Полная радиолокационная информация
Полная радиолокационная информация - есть сумма объективных характеристик, определяющих ситуацию сближения, степень опасности объектов, уровень срочности принятия необходимых мер и включает следующие элементы:
 - дистанция кратчайшего сближения - расстояние между нашим судном и судном-целью в момент кратчайшего сближения. Определяется величиной перпендикуляра, опущенного из центра планшета на ЛОД цели. Измеряется целыми и десятыми долями мили.
- дистанция кратчайшего сближения - расстояние между нашим судном и судном-целью в момент кратчайшего сближения. Определяется величиной перпендикуляра, опущенного из центра планшета на ЛОД цели. Измеряется целыми и десятыми долями мили.
 - время кратчайшего сближения - время движения судна от точки "3" до точки кратчайшего сближения (другими словами - до точки на ЛОДе, в которую опущен перпендикуляр из центра планшета). Измеряется в минутах.
- время кратчайшего сближения - время движения судна от точки "3" до точки кратчайшего сближения (другими словами - до точки на ЛОДе, в которую опущен перпендикуляр из центра планшета). Измеряется в минутах.
 - дистанция, в которой происходит пересечение курса нашего судна судном-целью или курса судна-цели нашим судном. Определяется расстоянием, измеренным от центра планшета до точки пересечения. Измеряется в целых и десятых долях мили. Имеет два решения:
- дистанция, в которой происходит пересечение курса нашего судна судном-целью или курса судна-цели нашим судном. Определяется расстоянием, измеренным от центра планшета до точки пересечения. Измеряется в целых и десятых долях мили. Имеет два решения:
1) ЛОД проходит у нас по носу. равна расстоянию от центра планшета до точки пересечения ЛОДом нашего курса.
2) ЛОД проходит у нас по корме. В этом случае, для определения , из центра планшета проводим линию, параллельную вектору цели до пересечения с ЛОДом. Величина равна расстоянию от центра планшета до точки, в которой находилась цель в момент пересечения ее курса нашим судном.
 - время пересечения курсов. Выражает степень временной опасности. Определяется промежутком времени, за который эхо-сигнал цели пройдет расстояние от точки "3" до точки пересечения. Измеряется в минутах по ЛОД цели.
- время пересечения курсов. Выражает степень временной опасности. Определяется промежутком времени, за который эхо-сигнал цели пройдет расстояние от точки "3" до точки пересечения. Измеряется в минутах по ЛОД цели.
 - курс цели. Снимается из треугольника скоростей. Измеряется в градусах.
- курс цели. Снимается из треугольника скоростей. Измеряется в градусах.
 - скорость цели. Снимается из треугольника скоростей. Измеряется в целых и десятых долях мили.
- скорость цели. Снимается из треугольника скоростей. Измеряется в целых и десятых долях мили.
 - заданная дистанция безопасного расхождения, представляющая собой допустимое минимальное расстояние в момент кратчайшего сближения, назначаемое судоводителем с учетом геометрических размеров судна, навигационной обстановки и условий видимости. Рекомендуется в открытом море равной 2 милям, в стесненных водах от 0,5 до 1мили. В особых случаях рассчитывается отдельно.
- заданная дистанция безопасного расхождения, представляющая собой допустимое минимальное расстояние в момент кратчайшего сближения, назначаемое судоводителем с учетом геометрических размеров судна, навигационной обстановки и условий видимости. Рекомендуется в открытом море равной 2 милям, в стесненных водах от 0,5 до 1мили. В особых случаях рассчитывается отдельно.
Примечание:
(опасная зона) включает в себя 4 составляющих:
- расстояние, достаточное для выполнения нашим судном дополнительного маневра или остановки движения в случае неблагоприятного маневра цели, проходящей в ;
- расстояние, гарантирующее обнаружение неблагоприятного маневра цели;
- расстояние, учитывающее возможные погрешности в определении ;
- расстояние, учитывающее возможные погрешности в определении .
 - заданное безопасное время расхождения. Представляет собой время от точки поворота на курс расхождения в точке "4" до выхода на прежний курс в точке "5".
