПС, не являются абсолютно точными. Погрешности определения каждой из них складываются. Точность определения курса характеризуется средней квадратической погрешностью порядка 1º, курсового угла радиостанции 2-3º . Не абсолютно точным является и магнитное склонение, да и долгота самолета, учитываемая при учете угла схождения меридианов. Суммарная СКП определения пеленга составляет около 3º .
2. Удаление от самолета до каждой из РНТ. Поскольку пеленги рассчитаны неточно, то и ЛРПС проложены не в нужном направлении. А ведь каждый градус погрешности на удалении около 60 км дает линейное смещение ЛРПС величиной в 1 км. Поэтому чем дальше ВС от радиостанции, тем более неточно проходит линия положения.
3. Погрешности графической работы на карте. Вообразим, что пеленги рассчитаны абсолютно точно. Значит ли это, что совершенно точным будет и МС на карте. Разумеется, нет. Ведь пилот будет прокладывать эти пеленги транспортиром. На какие-то доли градуса он ошибется при выравнивании транспортира по меридиану, какую-то погрешность допустит при отсчете угла. Все эти погрешности неизбежны и они являются случайными. Они добавляются к тем погрешностям, которые упоминались ранее. Эксперименты показывают, что СКП графической работы на карте при отсчете углов по транспортиру составляют около 0,8º .
|
|
|
4. Угол пересечения линий положения. На первый взгляд это может оказаться неожиданным, но при прочих равных условиях точность определения МС по двум линиям положения зависит от того под каким углом ω они пересекаются друг с другом. Точность обратно пропорциональна синусу этого угла. Поскольку максимальное значение синус имеет при ω=90º, то в этом случае при прочих равных условиях и будет достигнута максимальная точность. Если же ω=30º, то точность будет вдвое ниже (sin 30º=0,5). А если линии положения пересекаются под совсем уж острым углом, то и погрешность определения МС может быть громадной (рис. 38). В предельном случае, когда ω=0, определить МС вообще невозможно, поскольку обе ЛРПС совпадут, то есть «пересекутся» во всех своих точках.
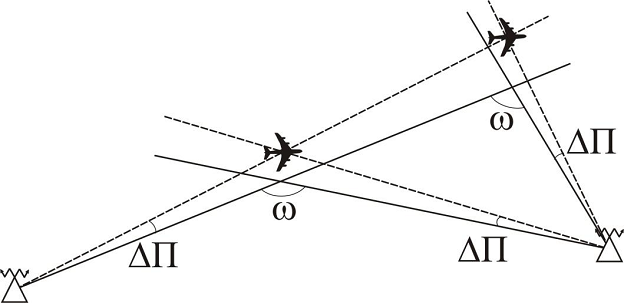
Рис. 38 Влияние угла пересечения ЛРПС на точность определения МС.
Если в районе местоположения ВС имеется несколько ОПРС, то следует выбрать те две из них, которые, во-первых, ближе, а во-вторых такие, чтобы разность пеленгов (или разность КУР – она почти такая же) была ближе к 90º.
Для наглядного представления о достигаемой точности определения МС по двум радиостанциям приведем пример для следующих условий: Удаление до каждой РНТ составляет 100 км, ЛРПС пересекаются под углом 60º .
В этом случае в 80 случаях из 100 (в среднем, конечно) полученное на карте МС будет находиться на далее 10 км от фактического МС. А в 20 случаях из 100 погрешность будет больше 10 км. Понятно, что это не очень высокая точность, несмотря на не столь уж неблагоприятные условия (дальности и угол пересечения могут быть и хуже).
В тех случаях, когда время между первым и вторым пеленгованием 2 мин и более, то необходимо внести поправку на расстояние, пройденное самолетом за это время.
В этом случае необходимо:
а) из точки пересечения пеленгов отложить линию истинного курса и расстояние на ней, пройденное самолетом за время между первым и вторым пеленгованием (рис.40):
Sпр=Wt (40),
или Sпр= Vt; (41)
б) через полученную точку провести линию, параллельную линии первого пеленга. Точка пересечения этой линии с линией второго пеленга будет местом самолета в момент второго пеленгования.
При использовании двух радиокомпасов: после настройки их на радиостанции необходимо отсчитать по первому радиокомпасу КУР1 (ИПС1), а по второму — КУР2 (ИПС2), курс и время пеленгования, после чего рассчитать пеленги и проложить их на карте (рис.40).
Пример. Дано: МК=50º; ΔМ=+8º; КУР1=150º; КУР2=78º; λр=18º; λс=23º; φср=30º; время пеленгования не превышает 2 мин. Рассчитать ИПС1, ИПС2.
Решение.
