ОПТИМАЛЬНОЕ ПЕРЕДАТОЧНОЕ ЧИСЛО РЕДУКТОРА
Теория электропривода
1.1. ПРИВЕДЕНИЕ МОМЕНТОВ СОПРОТИВЛЕНИЯ И СИЛ, МОМЕНТОВ ИНЕРЦИИ И
1.2. УЧЕТ ПОТЕРЬ В ПЕРЕДАЧАХ
1.3. ОПТИМАЛЬНОЕ ПЕРЕДАТОЧНОЕ ЧИСЛО РЕДУКТОРА
1.4. МЕХАНИЧЕСКИЕ ПЕРЕХОДНЫЕ ПРОЦЕССЫ ПРИ ЛИНЕЙНОМ ДИНАМИЧЕСКОМ МОМЕНТЕ
1.5. ВРЕМЯ РАЗГОНА И ТОРМОЖЕНИЯ ЭП
1.6. ВЛИЯНИЕ ПАРАМЕТРОВ НА СВОЙСТВА И ХАРАКТЕРИСТИКИ ДПТ НВ
1.7. ТОРМОЗНЫЕ РЕЖИМЫ ДПТ НВ
1.8. СТАТИЧЕСКИЕ МЕХАНИЧЕСКИЕ И ЭЛЕКТРОМЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ДПТ ПВ
1.9. МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ АД
1.10. ТОРМОЗНЫЕ РЕЖИМЫ РАБОТЫ АСИНХРОННОГО ДВИГАТЕЛЯ
1.11. ЭЛ.МЕХ. ПЕРЕХ. ПРОЦЕССЫ ПРИ НАБРОСЕ И СБРОСЕ НАГРУЗКИ ЭП
1.12 МЕХАНИЧЕСКИЕ ПЕРЕХОДНЫЕ ПРОЦЕССЫ ЭЛЕКТРОПРИВОДА С ЛИНЕЙНОЙ МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИКОЙ ПРИ ЛИНЕЙНОМ ЗАДАНИИ СКОРОСТИ ИДЕАЛЬНОГО ХОЛОСТОГО ХОДА.
1.13 ПОТЕРИ МОЩ. В УСТАНОВИВШИХСЯ РЕЖ. РАБ. НЕРЕГ. ЭП
1.14. ПОТЕРИ МОЩНОСТИ В УСТАНОВИВШИХСЯ РЕЖИМАХ РЕГУЛИРУЕМЫХ ЭЛЕКТРОПРИВОДАХ.
1.15. ПОТЕРИ ЭНЕРГИИ В ПЕРЕХОДНЫХ ПРОЦЕССАХ ЭЛЕКТРОПРИВОДОВ ПРИ ПОСТОЯННОЙ ВЕЛИЧИНЕ СКОРОСТИ ИДЕАЛЬНОГО ХОЛОСТОГО ХОДА ЭЛЕКТРОДВИГАТЕЛЯ( Ω0=CONST)
1.16 ПОТЕРИ ЭНЕРГИИ В ПП ЭП ПРИ ЛИНЕЙНОМ ИЗМЕНЕНИИ СКОРОСТИ ИДЕАЛЬНОГО ХОЛОСТОГО ХОДА ω0
1.17. КПД И КОЭФФИЦИЕНТ МОЩНОСТИ НЕРЕГУЛИРУЕМОГО ЭЛЕКТРОПРИВОДА
1.18. К.П.Д РЕГУЛИРУЕМОГО ЭЛЕКТРОПРИВОДА
1.19 НАГРЕВ И ОХЛАЖДЕНИЕ ЭЛЕКТРОДВИГАТЕЛЕЙ.
1.20. ВЫБОР МОЩНОСТИ ЭД ДЛЯ ПРОДОЛЖИТЕЛЬНОГО РЕЖИМА РАБОТЫ С НЕИЗМЕННОЙ НАГРУЗКОЙ. (РЕЖИМ S1).
1.21. ВЫБОР МОЩНОСТИ ЭЛЕКТРОДВИГАТЕЛЕЙ ДЛЯ ПРОДОЛЖИТЕЛЬНОГО РЕЖИМА РАБОТЫ С ПЕРЕМЕННОЙ НАГРУЗКОЙ (РЕЖИМЫ S6 – S8).
1.22.ВЫБОР МОЩНОСТИ ЭД ДЛЯ ПОВТОРНО-КРАТКОВРЕМЕННОГО РЕЖИМА.
1.23.РЕГУЛИРОВАНИЕ СКОРОСТИ АД В СИСТЕМЕ РН-АД
1.24. PЕОСТАТНОЕ РЕГУЛИРОВАНИЕ СКОРОСТИ АСИНХРОННОГО ДВИГАТЕЛЯ С ФАЗНЫМ РОТОРОМ
1.25.ЧАСТОТНОЕ РЕГУЛИРОВАНИЕ СКОРОСТИ ИДЕАЛИЗИРОВАННОГО АД ПО ЗАКОНУ КОСТЕНКО
1.26. ЧАСТ. УПР. АД ПО ЗАКОНУ СТАБ. ПОТОКОСЦ. СТАТ. (Ψ1 = CONST).
1.27. ЧАСТОТНОЕ УПРАВЛЕНИЕ АД ПО ЗАКОНУ СТАБИЛИЗАЦИИ ПОТОКОСЦЕПЛЕНИЯ ВЗАИМОИНДУКЦИИ (ΨM = CONST)
1.28. ЧАСТОТНОЕ УПРАВЛЕНИЕАД ПО ЗАКОНУ СТАБИЛИЗАЦИИПОТОКОСЦЕПЛЕНИЯ РОТОРА ψ2=CONST.
1.29. ЧАСТОТНОЕ УПРАВЛЕНИЕ АД ПРИ СТАБИЛИЗАЦИИ АБСОЛЮТНОГО СКОЛЬЖЕНИЯ.
1.30. СКАЛЯРНОЕЧАСТОТНО-ТОКОВОЕ УПРАВЛЕНИЕ АД
ПРИВЕДЕНИЕ МОМЕНТОВ СОПРОТИВЛЕНИЯ И СИЛ, МОМЕНТОВ ИНЕРЦИИ И МАСС К ВАЛУ ЭД
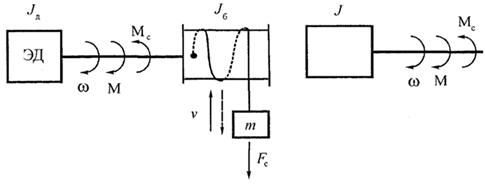
Многомассовая система (рис. 1а) приводится к одномассовой системе (рис. 1б), имеющей суммарный J, Мс, угловую скорость ω и угол поворота вала φ.
При вращательном движении механизма:

