ЧАСТОТНОЕ УПРАВЛЕНИЕ АД ПРИ СТАБИЛИЗАЦИИ АБСОЛЮТНОГО СКОЛЬЖЕНИЯ.
Если учесть (1) параметрическое уравнение идеализированного АД, управляемого по закону Костенко (2) примет следующий вид:


В установившемся режиме работы электромагнитный момент двигателя  равен статическому
равен статическому  , тогда из (2):
, тогда из (2): 
Из (3) находим абсолютное скольжение двигателя (4):


| Следовательно, абсолютное скольжение будет постоянным. Если поддерживать  неизменным, то режим работы АД будет близок к режиму управления (5) неизменным, то режим работы АД будет близок к режиму управления (5)
|
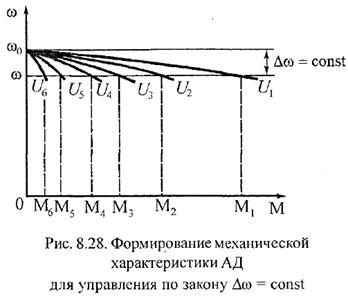
Скорость АД находится следующим образом (6): 
При  и данном
и данном  скорость АД будет постояннойпри изменении нагрузки, поскольку каждому значению моментаM соответствует своя величина напряженияU.
скорость АД будет постояннойпри изменении нагрузки, поскольку каждому значению моментаM соответствует своя величина напряженияU.
Рассмотрим функциональную схему реализации частотного управления при , которая соответствует следующим соотношениям:

| где  -заданное значение угл. скорости АД, -заданное значение угл. скорости АД,
 - заданное абс. скольжение - заданное абс. скольжение
 -заданное значение синхр. угл. скорости АД, которое определяет задающую частоту -заданное значение синхр. угл. скорости АД, которое определяет задающую частоту  . .
|

В данной системе с помощью датчика скорости ДС измеряется угл. скорость двигателя  , которая сравнивается с заданным значением . Их разность направляется в ПИ-регулятор скорости РС, выходная величина которого
, которая сравнивается с заданным значением . Их разность направляется в ПИ-регулятор скорости РС, выходная величина которого  суммируется с заданным падением скорости
суммируется с заданным падением скорости  , формируя заданное значение синхронной угловой скорости и соответственно частоты . Функциональный преобразователь ФП на основе информации о номинальном значении ЭДС
, формируя заданное значение синхронной угловой скорости и соответственно частоты . Функциональный преобразователь ФП на основе информации о номинальном значении ЭДС  , номинальном моменте (или номинальном токе), текущем статическом моменте (или токе статора) формирует в соответствии с (5) значение статора
, номинальном моменте (или номинальном токе), текущем статическом моменте (или токе статора) формирует в соответствии с (5) значение статора  , которая суммируется с падением напряжения
, которая суммируется с падением напряжения  , определяя выходное напряжение U преобразователя частоты ПЧ. В установившемся режиме
, определяя выходное напряжение U преобразователя частоты ПЧ. В установившемся режиме  и механические характеристики АД соответствуют (6)
и механические характеристики АД соответствуют (6)
|
|
|
СКАЛЯРНОЕЧАСТОТНО-ТОКОВОЕ УПРАВЛЕНИЕ АД
При частотно-токовом управлении (ЧТУ) асинхронным двигателем управляющими величинами являются частота f1 и величина тока I1 статора. В разомкнутых системах ЧТУ (рис.1) частота f1.3 и величина тока статора I1,3 задаются независимо. В разомкнутой системе ЧТУ асинхронный двигатель работает с переменным магнитным потоком, следствием чего является снижение критического момента и значительное увеличение электромагнитной постоянной времени АД. Поэтому разомкнутые системы ЧТУ находят ограниченное применение при незначительном изменении статического момента. Для устранения недостатков, присущих разомкнутым системам ЧТУ, создают замкнутые системы, где магнитный поток стабилизируется или изменяется по определенному закону при изменении нагрузки.

Чтобы стабилизировать магнитный поток двигателя, необходимо заданное значение тока статора I1,З изменять при изменении нагрузки (абсолютного скольжения sa) по закону :

|
|
|
В целях упрощения реализации функцию I = F(sa) иногда линеаризуют, как показано штриховыми линиями.


Для расширения диапазона регулирования скорости АД применяют обратную связь по скорости (рис. 8.33).

В системе ЧТУ для каждой фазы задаются мгновенные значения синусоидальных токов статора, которые отрабатываются быстродействующими регуляторами тока, включающими компаратор с гистерезисом КГ (рис. 8.34). Амплитуда этих токов регулируется в соответствии с рассмотренными структурами ЧТУ
Отслеживание заданной кривой тока осуществляется с точностью, определяемой верхней и нижней границами (рис. 8.34, б). Недостатком этой функциональной схемы является переменная частота коммутации силовых ключей преобразователя частоты ПЧ. При заданных границах колебания тока можетоказаться, что частота коммутации ключей ПЧ превышает допустимую. Из-за неопределенности максимальной частоты переключений в схеме отслеживания тока возникают проблемы выбора силовых ключей. Поэтому применяют другую схему (рис. 8.35), где частота коммутации ключей постоянная. Она определяется частотой сигнала пилообразного напряжения, которое вычитается из напряжения выходного сигнала ПИ-регулятора тока РТ. Разность этих сигналов поступает на компаратор без гистерезиса КБГ.
|
|
|

Дата добавления: 2018-04-15; просмотров: 550; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!