III. Классификация систем автоматического управления.
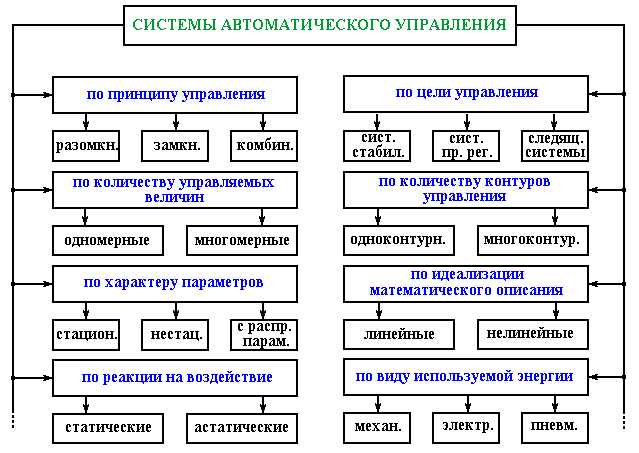
Рисунок 16
1. По способу управления различают три основных типа САУ:
а) Системы программного управления – это системы, у которых задание U известно заранее, как функция времени U(t). Самый распространенный пример таких систем – системы программного автоматического управления технологическим оборудованием;
б) Системы адаптивного управления – это системы, которые способны приспосабливаться (адаптироваться) к изменяющимся или заранее не известным условиям своего функционирования, а так же улучшать свою работу по мере накопления опыта путем автоматического изменения алгоритмов управления;
в) Системы интеллектуального управления – это системы, алгоритм управления которых построен на основе методов искусственного интеллекта. Такие системы являются наиболее совершенными по своим функциональным возможностям, стремясь приблизиться к возможностям человека.
Разомкнутые и замкнутые системы.
В разомкнутых САУ выходная величина объекта Y не измеряется, т.е. нет контроля за состоянием объекта. Разомкнутыми такие системы называются потому, что в них отсутствует обратная связь между выходом и входом управляющего устройства. При наличии обратной связи объект и управляющее устройство образуют замкнутый контур.
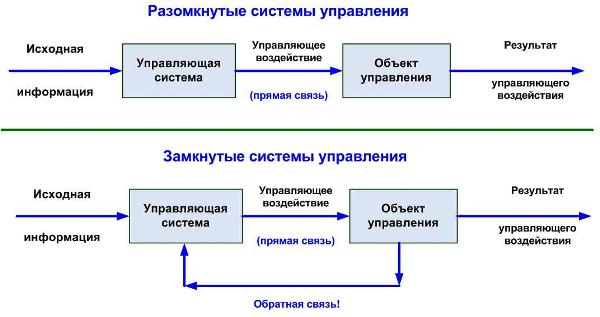
Рисунок 16
Возможны разомкнутые САУ, в которых управляющее устройство измеряет только одно задающее воздействие, одно возмущение или обе эти величины одновременно. В первом варианте (измеряется одно задающее воздействие) разомкнутой САУ управление осуществляется по задающему воздействию: поступающие извне команды U приводят путем изменения управляющего воздействия X к соответствующему изменению выходной величины объекта Y. Точность обеспечиваемого при этом соответствия между U и Y целиком определяется постоянством параметров системы, и возмущения никак не контролируются. Поэтому практически такие системы пригодны лишь при достаточно высокой стабильности условий работы системы и невысоких требованиях к точности управления.
|
|
|
Вторым вариантом разомкнутой САУ (измеряется одно возмущающее воздействие) является система автоматического управления по возмущению (система автоматической компенсации). Такие системы находят применение, в частности, когда задача управления сводится к поддержанию постоянства выходной величины объекта.
Наиболее полным видом разомкнутой САУ является третий вариант (измеряются одновременно возмущающее и задающее изменения) – система управления по задающему и возмущающему воздействиям. В этом случае управление объектом осуществляется в функции двух величин U и Z. Здесь объединены оба предыдущих варианта разомкнутых систем.
|
|
|
Принцип компенсации возмущения позволяет существенно повысить точность разомкнутых САУ. Однако, она все же остается невысокой, во-первых, вследствие невозможности охватить компенсацией все возмущения, действующие на систему (в том числе и на управляющее устройство). Во-вторых, из-за изменения во времени параметров объекта и управляющего устройства. Поэтому разомкнутые САУ нашли применение только при невысоких требованиях к точности управления.
В замкнутых САУ на вход управляющего устройства подаются задающее воздействие U и выходная величина объекта Y. Исходя из величины Y, управляющее устройство определяет соответствующее требуемое значение Y и, имея информацию о текущем значении Y, обеспечивает путем воздействия на объект необходимое соответствие между Y и U. ВтакихСАУ управляющее устройство стремится ликвидировать все отклонения Y от его значения, определяемого заданием U. Происходит это независимо от причин, вызвавших отклонения, включая любые возмущения, внешние и внутренние помехи и изменения параметров системы.
Замкнутые САУ называются еще системами с обратной связью или системами управления по отклонению.
|
|
|
Эти системы могут обеспечить принципиально неограниченную точность управления и представляют собой основной тип САУ.
Комбинированные САУ представляют собой объединение в одну систему замкнутой системы управления по отклонению и разомкнутой системы управления по внешнему воздействию. Добавление к замкнутой системе управления разомкнутой системы компенсации влияния на выходную величину объекта какого-либо возмущения облегчает задачу замкнутой САУ и тем самым позволяет упростить ее и повысить точность управления.
Лучшее качество управления в комбинированных системах объясняется тем, что в них наиболее полно используется информация об объекте и внешней ситуации.
Следящие системы.
Частным видом систем автоматического управления являются следящие системы. В отличие от систем регулирования (стабилизация выходной величины на заданном уровне) у следящих систем задающее воздействие не постоянно, а изменяется по заранее неизвестному закону. Задающее воздействие поступает на систему извне, и задачей системы является обеспечение слежения выходной величиной объекта за изменяющейся величиной так, чтобы все время поддерживалось равенство выходной величины управляющему воздействию.
Дата добавления: 2018-05-12; просмотров: 1110; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!