Вопрос 2.Уравнения состояния
При решении некоторых задач ТАУ удобнее представлять дифференциальное уравнение объекта или дифференциальные уравнения системы в виде совокупности дифференциальных уравнений первого порядка.
Пусть объект описывается дифференциальным уравнением n-го порядка. (5.1)

Введем в рассмотрение n независимых переменных х1, х2,…,хn, называемых переменными состояния и представим уравнение (5.1) в виде системы дифференциальных уравнений (5.2)

Эти уравнения, как и уравнение (5.1), полностью характеризуют состояние объекта в любой момент времени и называются уравнениями состояния. Связь между переменными состояния и управляемой величиной y(t) устанавливается алгебраическим уравнением (5.3)

Обычно уравнения (5.2) и (5.3) записываются в векторно-матричной форме (5.4):

где А — матрица размером п*п ,  , m, с — матрицы-столбцы. Матрицу-столбец –
, m, с — матрицы-столбцы. Матрицу-столбец –  называют вектором состояния, хотя в общем случае не является вектором, так как его компоненты x1, х2,..., хn, могут иметь неодинаковые размерности.
называют вектором состояния, хотя в общем случае не является вектором, так как его компоненты x1, х2,..., хn, могут иметь неодинаковые размерности.
В выборе переменных состояния имеется определенная свобода. Важно только, чтобы они были независимыми. От того, как выбраны переменные, зависит форма уравнений (5.4), т. е. вид входящих в них матриц.
При нормальной форме уравнений состояния в качестве переменных состояния выбираются сама управляемая величина и п-1 ее производные:

Достоинством нормальной формы является то, что переменные состояния имеют ясный физический смысл, а некоторые из них (например, х1, х2 и х3) могут быть непосредственно измерены датчиками различных типов.
|
|
|
Для получения уравнений состояния в канонической форме уравнение объекта (5.1) представляется в виде (5.5)

Основной недостаток канонической формы состоит в том, что переменные состояния не имеют ясного физического смысла, в результате чего возникает проблема их непосредственного измерения.
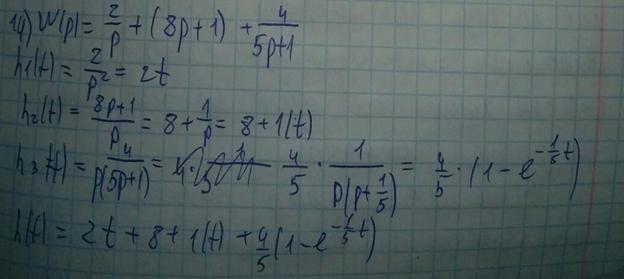
По передаточной функции системы найти ее реакцию на единичное ступенчатое воздействие (переходную функцию).

Билет №15.
Вопрос 1.Позиционные звенья. Колебательное звено.
Позиционными звеньями называются такие звенья, для которых в установившемся режиме характерна линейная зависимость между входной и выходной величинами.
Колебательное звено - звено любой физической природы, описываемое дифференциальным уравнением вида:

корни характеристического уравнения  должны быть комплексными, что будет выполняться при условии Т1< 2T2.
должны быть комплексными, что будет выполняться при условии Т1< 2T2.


Примером такого звена служит трехстепенной гироскоп, который используется для измерения угловых отклонений подвижных элементов.
|
|
|
Вопрос 2.Классификация автоматических систем по характеру внутренних динамических процессов.
Основными признаками деления автоматических систем на большие классы по характеру внутренних динамических процессов являются следующие:
1) непрерывность или дискретность (прерывистость) динамических процессов во времени,
2) линейность или нелинейность уравнений, описывающих динамику процессов регулирования.
По первому признаку автоматические системы делятся:
А) системы непрерывного действия,
Б) системы дискретного действия (импульсные и цифровые),
В) системы релейного действия.
По второму признаку каждый из указанных классов (кроме релейного) делится:
А) системы линейные,
Б) нелинейные.
Системы же релейного действия относятся целиком к категории нелинейных систем.
А) Системой непрерывного действия называется такая система, в каждом из звеньев которой непрерывному изменению входной величины во времени соответствует непрерывное изменение выходной величины. При этом закон изменения выходной величины во времени может быть произвольным, в зависимости от формы изменения входной величины и от вида уравнения динамики (или характеристики) звена.
|
|
|
Чтобы автоматическая система в целом была непрерывной, необходимо, прежде всего, чтобы статические характеристики всех звеньев системы были непрерывными.