- заданное безопасное время расхождения. Представляет собой время от точки поворота на курс расхождения в точке "4" до выхода на прежний курс в точке "5".
 - дистанция отхода от линии первоначального курса. Представляет собой расстояние, на которое смещается наше судно относительно линии первоначального курса в результате выполнения маневра для расхождения с изменением скорости.
- дистанция отхода от линии первоначального курса. Представляет собой расстояние, на которое смещается наше судно относительно линии первоначального курса в результате выполнения маневра для расхождения с изменением скорости.
Для нахождения работаем с векторами нашим новым (  ) и вектором нашим (
) и вектором нашим (  ) построенным при центре планшета в масштабе 1:10. От центра планшета по линии вектора нашего нового откладываем отрезок равный произведению нашей скорости ( ) на время (
) построенным при центре планшета в масштабе 1:10. От центра планшета по линии вектора нашего нового откладываем отрезок равный произведению нашей скорости ( ) на время (  ). Конец полученного отрезка обозначаем буквой d.
). Конец полученного отрезка обозначаем буквой d.
Из точки d отпускаем перпендикуляр на линию первоначального курса (  ) или его продолжения. Длина этого перпендикуляра равна , измеряется в целых и десятых долях мили в масштабе принятом ранее.
) или его продолжения. Длина этого перпендикуляра равна , измеряется в целых и десятых долях мили в масштабе принятом ранее.
 - упрежденная точка (точка 4) - это точка на ЛОДах судов-целей, в которых они будут находится в момент, когда наше судно закончит маневрирование для расхождения и будет следовать с новыми назначенными параметрами движения. С учетом набора информации (6 мин.), решение задачи (3 мин.) и выполнение эффективного маневра (3 мин.) рекомендуется назначать на 12 минуте.
- упрежденная точка (точка 4) - это точка на ЛОДах судов-целей, в которых они будут находится в момент, когда наше судно закончит маневрирование для расхождения и будет следовать с новыми назначенными параметрами движения. С учетом набора информации (6 мин.), решение задачи (3 мин.) и выполнение эффективного маневра (3 мин.) рекомендуется назначать на 12 минуте.
СОК - сектор опасных курсов.
КМВ - круг маневренных возможностей.
Расчет и в различных ситуациях сближения приведен на рисунке 2.
Расчет , и в различных ситуациях сближения приведен на рисунке 3.

Рисунок 2. Расчет и в различных ситуациях сближения.
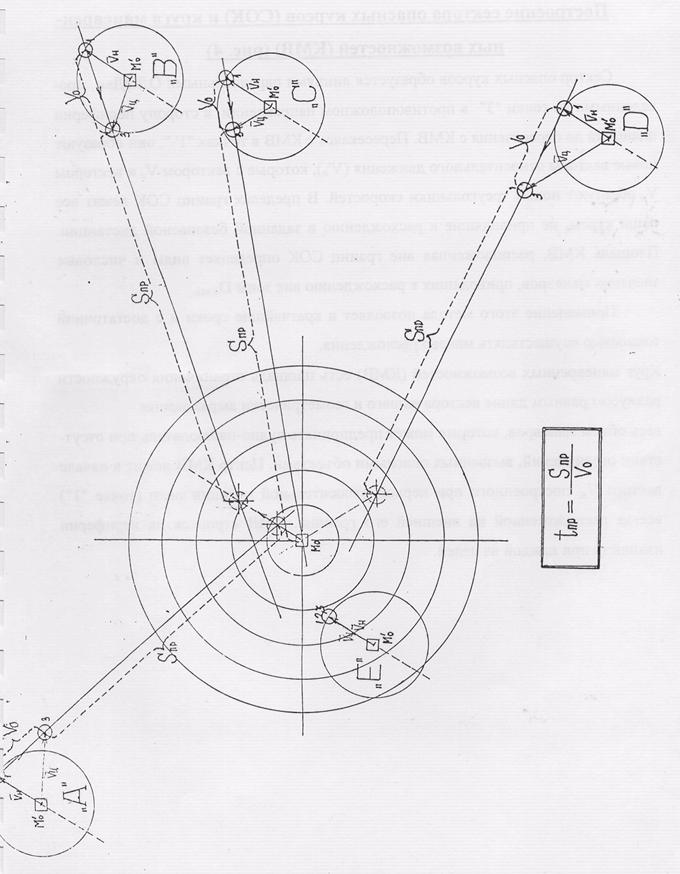
Рисунок 3. Расчет и в различных ситуациях сближения.
