Методы возможных направлений.
Методы относятся к классу итеративных методов, в которых строится последовательность точек  , стремящихся к абсолютному экстремуму целевой функции
, стремящихся к абсолютному экстремуму целевой функции  на основании критерия оптимизации, т.е.
на основании критерия оптимизации, т.е.  ,
,  лучше, чем
лучше, чем  .
.
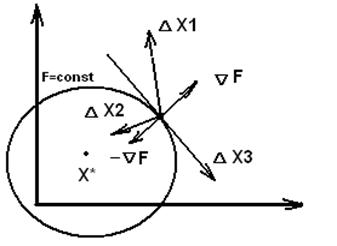 Суть методов возможных направлений заключается в том, что спуск от начального приближения
Суть методов возможных направлений заключается в том, что спуск от начального приближения  до абсолютного экстремума
до абсолютного экстремума  может осуществляться различными направлениями, называемыми возможными.
может осуществляться различными направлениями, называемыми возможными.
 - рост целевой функции
- рост целевой функции 
 - уменьшение
- уменьшение
 -
- 
 - возможные направления
- возможные направления
Вектор, ортогональный к касательной функции, указывающий направление роста целевой функции называется градиентом целевой функции.
 -градиент целевой функции
-градиент целевой функции
- - антиградиент является наилучшим из возможных направлений, указывающий путь наискорейшего убывания целевой функции.
Способы задания длины шага
 ,
,
где  - длина шага вдоль вектора
- длина шага вдоль вектора  ;
;
- направление спуска на К-ом шаге.
Все методы нелинейного программирования, основанные на данном соотношении можно разделить на 2 класса по способу задания длины шага:
1) Класс основан на постоянной длине шага 
Исходная длина шага задается примерно. Но при неудачно заданной длине шага может не выполняться критерий оптимизации, т.е.
 нарушение критерия оптимизации, отсюда следует
нарушение критерия оптимизации, отсюда следует
 ,
,
 ,
,
 .
.
Достоинством этих методов является малый объем вычислений на каждом шаге.
Недостатки – при неудачно заданных значениях длины шага q и  , возможно большое количество шагов оптимизации, и следовательно, большой объем вычислений.
, возможно большое количество шагов оптимизации, и следовательно, большой объем вычислений.
2) Класс - метод наискорейшего спуска
длина шага зависит от направления спуска  и вычисляется из условия наискорейшего убывания целевой функции
и вычисляется из условия наискорейшего убывания целевой функции


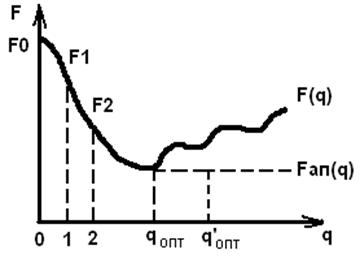
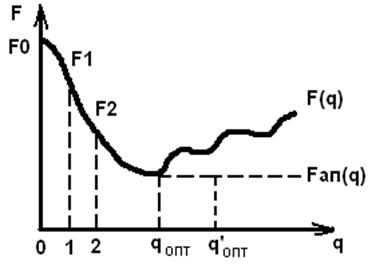
Для того, чтобы найти оптимальное значение длины шага  необходимо продифференцировать по длине шага и приравнять к нулю:
необходимо продифференцировать по длине шага и приравнять к нулю:
: 
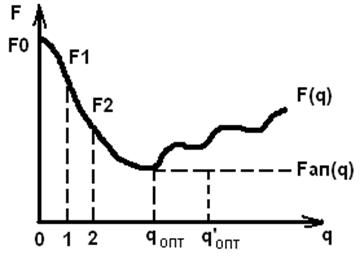
 - данная функция может быть нелинейной относительно q, и поэтому
- данная функция может быть нелинейной относительно q, и поэтому  аппроксимируют полиномом 2-ой степени
аппроксимируют полиномом 2-ой степени

 псевдооптимальная длина шага
псевдооптимальная длина шага 
Найти
 ?
? 

26. Применение метода наискорейшего спуска при решении задач оптимизации в электроэнергетике.
Метод наискорейшего спуска
Длина шага зависит от направления спуска  и вычисляется из условия наискорейшего убывания целевой функции
и вычисляется из условия наискорейшего убывания целевой функции
Для того, чтобы найти оптимальное значение длины шага необходимо продифференцировать по длине шага и приравнять к нулю:
:
 - данная функция может быть нелинейной относительно q, и поэтому аппроксимируют полиномом 2-ой степени
- данная функция может быть нелинейной относительно q, и поэтому аппроксимируют полиномом 2-ой степени
псевдооптимальная длина шага
Найти
?
27.Способ вычисления оптимальной длины шага вдоль заданного направления спуска при решении задач оптимизации в электроэнергетике.
 ,
,
где - длина шага вдоль вектора ;
- направление спуска на К-ом шаге.
Все методы нелинейного программирования, основанные на данном соотношении можно разделить на 2 класса по способу задания длины шага:
3) Класс основан на постоянной длине шага
Исходная длина шага задается примерно. Но при неудачно заданной длине шага может не выполняться критерий оптимизации, т.е.
нарушение критерия оптимизации, отсюда следует
,
,
.
Достоинством этих методов является малый объем вычислений на каждом шаге.
Недостатки – при неудачно заданных значениях длины шага q и , возможно большое количество шагов оптимизации, и следовательно, большой объем вычислений.
4) Класс - метод наискорейшего спуска
Длина шага зависит от направления спуска и вычисляется из условия наискорейшего убывания целевой функции
Для того, чтобы найти оптимальное значение длины шага необходимо продифференцировать по длине шага и приравнять к нулю:
 :
:
- данная функция может быть нелинейной относительно q, и поэтому аппроксимируют полиномом 2-ой степени
псевдооптимальная длина шага
Найти
?
28-29Применение метода покоординатной оптимизации в электроэнергетике. Внешний и внутренний циклы метода.
Метод покоординатной оптимизации относится к регулярным методам выбора направления. Суть алгоритма в том, что в кач-ве возможных направлений исп-ся орты исходной схемы координат.

Внутренний цикл
1ый шаг: изменение Х1
Х2 =соnst
. . .
Хn =соnst
Х1(1)= Х1(0)+q1оптl1
Х2(1)= Х2(0)+q2оптl2
. . .
Хn(1)= Хn(0)+qnоптln
 Частичная минимизация по всем N независимым переменным образуют полный внешний цикл. Кол-во повторений внутреннего цикла заранее не известно и определяется св-вами целевой функции и начальным приближением.
Частичная минимизация по всем N независимым переменным образуют полный внешний цикл. Кол-во повторений внутреннего цикла заранее не известно и определяется св-вами целевой функции и начальным приближением.
определение q1опт
ΔХ1(1)= Х1(1)-Х1(0)= q1опт*l1
ΔХ2(1)= Х2(1)-Х2(0)= q2опт*l2
Достоинства:простота реализации и малый объем вычислений на каждом шаге.
Недостатки:возможная неудовлетворительная сходимостьинеприемлемое число шагов.
Дата добавления: 2018-02-15; просмотров: 1481; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!