Расчет времени маневра расхождения с группой целей
После проигрывания маневра рассчитываем время расхождения (  ) с каждой целью отдельно используя их новые ОЛОДы. Точки "5" получаем способом указанным ранее. Из полученных выбираем наибольшее, т.е. по цели имеющей наименьшую относительную скорость лимитирующей время расхождения со всеми остальными. Это и будет время маневра расхождения со всей группой целей. Однако, каждая из не лимитирующих целей по времени маневра расхождения будет продолжать двигаться по ОЛОДу до тех пор пока судно-наблюдатель не возвратиться к своим первоначальным параметрам движения. Следовательно, их точки "5" переместятся от расчетных ранее, на некоторое расстояние по ОЛОДу в соответствии с лимитирующим временем маневра расхождения. Новые точки "5" надо учитывать при возврате судна-наблюдателя к своим первоначальным параметрам.
) с каждой целью отдельно используя их новые ОЛОДы. Точки "5" получаем способом указанным ранее. Из полученных выбираем наибольшее, т.е. по цели имеющей наименьшую относительную скорость лимитирующей время расхождения со всеми остальными. Это и будет время маневра расхождения со всей группой целей. Однако, каждая из не лимитирующих целей по времени маневра расхождения будет продолжать двигаться по ОЛОДу до тех пор пока судно-наблюдатель не возвратиться к своим первоначальным параметрам движения. Следовательно, их точки "5" переместятся от расчетных ранее, на некоторое расстояние по ОЛОДу в соответствии с лимитирующим временем маневра расхождения. Новые точки "5" надо учитывать при возврате судна-наблюдателя к своим первоначальным параметрам.
Дистанция отхода от первоначального курса, при маневре изменением курса рассчитывается описанным ранее способом по "лимитирующей цели" по углу отворота.
Применяя маневр безопасного расхождения методом изменения курса, следует учитывать что:
а) любое увеличение угла между курсом цели и судна-наблюдателя приводит к увеличению относительной скорости и наоборот;
б) маневр изменением курса может быть существенно ограничен в применении в ситуациях когда:
• судно-наблюдатель находится в положении обгоняемого;
• судно-наблюдатель не располагает достаточным водным пространством;
• судно-наблюдатель находится в зоне с интенсивным движением;
• когда существуют неопределенности в действиях цели;
в) при наличии достаточного водного пространства маневр является наиболее эффективным, а его многовариантность позволяет решать задачи расхождения в различной их постановке (с минимально возможным изменением курса, в кратчайшее время, в максимальном удалении и т.д.).
К положительным качествам маневра следует отнести:
• высокую степень эффективности,
• многовариантность,
• незначительные затраты времени на исполнение,
• при существенных изменениях курса хорошая различимость на экране РЛС.
К отрицательным качествам маневра следует отнести:
• необходимость наличия достаточного пространства;
• зависимость его от взаиморасположения судов.
Примечания:
1. Задачи безопасного расхождения маневром изменения курса решаются в предположении неизменности элементов движения судна-цели без учета инерционных свойств судна-наблюдателя.
2. Если, при необходимости отворота вправо, на траверзе имеется отметка справа объекта мешающего этому отвороту, необходимо уменьшить ход (вплоть до минимального), а затем, пропустив судно справа, лечь на необходимый курс с увеличением скорости до изначальной.