На основании закона сохранения энергии (при допущении КПДпередачи = 1):

При поступательном движении механизма:

Для линейных передаточных механизмов (j=const, ρ=const) рассмотрим приведения моментов инерции и масс к валу электродвигателя. При вращательном движении исполнительного механизма и идеальном ПМ кинетическая энергия неприведенной системы должна равняться кинетической энергии приведенной системы:
 ,
,
Для поступательного движения исполнительного механизма:

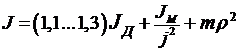
В общем случае момент инерции ЭП, приведенный к валу ЭД:
УЧЕТ ПОТЕРЬ В ПЕРЕДАЧАХ
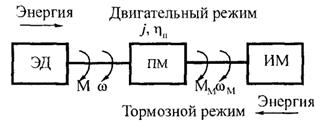 Для двигательного режима работы:,
Для двигательного режима работы:,
 ,
,  ,
,
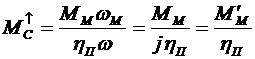
Для тормозного режима работы:
 ,
,  , Но КПД
, Но КПД  зависит от постоянных и переменных потерь в передаче. Определим потерю момента в передаче для двигательного режима
зависит от постоянных и переменных потерь в передаче. Определим потерю момента в передаче для двигательного режима  ,Примем допущение, в тормозном режиме такая же потеря момента.
,Примем допущение, в тормозном режиме такая же потеря момента.  . 1)
. 1)  , тогда
, тогда  , что соответствует тормозному режиму. тормозной спуск;2)
, что соответствует тормозному режиму. тормозной спуск;2)  , тогда
, тогда  , что соответствует двигательному режиму. силовой спуск.
, что соответствует двигательному режиму. силовой спуск.
Потери момента в передаче приближенно определяются:  ,
,
2.Уточненный метод учета потерь в передаче
Рассмотрим сначала установившийся режим работы. Для двигательного установившегося режима имеем:  ,
,  , Для тормозного установившегося режима
, Для тормозного установившегося режима  ,
, 
 ,Теперь перейдем к переходным режимам. Для двигательного режима в переходном процессе (разгон)
,Теперь перейдем к переходным режимам. Для двигательного режима в переходном процессе (разгон)
 ,
, 
 ,
,  ,
, 
 ,
,
Для тормозного режима в переходном процессе  ,
,
 ,
,  ,
,  ,
, 
 ,
,
ОПТИМАЛЬНОЕ ПЕРЕДАТОЧНОЕ ЧИСЛО РЕДУКТОРА
1. мин времени переходного процесса. Известно 
 ,ММ,wМ,JМ.
,ММ,wМ,JМ.
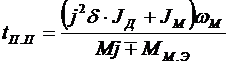
Время переходного процесса tП.П находим из основного уравнения движения электропривода  ,
, 
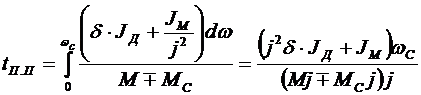
 ,
,  ,
,  ,
,  ,
,
 ,
,  откуда находим оптим
откуда находим оптим
2. Известно Рном, ММ, wМ, JМ. Принимая, что в переходных процессах М=сonst, а wс = wном

 ,
,  ,
,  ,
,  ,
,
 ,
,  . Единственной величиной, которую можно изменять является кинетическая энергия двигателя.
. Единственной величиной, которую можно изменять является кинетическая энергия двигателя. 
3. Исходя из веса редуктора
 ,
,  ,
,  ,
,  ,
,  ,
,  , Оптимальное передаточное число
, Оптимальное передаточное число  , доставляющее минимум веса комплекса, определяем из условия
, доставляющее минимум веса комплекса, определяем из условия 
Дата добавления: 2018-04-15; просмотров: 541; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!