1) Находим ИК: ИК=МК+(± ΔМ)=50º+(+8º)=58º;
2) Рассчитываем σ по формуле или на НЛ:
σ=( λр-λс)·sin φср=(18º-23º)·sin30º=-5º·0.5=-2,5º
3) Находим ИПС1 и ИПС2:
ИПС1=ИК+КУР1±180º+(±σ)=58º+150º-180º+(-2,5º)=26º
ИПС1=ИК+КУР2±180º+(±σ)=58º+78º+180º+(-2,5º)=314º

Рис. 39 Пояснение к примеру. Определение МВС пеленгованием двух радиостанций.

Рис.40 Определение МВС пеленгованием двух радиостанций при использовании двух АРК и в случае, когда время между первым и вторым пеленгованием 2мин и более.
Определение места самолета по одной радиостанции. В соответствии с обобщенным методом линий положения для определения МС необходимо два навигационных параметра и две соответствующие им линии положения. Казалось бы, что если радиостанция только одна, определить МС невозможно, поскольку в любой момент времени можно определить только один параметр (пеленг самолета).
На самом деле определить МС можно и по одной радиостанции, но только благодаря тому, что ВС движется. Для неподвижного объекта (например, зависшего вертолета) этот способ не годится.
Идея способа основана на том, что во время полета пеленг изменяется и можно построить две ЛРПС, относящиеся к разным моментам времени Т1 и Т2. Очевидно, что в момент Т1 самолет находился в какой-то из точек первой ЛРПС. Если между этими моментами самолет летел с постоянным курсом, то множество точек, в которых он может находиться в момент Т2, представляет собой прямую, параллельною первой ЛРПС и смещенную от нее в ту сторону, в которую летел самолет, и на такое расстояние, которое он пролетел за это время. Следовательно, первую ЛРПС нужно сместить параллельно самой себе. Но чтобы сместить прямую линию, достаточно сместить одну из ее точек и провести через нее параллельную линию. Таким образом первая ЛРПС как бы приводится к моменту времени Т2. И эта смещения ЛРПС пересечется со второй ЛРПС в МС.
Порядок определения МС по одной радиостанции следующий (рис.41).
1) Настроить АРК и убедиться в правильности настройки;
2) Отсчитать МК и КУР, включить секундомер;
3) Выполнять полет с постоянным курсом;
4) Через некоторое время, когда КУР изменится хотя бы на 30º (а это и есть угол пересечения ЛРПС), остановить секундомер, отсчитав по нему время t, записать КУР и текущее время по бортовым часам;
5) Рассчитать два ИПС для каждого момента времени и проложить обе ЛРПС на карте, учитывая угол схождения меридиан;
6) Рассчитать
ФИПУ=МК+УС+ΔМ (42)
и расстояние, пройденное за время t:
S=W·t (43)
Расчет удобно выполнить на НЛ-10;
7) На первой ЛРПС выбрать любую точку и с помощью транспортира провести из нее линию в направлении ФИПУ. Будет точнее, если это точка пересечения ЛРПС с одним из нанесенных на карте меридианов (удастся точнее приложить транспортир). На этой линии отложить рассчитанное расстояние S и через полученную точку провести линию, параллельную первой ЛРПС;
8) МС будет находиться в точке пересечения смещенной ЛРПС со второй ЛРПС. Это МС будет относиться к моменту времени Т2, зафиксированному в штурманском бортовом журнале.

Рис. 41 Определение МС по одной радиостанции.
На точность определения МС будут влиять те же факторы, которые перечислены в предыдущем пункте. Но к ним добавятся и другие – точность расчета ФИПУ и путевой скорости, дополнительная графическая работа на карте, связанная со смещением ЛРПС.
Пожалуй, такой способ определения МС целесообразно применять лишь в том случае, когда других способов не остается. Уж слишком неточным может оказаться результат.
Пример. Дано: МК=130º; ΔМ=+7º; УСф=-4º; КУР1=178º; КУР2=198º; λр=22º; λс=25º; φср=60º;Wф=250 км/ч; t1=15.24; t2=15.38. Рассчитать ИК, ФИПУ, σ, ИПС1, ИПС2, tпр, Sпр.
Решение.
1) Находим ИК: ИК=МК+(± ΔМ)=130º+(+7º)=137º;
Определяем ФИПУ: ФИПУ=ИК+(± УСф)=137º+(-4º)=133º;
Рассчитываем σ по формуле или на НЛ:
σ=( λр-λс)·sin φср=(22º-25º)·sin60º=-3º·0.85=-2,7≈-3º
Находим ИПС1 и ИПС2:
ИПС1=ИК+КУР1±180º+(±σ)=137º+178º-180º+(-3º)=132º
ИПС1=ИК+КУР2±180º+(±σ)=137º+198º-180º+(-3º)=152º
Определяем tпр: tпр= t2- t1=15.24-15.38=14 мин;
Рассчитываем Sпр по формуле или на НЛ:
S_пр=(W_ф×t_пр)/60=(250×14)/60=58;
Определение МВС с помощью боковой ПРС прокладкой ИПС2 и расстояния на карте.