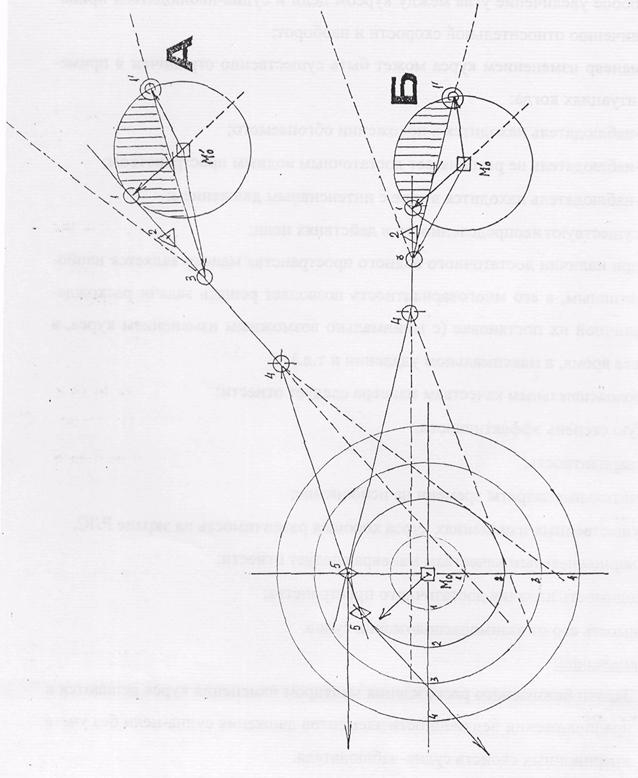
Рисунок 10. Расчет маневра безопасного расхождения изменением курса.
3. Обязательным этапом обработки РЛ информации является глазомерная оценка ситуации на ИКО РЛС. Такая оценка осуществляется после обнаружения эхо-сигнала, она предшествует РЛ прокладке и не прекращается до полного расхождения. При большом количестве эхо-сигналов целей, глазомерная оценка позволяет отобрать для прокладки опасные и потенциально опасные. Для оценки примерного направления цели (ее ракурс) необходимо иметь навыки мысленного построения треугольников скоростей у следов послесвечения цели.
4. Маневр безопасного расхождения будет эффективным, если учтено: взаимное расположение целей относительно собственного судна, наличие свободной акватории для маневрирования, требования МППСС-72 и лимитирующая цель.
5. Выбирая маневр по расхождению с судном-целью, никогда нельзя быть уверенным в том, что это судно-цель само не предпримет какого-либо маневра. Поэтому судоводитель должен уметь, при решении задачи учитывать влияние маневра судна-цели на изменение обстоятельств расхождения. В этом случае новый треугольник скоростей строится на новом установившемся пути движения эхо-сигнала цели с учетом 6-минутного интервала и нового вектора нашего. Затем этот треугольник переносится в точку  .
.
Расчет маневра безопасного расхождения изменением скорости (рис. 11)
Графические построения выполняются в обычной последовательности и преследуют ту же цель - построение изначального треугольника скоростей, как основы для расчета маневра.
Построив изначальные треугольники скоростей, и рассчитав параметры движения целей, определяем время упреждения и наносим точку "4" на ЛОД. Строим СОК способом указанным ранее с вершиной в точке упреждения и равный ему в точке "3", но противоположно направленный до пересечения с КМВ. Это касается всех целей. Отрезок вектора  , пересеченный границей сектора, от точки пересечения до точки
, пересеченный границей сектора, от точки пересечения до точки  определяет объем маневров скоростью от возможного до полной остановки движения.
определяет объем маневров скоростью от возможного до полной остановки движения.
На рисунке 11 приведены два варианта маневра. Вариант с объектом "А" выполним минимальным уменьшением скорости. Вариант "Б" выполнен полной остановкой движения.
Очень важно, чтобы точка "1" находилась на одной из границ СОК, в противном случае, эхо-сигнал цели не пойдет по заранее рассчитанному ОЛОДу. Следует обратить внимание на то, чтобы рассчитанная скорость была достигнута не позднее достижения эхо-сигналом цели точки упреждения.
При расхождении с одиночной целью определенные при построении значения маневра является готовым к применению.
При продолжении решения этой задачи для безопасного расхождения с группой целей, значение маневра определяется лимитирующей целью расхождение с которой требует наименьшего уменьшения скорости судном-наблюдателем. При этом приемлемость этого маневра для остальных целей следует проверить (проиграть) с каждой из них.