Построение сектора опасных курсов (СОК) и круга маневренных возможностей (КМВ) (рис. 4)
Сектор опасных курсов образуется линиями параллельными ОЛОДам, проведенными из точки "3" в противоположном направлении, в сторону периферии планшета до пересечения с КМВ. Пересекаясь с КМВ в точках " 1' ", они образуют новые векторы относительного движения (  ), которые с вектором и вектором образуют новые треугольники скоростей. В пределах границ СОК лежат все наши курсы, не приводящие к расхождению в заданной безопасной дистанции. Площадь КМВ, расположенная вне границ СОК определяет виды и числовые значения маневров, приводящих к расхождению вне зоны .
), которые с вектором и вектором образуют новые треугольники скоростей. В пределах границ СОК лежат все наши курсы, не приводящие к расхождению в заданной безопасной дистанции. Площадь КМВ, расположенная вне границ СОК определяет виды и числовые значения маневров, приводящих к расхождению вне зоны .
Применение этого метода позволяет в кратчайшие сроки и с достаточной точностью осуществлять маневр расхождения.
Круг маневренных возможностей (КМВ) есть площадь окружности ограниченной радиусом равным длине вектора нашего и геометрически выражающая весь объем маневров, которые может предпринять судно-наблюдатель при отсутствии ограничений, вызванных опасными объектами. Центр КМВ лежит в начале вектора , построенного при первой относительной позиции цели (точке "1") всегда расположенной на внешней его границе. КМВ строится на периферии планшета при каждой из целей.
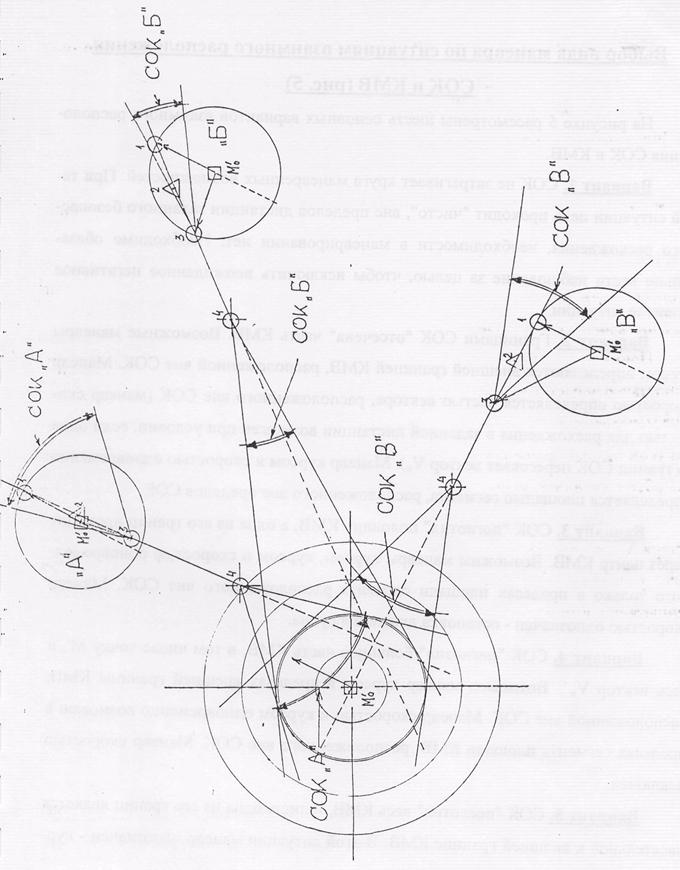
Рисунок 4. Построение КМВ и СОК.
Дата добавления: 2018-06-27; просмотров: 1276; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!