Б) Регуляторы по отклонению (ошибке).
Системы регулирования по отклонению (рисунок 10) имеют обратную связь, с помощью которой передается информация о выходных параметрах на элемент сравнения. Элемент сравнения формирует сигнал рассогласования (ошибка), равный ε = u – y, который поступает в автоматический регулятор. Таким образом, при регулировании по отклонению информация на регулятор поступает в виде отклонения.
Рисунок 10
Основная задача регулирования состоит в выполнении равенства выходной величины и управляющего воздействия. Чем точнее оно выполняется, тем выше качество САР. По этой причине естественно оценивать САР ошибкой ε.
Для идеальной САР эта ошибка равняется нулю. Для реальных САР ошибка ε отлична от нуля и, следовательно, необходимо уменьшить ее допустимые пределы. Идея, лежащая в основе этого принципа,состоит в измерении ошибки. Исходя из ее знака и величины, формируется регулирующее воздействие, обеспечивающее изменение y(t), в сторону (в зависимости от знака) уменьшения ошибки. Τᴀᴋᴎᴍ обᴩᴀᴈᴏᴍ, обеспечивается изменение регулируемой величины y(t) по требуемому закону. При ε больше нуля регулирующее воздействие должно увеличивать y(t), а при ε меньше нуля уменьшать.
При ε=0 регулирующий орган должен оставаться неподвижным. В общем случае для определения ошибки используются три элемента:
ЗЭ - задающий элемент.
ЧЭ - чувствительный элемент.
|
|
|
СЭ - сравнивающий элемент.
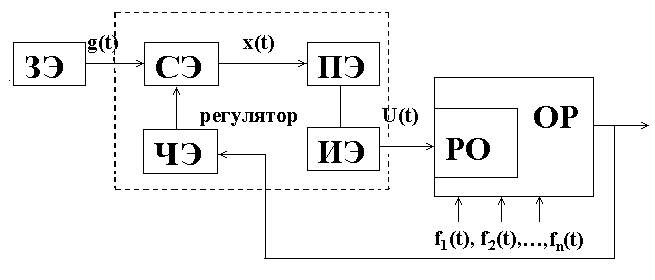
Рисунок 10
Электрический сигнал является универсальным. Его легко измерить, преобразовать и подать на вход исполнительного устройства. Рассмотрим устройство и принцип работы электрических аналоговых регуляторов, предшественников современных цифровых систем управления. В качестве измерительного устройства в таких регуляторах служит датчик, преобразующий любую физическую величину (температуру, давление, частоту вращения, расход жидкости или газа и т.д.) в электрический сигнал. Выходной сигнал измерительного устройства поступает на инверсный вход устройства сравнения, на положительный вход которого подается требуемое значение электрического сигнала (установка). Чтобы правильно определить величину установки, необходимо знать коэффициент преобразования измерительного устройства – статическую характеристику этого датчика. Сигнал рассогласования E (отклонение измеренного сигнала от требуемого значения) подается в устройство управления на обработку.
Задающее устройство (ЗЭ) служит для формирования g(t), чувствительный элемент (ЧЭ) служит для измерения регулируемой величины y(t), сравнивающий элемент (СЭ) служит для выделения ошибки x(t). Тогда функциональная схема САР, реализующая принцип регулирования по ошибки имеет следующий вид:
|
|
|
Промежуточный элемент может включать в себя: преобразователь импульсных сигналов в непрерывные, усилитель,, корректирующее устройство. В простейшем случае ИЭ, ПЭ могут отсутствовать. Основным преимуществом САР работающей по этому принципу перед рассмотренной ранее, является способность выполнять задачу регулирования при любом количестве возмущаемых воздействий f1(t), f2(t), … ,fn(t). Вторым преимуществом САР является отсутствие жестких требований к стабильности характеристик регулятора и объекта регулирования.
При этом это не относится к ЧЭ, СЭ, ЗЭ так как они принимают участия в выявлении ошибки x(t). К стабильности этих характеристик предъявляются жесткие требования так как точности работы САР обуславливается точностью с которой измеряется ошибка.
Τᴀᴋᴎᴍ ᴏϬᴩᴀᴈᴏᴍ, САР,работающая по ошибке лишена базовых недостатков САР работающих по возмущению. По этой причине принцип регулирования по ошибке является основным при построении регулятора. Преимущество этих систем обусловлено тем, что они являются системами с обратной связью, причем связь отрицательна, так как g(t)-y(t).
|
|
|