"Проигрывание маневра"
Эта операция производится путем подстановки вектора скорости лимитирующей цели в первоначальные векторные треугольники скоростей других целей. После соединения точек '' 1' " с точками "3" получим новые векторные треугольники скоростей, где векторы "1' " - "3" являются новыми относительными скоростями маневра расхождения.
Следует отметить, что вектор  новый всегда будет меньше изначального вектора , а при векторе =0, равен вектору
новый всегда будет меньше изначального вектора , а при векторе =0, равен вектору  . Это необходимо помнить при расхождении с целью, в случае остановки нашего движения.
. Это необходимо помнить при расхождении с целью, в случае остановки нашего движения.
Т.к. векторы новые в своем продолжении есть ОЛОДы, то перенеся их с учетом направления в точку "4" определим  для каждой цели. Если
для каждой цели. Если 
 задача решена с положительным результатом, если же указанное неравенство не выполняется расчет маневра сделан неверно.
задача решена с положительным результатом, если же указанное неравенство не выполняется расчет маневра сделан неверно.
Расчет производится также, как и при маневре изменения курса. При решении такого вида задач  от изначального курса отсутствует.
от изначального курса отсутствует.
В любом случае применение маневра скоростью должно быть тщательно оценено и проверено, т.к. его использование подвержено значительным ограничениям. В том числе:
- если вектор полностью расположен в пределах СОК, то применение маневра невозможно;
- если КМВ полностью расположен в пределах в СОК, то маневр изменением скорости невозможен;
- если маневрирующее судно находится в положении обгоняемого, то применение маневра может быть опасно;
- если граница сектора опасных курсов проходит через центр КМВ, то маневр скоростью однозначен - остановка движения;
- выполнение маневра изменением скорости требует больших затрат времени и это должно быть непременно учтено при назначении времени упреждения;
- следует учитывать, что при сближении с носовых курсовых углов уменьшение скорости судном-наблюдателем приводит к увеличению
 , а следовательно к уменьшению временной опасности; при сближении с кормовых курсовых углов - к уменьшению , а следовательно увеличению временной опасности;
, а следовательно к уменьшению временной опасности; при сближении с кормовых курсовых углов - к уменьшению , а следовательно увеличению временной опасности; - в любом случае маневр изменением скорости следует предпринимать тщательно сообразуя это действие с МППСС-72 и конкретной ситуацией. К маневру увеличения скорости следует прибегать только в крайнем случае.
К положительным сторонам маневра изменение скорости следует отнести:
· маневр изменением скорости не требует наличия дополнительного водного пространства, а потому может широко применяться в стесненных водах;
· при значительном сокращении скорости маневра хорошо различим как на планшете, так и непосредственно на экране индикатора кругового обзора;
· техника графических расчетов проста и наглядна.
К отрицательным сторонам маневра изменением скорости следует отнести:
• инерционность судна при уменьшении скорости, вследствие чего он выполняется долго и не может считаться эффективным;
• существенное ухудшение управляемости на период подтормаживания из-за того, что руль расположен в струе от винта.
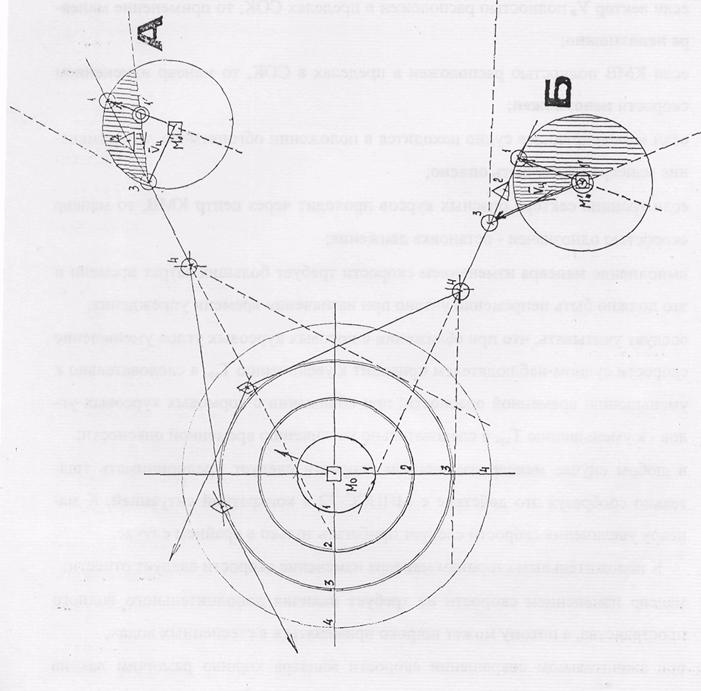
Рисунок 11. Расчет маневра безопасного расхождения изменением скорости.