Б) Системой дискретного действия называется такая система, в которой хотя бы в одном звене при непрерывном изменении входной величины выходная величина изменяется не непрерывно, а имеет вид отдельных импульсов, появляющихся через некоторые промежутки времени.

Импульсное звено - преобразует непрерывный входной сигнал в последовательность импульсов. Если последующее звено системы тоже дискретное, то для него не только выходная, но и входная величина будет дискретной (импульсной). К дискретным автоматическим системам относятся системы импульсного регулирования (т. е. системы с импульсным звеном), а также системы с цифровыми вычислительными устройствами.
В) Системой релейного действия называется такая система, в которой хотя бы в одном звене при непрерывном изменении входной величины выходная величина в некоторых точках процесса, зависящих от значения входной величины, изменяется скачком. Статическая характеристика релейного звена имеет точки разрыва.

А) Линейной системой называется такая система, динамика всех звеньев которой описывается линейными уравнениями (алгебраическими и дифференциальными или разностными). Для этого необходимо, прежде всего, чтобы статические характеристики всех звеньев системы были линейными, т. е. имели вид прямой линии (картинка 1, а и б).
|
|
|
Если динамика всех звеньев системы описывается обыкновенными линейными дифференциальными (и линейными алгебраическими) уравнениями с постоянными коэффициентами, то систему называют обыкновенной линейной системой.
Если в уравнении динамики какого-либо звена линейной системы имеется хотя бы один или несколько переменных во времени коэффициентов, то получается линейная система с переменными параметрами. Если какое-либо звено описывается линейным уравнением в частных производных (например, имеют место волновые процессы в трубопроводе или в электрической линии), то система будет линейной системой с распределенными параметрами.
Если динамика какого-либо звена системы описывается линейным уравнением с запаздывающим аргументом (т. е. звено обладает чисто временным запаздыванием или временной задержкой τ передачи сигнала (рис. 1.13)), то система называется линейной системой с запаздыванием.

Б) Нелинейной системой называется такая система, в которой хотя бы в одном звене нарушается линейность статической характеристики или же имеет место любое другое нарушение линейности уравнений динамики звена (произведение переменных или их производных, корень, квадрат или более высокая степень переменной, любая другая нелинейная связь переменных и их производных).
Следовательно, к нелинейным системам относятся, в частности, все системы, в звеньях которых имеются статические характеристики любого из многих видов (показанных на картинке 1, в – и). К ним же относятся и все системы релейного действия (картинка 3).
Нелинейными могут быть также и системы с переменными параметрами, с распределенными параметрами, с запаздыванием, импульсные и цифровые системы, если в них где-либо нарушается линейность уравнений динамики (в цифровых системах это связано, в частности, с квантованием сигнала по уровню).
Билет №16.
Вопрос 1.Позиционные звенья. Консервативное звено.
Определение позиционного звена в билете №15.
Консервативное звено (см. табл. 2.1, п. 5). Звено любой физической природы, работа которого описывается уравнением

называется консервативным звеном.