Для определения МВС данным способом необходимо настроить АРК на ближайшую ПРС:
1. Во время Т1 снимаем КУР1. Когда КУР измениться на величину примерно 25о во время Т2 снимаем КУР2;
2. Определяем ∆t=Т2-Т1;
3. Находим Sпр=W∆t или Sпр=V∆t;
4. Определяем ИПС2=МК+(±∆М)+КУР2±180+(±σ);
5. Определяем α=∆КУР=|КУР1-КУР2|;
6. Определяем Sпрс на НЛ-10:

7. Прокладываем на карте ИПС2 и Sпрс, отмечая на карте МВС в момент времени Т2.
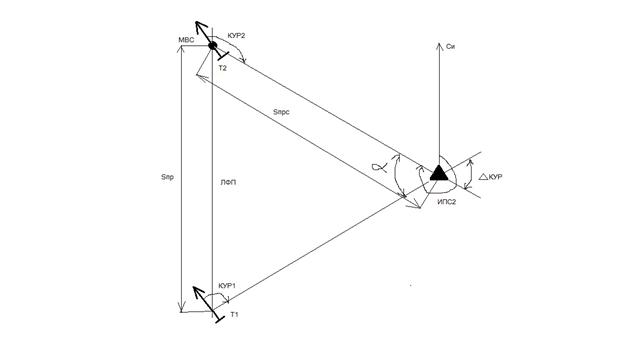
Рис. 42 Определение МВС с помощью боковой ПРС прокладкой ИПС2 и расстояния на карте.
Заключение
В результате выполнения квалификационной работы были получены следующие основные результаты:
1. Исследованы теоретические возможности применения автоматического радиокомпаса ADF DA 40 NG при выполнении полета по маршруту.
2. Рассмотрены различные варианты выполнения полета по маршруту с использованием ADF.
3. Рассмотрен практический пример использования автоматического радиокомпаса ADF DA 40 NG.
Радиоэлектронное и приборное оборудование активно используется экипажем на всех этапах полёта самолёта. Это оборудование является сложным техническим комплексом, имеет широкие функциональные возможности, обеспечивает высокую надёжность в условиях перегрузок, вибраций, резких перепадов температуры, влажности и давления. В связи с этим возрастают требования к качеству эксплуатации радиоэлектронного и приборного оборудования и его технического обслуживания.
Несмотря на наличие современных систем спутниковой навигации (GPS, ГЛОНАСС) на борту современных ВС, которые также обеспечивают экипажи необходимой информацией при полете по маршруту, рассмотренные выше способы использования ADF, применяются и будут применяться для решения задач СВЖ. Так как при выполнении полёта необходимо комплексное использование навигационных бортовых систем, для обеспечения высокого уровня безопасности и эффективности полёта.
Условные обозначения
Точки и линии:
МС — место самолета
ИПМ — исходный пункт маршрута
ППМ — поворотный пункт маршрута
КО — контрольный ориентир
КЭ — контрольный этап
ЛЗП — линия заданного пути
ЛФП — линия фактического пути
АЛП — астрономическая линия положения
РНТ — радионавигационная точка
ОПРС — отдельная приводная радиостанция
РСБН — радиотехническая система ближней навигации
Направления, углы и координаты:
С — север
Ю — юг
В — восток
3 — запад
Си — северное направление истинного меридиана
См — северное направление магнитного меридиана
Ск — северное направление компасного меридиана
Си.о — северное направление истинного опорного меридиана
См.о — северное направление магнитного опорного меридиана
ЗИПУ — заданный истинный путевой угол
ЗМПУ — заданный магнитный путевой угол
ФИПУ — фактический истинный путевой угол
ФМПУ — фактический магнитный путевой угол
ОЗИПУ — ортодромический заданный истинный путевой угол
ОЗМПУ — ортодромический заданный магнитный путевой угол
ИК — истинный курс
МК — магнитный курс
КК — компасный курс
МКр — магнитный курс расчетный
МКср — магнитный курс средний
МКсл — магнитный курс следования
МКвых — магнитный курс выхода на ЛЗП
ОИК — ортодромический истинный курс
ОМК — ортодромический магнитный курс
Δк — девиация компаса
Δр — радиодевиация
Δм — магнитное склонение
Δ — вариация
УС — угол сноса
УСр — угол сноса расчетный
УСф — угол сноса фактический
БУ — боковое уклонение в градусах
ДП — дополнительная поправка в курс
ПК — поправка в курс
δ — направление ветра метеорологическое, отсчитанное от магнитного меридиана
НВ — направление ветра навигационное, отсчитанное от магнитного меридиана
УВ — угол ветра
УВcр — угол ветра средний
ОРК — отсчет радиокомпаса
КУР — курсовой угол радиостанции
КУРвых — курсовой угол радиостанции выхода
КУРсл — курсовой угол радиостанции следования
КУРпредв — курсовой угол радиостанции предвычисленныи
КУО — курсовой угол ориентира
МПО — магнитный пеленг ориентира
ИПР — истинный пеленг радиостанции
МПР — магнитный пеленг радиостанции
ИПС — истинный пеленг самолета
МПС — магнитный пеленг самолета
ОП(ЩДМ) — обратный пеленг
ПП(ЩДР) — прямой пеленг
ИП (ЩТЕ) — истинный пеленг
А — азимут
МУК — магнитный угол карты
УР — угол разворота
Увых — угол выхода
ВУ — вертикальный угол
β — угол крена
σ — поправка на угол схождения меридианов
φ — широта пункта
λ — долгота пункта
Δλ — разность долгот
Скорости, высоты и линейные величины:
Vи — истинная воздушная скорость
Vпр — скорость приборная
VпрКУС — скорость по узкой стрелке КУС
W — путевая скорость .