Расчет маневра безопасного расхождения одновременным изменением кyрca и скорости (рис. 12)
В практике судовождения могут возникнуть ситуации, когда применение маневра расхождения изменением только курса или только скорости будут по тем или иным причинам нежелательны или даже невозможны. Можно привести много примеров таких ситуаций:
- при плавании вблизи сильно изрезанной береговой черты,
- при наличии отдельно лежащих навигационных опасностей,
- наличие зоны действия рыболовного флота, зон интенсивного движения и т.д., что не позволяет маневрировать изменением курса, а метеоусловия или гидрологическая обстановка района плавания и наконец технические возможности механической установки не позволяют установить рассчитанную скорость.
В таких случаях судоводитель, сообразуясь с обстановкой, может применить метод расхождения одновременным изменением курса и скорости. При этом определяющим параметром может быть как курс, так и скорость движения, реже то и другое вместе.
Каждому значению курса соответствует определенное значение скорости, как и каждому значению скорости - свое определенное значение курса.
На рисунке 12 приведены примеры расчета маневра расхождения одновременным изменением курса и скорости с каждым объектом "А" и "Б" раздельно.
С объектом "А" расхождение изменением только скорости невозможно. Прокладываем линию курса из точки до пересечения с границей сектора. Вектор скорости в минимальном ее значении определяется отрезком - 1', который в масштабе выражает значение величины скорости.
В случае расчета маневра с объектом "Б" лимитирующим является уровень скорости (например, по причине не надежной управляемости из-за сильного дрейфа или течения). В этом случае раствором циркуля, равным уровню скорости из точки делаем засечку на границе сектора опасных курсов. Полученную таким образом точку " 1' " соединяем с точкой и получаем значение курса.

Рисунок 12. Расчет маневра безопасного расхождения одновременным изменением курса и скорости.
При расхождении с группой целей способом одновременного изменения курса и скорости необходимо выбирать лимитирующую цель по каждому параметру отдельно или вместе в зависимости от складывающейся обстановки и "проигрывать" маневр описанным ранее способом.
Установив значение курсов и скоростей до прихода эхо-сигналов целей в точки упреждения, осуществляем расхождение в заданной дистанции. Эти маневры не являются однозначными. Весь объем маневров одновременным изменением курса и скорости выражается площадью круга маневренных возможностей (точнее сказать частью круга маневренных возможностей) расположенной вне пределов сектора опасных курсов, образованной после построения СОК.
К положительным качествам маневра одновременным изменением курса и скоростью относятся:
- многовариантность;
- простое выполнение на планшете.
К отрицательным качествам маневра одновременным изменением курса и скорости относятся:
- почти не используется на практике из-за инерционности судна при уменьшении скорости;
- существенное ухудшение управляемости на период подтормаживания из-за расположения руля в струе винта.
Одним из путей сокращения времени решения задач безопасного расхождения является сокращение объема вспомогательных графических построений, затемняющих рисунки, сокращение времени набора информации и ее обработки (включающей в себя глазомерную оценку тенденции разворота ЛОДов на ИКО РЛС) и глазомерный выбор и обоснование маневра для расхождения в заданной дистанции как на маневренном планшете так и ИКО РЛС.
Расчет маневра безопасного расхождения с группой целей (рис. 13)
(ускоренный вариант)
В практике судовождения нередко возникают ситуации, когда возникает необходимость расхождения одновременно с несколькими судами. При этом реальная опасность, а, следовательно, и необходимость расхождения может быть вызвана одной или двумя целями, а остальные будут потенциально опасными.