Любое колебательное звено можно считать консервативным, если в нем отсутствует элемент, поглощающий энергию колебаний (ε=0). Примером консервативного звена может быть колебательный контур LCпри отсутствии в нем активного сопротивления.
Вопрос 2.Уравнения состояния.
При решении некоторых задач ТАУ удобнее представлять дифференциальное уравнение объекта или дифференциальные уравнения системы в виде совокупности дифференциальных уравнений первого порядка.
Пусть объект описывается дифференциальным уравнением n-го порядка. (5.1)
Введем в рассмотрение n независимых переменных х1, х2,…,хn, называемых переменными состояния и представим уравнение (5.1) в виде системы дифференциальных уравнений (5.2)
Эти уравнения, как и уравнение (5.1), полностью характеризуют состояние объекта в любой момент времени и называются уравнениями состояния. Связь между переменными состояния и управляемой величиной y(t) устанавливается алгебраическим уравнением (5.3)
Обычно уравнения (5.2) и (5.3) записываются в векторно-матричной форме (5.4):
где А — матрица размером п*п , , m, с — матрицы-столбцы. Матрицу-столбец – называют вектором состояния, хотя в общем случае не является вектором, так как его компоненты x1, х2,..., хn, могут иметь неодинаковые размерности.
В выборе переменных состояния имеется определенная свобода. Важно только, чтобы они были независимыми. От того, как выбраны переменные, зависит форма уравнений (5.4), т. е. вид входящих в них матриц.
При нормальной форме уравнений состояния в качестве переменных состояния выбираются сама управляемая величина и п-1 ее производные:
Достоинством нормальной формы является то, что переменные состояния имеют ясный физический смысл, а некоторые из них (например, х1, х2 и х3) могут быть непосредственно измерены датчиками различных типов.
Для получения уравнений состояния в канонической форме уравнение объекта (5.1) представляется в виде (5.5)
Основной недостаток канонической формы состоит в том, что переменные состояния не имеют ясного физического смысла, в результате чего возникает проблема их непосредственного измерения.
3. Найти АЧХ АФХ по известной передаточной функции системы



Билет №17.
Вопрос 1.Интегрирующие звенья. Идеальное интегрирующее звено.
Интегрирующими называются звенья, работа которых описывается дифференциальным уравнением вида:

В интегрирующих звеньях в установившемся режиме имеет место линейная зависимость между входной величиной и производной выходной величины или, другими словами, выходная величина пропорциональна интегралу по времени от входной величины. В системах автоматического регулирования такие звенья используются для повышения порядка астатизма (свойство системы автоматического управления приводить ошибку регулирования к нулю при постоянном внешнем воздействии на данную систему).
Любое устройство, описываемое дифференциальным уравнением вида

называется идеальным интегрирующим звеном. Типичным интегрирующим звеном является операционный усилитель.
Передаточная функция идеального интегрирующего звена имеет

а временные характеристики определяются соотношениями:

Частотная передаточная функция

Амплитудная, фазовая и логарифмическая частотные характеристики запишутся соответственно так:

Вопрос 2.Передаточные функции систем автоматического управления.
Передаточной функцией звена по какому-либо внешнему воздействию называется отношение преобразования Лапласа выходной величины звена к преобразованию Лапласа рассматриваемого внешнего воздействия. При этом все другие внешние воздействия полагаются равными нулю, а преобразования Лапласа выходной величины и внешнего воздействия вычисляются при нулевых начальных значениях самих функций и их производных.
Из приведенного определения следует, что для любого звена с одной выходной величиной число передаточных функций равно числу внешних воздействий.

В частности, для звена, изображенного на рис. 2.1, можно ввести передаточную функцию по входной величине

и передаточную функцию по возмущению

Эта функция называется передаточной функцией звена в стандартной форме записи:

Передаточная функция линейного звена по какому-либо внешнему воздействию не зависит от закона изменения этого воздействия и определяется только свойствами самого звена.
Многочлен (2.89 – первая формула из 3х), фигурирующий в знаменателе передаточных функций звена, называется характеристическим полиномом этого звена, а уравнение

— характеристическим уравнением звена.

Корни многочлена, стоящего в знаменателе передаточной функции, называются полюсами этой передаточной функции; корни многочлена, стоящего в числителе передаточной функции - нулями этой передаточной функции.
В том случае, когда вещественные части всех полюсов передаточной функции отрицательны, т. е.

звено называется устойчивым. В устойчивых звеньях переходная составляющая выходной величины с течением времени затухает.
Билет №18.
Дата добавления: 2018-04-04; просмотров: 1510; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!