При этом эти системы также не лишены недостатков. Такие системы имеют склонность к колебаниям. По этой причине расчет их значительно сложнее, чем расчет систем с регулированием по возмущению.
Лишены указанных недостатков для систем двух типов, комбинированные системы, в которых используется оба принципа регулирования.
В) Регуляторы по возмущению.
Регулирование по возмущению используется в случае, когда на ход технологического процесса оказывают влияние внешние воздействия, которые изменяются произвольно и независимо от технологического процесса. Для упреждения влияния возмущающего параметра на объект строится система регулирования (рисунок 11), в которой величина возмущающего сигнала сравнивается с номинальным значением, и ошибка рассогласования подается на регулятор. Однако данная система не лишена недостатков:
– отсутствует информация о результатах воздействия;
– необходимо строить столько систем регулирования, сколько существует возмущений.
Рисунок 11
Для технической реализации в состав САР должны входить устройства позволяющие измерить возмущающие воздействия и устройства, предназначенные для создания регулирующего воздействия на объект регулирования:
|
|
|
1. Чувствительные элементы ЧЭ (датчики).
2. Исполнительные элементы ИЭ.
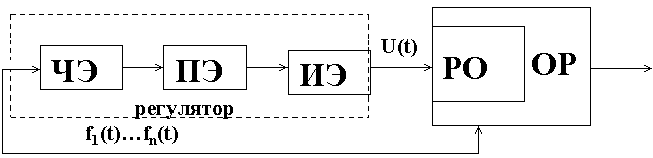
Рисунок 12
Исполнительный элемент представляет собой мощное механическое, электромеханическое, пневматическое, гидравлическое устройство. Между ЧЭ и ИЭ могут быть включены промежуточные элементы ПЭ, усилитель мощности, преобразователи сигнала, и др.
Достоинство таких систем - простота, но в силу указанных недостатков системы этого типа для решения задач регулирования самостоятельно не применяются. Обычно они используются в качестве составной части более сложных комбинированных систем управления. В более простых, чем САР, системах этот принцип широко распространен (например, автоматическая сигнализация).
По комбинированному принципу(рисунок 13), т.е. при совместном использовании принципов регулирования по отклонению и возмущению.
Рисунок 13
При таком регулировании удается получить высококачественные системы, в которых влияние основного возмущения нейтрализуется регулятором, работающим по принципу возмущения, а влияние других возмущений – регулятором, реагирующим на отклонение значения регулируемой величины от заданного значения.
В зависимости от того, по какому алгоритму будет обрабатываться сигнал, различают основные законы регулирования.
Законы регулирования это математические алгоритмы, в соответствии с которыми в системе управления по отклонению сигнал ошибки слежения (отклонение), преобразуется в сигнал управления, подаваемый на исполнительный механизм САУ или непосредственно на объект управления, если ИМ и РО включены в состав модели последнего. Законы регулирования позволяют САУ решать возложенные на нее задачи: осуществлять слежение и стабилизацию с требуемым качеством. Наиболее часто используются на практике регуляторы, реализующие П-, ПИ- и ПИД- законы регулирования (пропорциональный, пропорционально-интегральный и пропорционально – интегрально - дифференциальный).
По виду используемой энергии: электрические, пневматические, гидравлические и другие;

Рисунок 14(пневматический регулятор)
2) по виду регулируемой величины: температуре, давлению, уровню, перемещению и т.д.;

Рисунок 15(регулятор температуры)
3) по характеру воздействия на объект управления: непрерывные, дискретные;

Рисунок 13 (дискретный регулятор громкости)
4) по алгоритму функционирования: стабилизация, слежение, адаптация, программный алгоритм.

Рисунок 14
А также регуляторы различают по конструктивному исполнению и законам управления. По конструктивному исполнению регуляторы могут быть приборные, аппаратные, модульные (элементные) и агрегатные (блочные).

Рисунок 15(регулятор приборный)
Дата добавления: 2018-05-12; просмотров: 1271; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!