Выполнение графических построений в обычном порядке при каждой цели, а затем сравнение полученных результатов и выбор по ним вида маневра расхождения, привело бы к значительным затратам времени, что всегда нежелательно. Именно это обстоятельство вызывает необходимость применения иных подходов, которые позволили бы сократить время, затрачиваемое на решение задачи. Последовательность действий в этом случае можно_свести к следующему:
1. Путем мысленного построения треугольников скоростей у следов послесвечения цели на ИКО РЛС определяем тенденцию разворота ЛОДов, на основании чего определяем опасную цель (если  < - то цель опасная).
< - то цель опасная).
2. Из этого же треугольника скоростей воспроизводим в пространственном воображении существующую ситуацию и выбираем вид и величину маневра. Последующая графическая прокладка служит для проверки безопасности выбранного маневра и уточнения его величины.
3. Подстановкой значения маневра в треугольники каждой не лимитирующей цели определяем его приемлемость.
4. Производим построение вновь образованных треугольников и определяем новые векторы относительной скорости каждой из них, который в споем продолжении является ОЛОДом.
5. Выполняем параллельный перенос ОЛОДов в точки "4" в направлении стрелки.
6. Рассчитываем время расхождения для каждой цели и определяем лимитирующую по времени расхождения.
7. На ОЛОД каждой из не лимитирующих целей, начиная от точки "4", наносим плавание за время расхождения и определяем точку "5" – точку возвращения судна-наблюдателя к первоначальным параметрам движения.
8. Продолжаем вести постоянный контроль перемещения целей, оценивая одновременно эффективность предпринятого маневра и, при необходимости, вносим коррективы.
9. Прекратить систематические наблюдения можно при условии выполнения требований изложенных в МППСС-72, т.е. пока опасное судно не будет окончательно пройдено и оставлено позади (10-15 градусов позади траверза)
Примечания:
1. При выборе маневра необходимо учитывать:
- взаимное расположение судов относительно собственного;
- наличие акватории для маневрирования;
- учет требований МППСС-72.
2. Необходимо помнить, что при выборе эффективного маневра самыми главными аргументами являются угол разворота ЛОД и величина относительной скорости ( ).
3. Надо помнить о том, что истина находится на экране РЛС - планшет его помощник.
4. Для того чтобы маневр был эффективным он, в соответствие с МППСС-72 и хорошей морской практикой, должен быть заблаговременным, своевременным, решительным, заметным для других судов, ведущих РЛ радиолокационное наблюдение и целенаправленным, т.е. логичным и понятным.
5. Измерение дуг между точками "1'' - ''1' " не только позволяет быстро определить "лимитирующую" цель, но и быстро произвести "проигрывание маневра".
6. Лимит времени расхождения определяется по максимуму его значения.
7. Уровень подготовки и натренированности, умение правильно вести прокладку и анализировать ее, выполнять расчеты с минимальными затратами времени и применять их имеют решающее значение в обеспечении безопасного расхождения.