Vв — вертикальная скорость
U — скорость ветра
S — расстояние между двумя точками
S тр — расстояние траверза
S наб — расстояние набора высоты
S сн— расстояние снижения
S р.в — расстояние рубежа возврата
ЛБУ — линейное боковое уклонение
ЛУР — линейное упреждение разворота
R — радиус разворота
ГД — горизонтальная дальность
НД — наклонная дальность
Ни — истинная высота
Нпр — приборная высота
Нб — барометрическая высота
Но — относительная высота
Набс — абсолютная высота
Н760 — условно барометрическая высота
Нподх — высота подхода
Нотх — высота отхода
Нсн — высота снижения
Нэш — высота эшелона
Н760без — безопасная высота по давлению 760 мм рт. ст.
Нприв. без — безопасная высота по приведенному минимальному давлению
Haэр, без — безопасная высота по давлению аэродрома
МБВ — минимальная безопасная высота
ВПР — высота принятия решения
Нр — абсолютная высота точки рельефа
На эр — высота аэродрома относительно уровня моря
ΔНр — превышение наивысшей точки относительно аэродрома
ΔН — инструментальная поправка высотомера
ΔНt — методическая температурная поправка высотомера
ΔНа — аэродинамическая поправка высотомера
ΔНб — поправка к высотомеру за барический рельеф
ΔV — инструментальная поправка указателя воздушной скорости
ΔVа — аэродинамическая поправка указателя воздушной скорости
ΔVсж — поправка к указателю скорости на сжимаемость воздуха
ΔV t — методическая температурная поправка указателя скорости
Время и метеорологические элементы:
Т — момент времени
t — отрезок времени
Р0— атмосферное давление у земли
Раэр — атмосферное давление на аэродроме
Ри — атмосферное давление на высоте
Рприв. мин — минимальное атмосферное давление на данном участке трассы,
приведенное к уровню моря
t 0 — температура у земли
t н — температура на высоте
t пр — показание термометра на высоте полета
t ср — температура средняя
t град — вертикальный температурный градиент
Список использованной литературы:
1. Сарайский Ю.Н., Алешков И.И. Аэронавигация. Часть I. Основы
навигации и применение геотехнических средств: Учебное пособие.-СПб:СПбГУГА, 2010,302 с;
2. Сарайский Ю.Н., Липин А.В., Либерман Ю.И. Аэронавигация. Часть II. Радионавигация в полете по маршруту: Учебное пособие. /Университет ГА.С-Петербург,2013, 298 с;
3. Черный М.А., Кораблин В.И. “Самолетовождение” Изд. 2-е перераб. и доп., М., “Транспорт”, 1977г;
4. Самолетовождение. Сборник задач по курсу СВЖ для курсантов летчиков и штурманов. Михайленко А.А., СВВАУЛШ, 1987г;
5. Статовский В.П., Конспект лекций «Воздушная навигация».
6. Лушников, А. С. Радиоэлектронное и приборное оборудование самолёта DA 40 NG и его лётная эксплуатация : учеб. пособие / А. С. Лушников. – Ульяновск : УВАУ ГА(И), 2013. – 154 с.
7. Авиационная радионавигация: Справочник./ А.А. Сосновский, И.А. Хаймович, Э.А. Лутин, И. Б. Максимов; Под ред. А.А. Сосновского. – М.: Транспорт, 1990. – 264с.
Дата добавления: 2018-06-01; просмотров: 942; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!