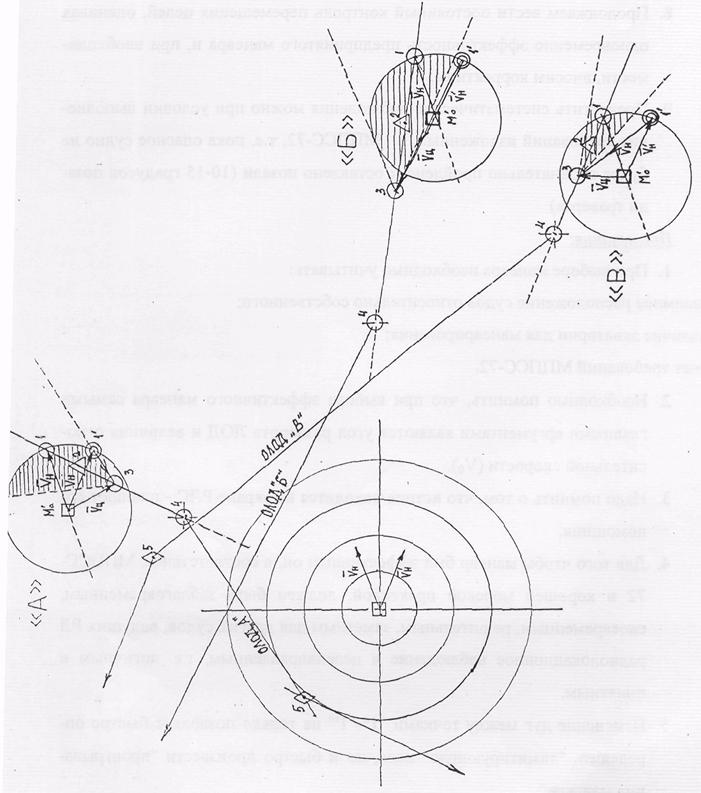
Рисунок 13. Расчет маневра безопасного расхождения с группой целей
Частные случаи решения задач расхождения
В практике судовождения возникают случаи, когда одна из сторон треугольника выражена точкой в графике и нулем в числовом выражении скорости.
К таким случаям следует отнести:
А - неподвижно судно-цель =0. В треугольнике скоростей точка “ ” совпадает с точкой "3", т.к. графически вектор цели выражен точкой.
В - неподвижно судно-наблюдатель =0. В треугольнике скоростей точка “ ” совпадает с точкой "1".
С - вектор относительного перемещения =0. В треугольнике скоростей точки "1" и "3" совмещены и, следовательно, они совмещены с точкой “ ”. Сама цель являет собой сателлит.
Безусловно, треугольники скоростей имеют необычный графический вид. Тем не менее, все элементы треугольников имеют место, порядок их построений и закономерности сохраняются неизменными.
Рассмотрим решение задач безопасного расхождения применительно к перечисленным выше случаям:
А - в этом случае вектор относительного перемещения абсолютно равен и противоположен вектору . После выполнения всех обычных построений становится очевидным, что курс на расхождение в заданной дистанции определяет отрезок -"1' ". Отсюда следует, что векторы неподвижных объектов всегда параллельны курсу судна наблюдателя и направлены в противоположную сторону.
В - в этом случае вектор скорости судна наблюдателя графически выражен точкой, а потому точка "1" совпадает с точкой . Выполнив обычные построения, получаем сектор опасных относительных курсов с вершиной в точке "3". Значением курса на расхождение с минимальным значением скоростью является направление перпендикуляра, проведенного из точки к одной из границ СОК, а величина скорости соответствует линейной величине отрезка перпендикуляра в масштабе. Эту скорость необходимо развить до истечения времени расхождения, а поэтому в такой ситуации машина должна находиться в постоянной готовности к работе.
Случай "С" рассмотрен ранее (стр. 35, 36).
а)

б)
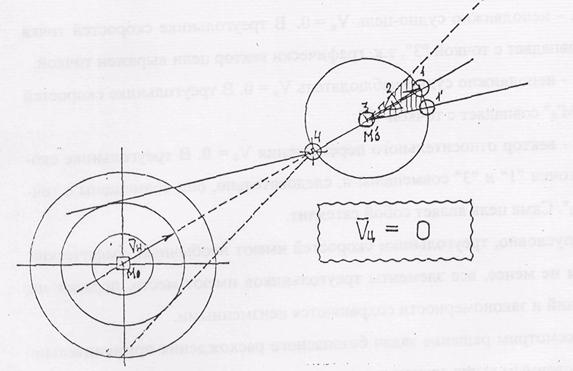
Рисунок 14. а) Расчет расхождения с неподвижной целью;
б) Расчет расхождения не имеющим хода судном-наблюдателем.
ПРИЛОЖЕНИЕ
Дата добавления: 2018-06-27; просмотров: 765; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!