Импульсное реостатное регулирование скорости асинхронных двигателей с фазнымротором

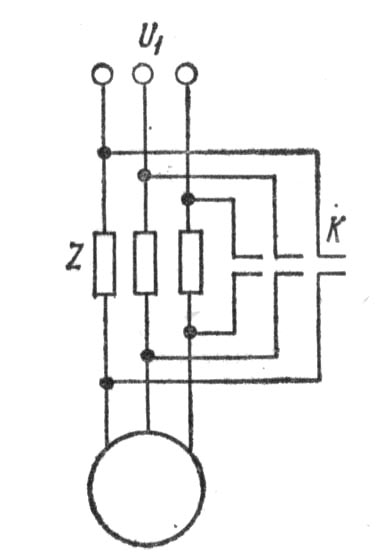 Импульсное регулирование скорости (рис.1) производится путем периодического включения двигателя в сеть и отключения его от сети или путем периодического шунтирования с помощью контактора К сопротивлений, включенных последовательно в цепь статора, или полупроводниковыхвентилей.
Импульсное регулирование скорости (рис.1) производится путем периодического включения двигателя в сеть и отключения его от сети или путем периодического шунтирования с помощью контактора К сопротивлений, включенных последовательно в цепь статора, или полупроводниковыхвентилей.
При этом двигатель беспрерывно находится в переходном режиме ускорения или замедления скорости вращения ротора и в зависимости от частоты и продолжительности импульсов работает с некоторой, приблизительно постоянной скоростью вращения. Подобное регулирование скорости применяется только для двигателей весьма малоймощности(рн <30-50вт).
Регулирование скорости вращения асинхронных двигателей с фазным ротором
Для двигателей с фазным ротором можно в принципе использовать все те же способы регулирования скорости вращения, как и для двигателей с короткозамкнутым ротором. Однако на практике из числа этих способов для двигателей с фазным ротором применяется только способ регулирования скорости вращения с помощью реакторов насыщения. Ниже рассмотрим способы регулирования скорости вращения, которые специфичны для двигателей с фазным ротором и в которых используется возможность включения регулирующих устройств во вторичную цепь.
Регулирование скорости вращения с помощью реостата в цепи ротора
Регулирование скорости вращения с помощью реостата в цепи ротора производится по той же схеме, что и реостатный пуск двигателя, но реостат при этом должен быть рассчитан на длительную работу. При увеличении активного сопротивления вторичной цепи вид механической характеристики двигателя изменяется
характеристика становится более мягкой и скольжение двигателя при том же моменте нагрузки Мст увеличивается.
При Мст = const рабочее скольжение s с большой точностью пропорционально sm и, следовательно, активному сопротивлению цепи ротора. Поэтому скольжения s и s', соответствующие случаям rд = 0 и  , находятся в соотношении
, находятся в соотношении
откуда значение rд, необходимое для получения скольжения s', равно
 Рассматриваемый способ регулирования скорости связан со значительными потерями энергии в сопротивлении rд и поэтому малоэкономичен.
Рассматриваемый способ регулирования скорости связан со значительными потерями энергии в сопротивлении rд и поэтому малоэкономичен.
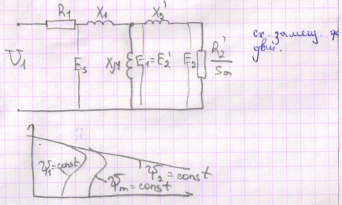
Разомкнутое и замкнутое скалярное управление
Бывает 2 основных вида частотного управления АД:
1. Скалярное при котором регулируется частота и действительное напряжение на статоре по определенным законам
2. Векторное при котором изменяются не только величины, но и и пространственные положения векторов токов и потокосцеплений путем контроля мгновенного значения
Скалярное управление: основой является закон Костенко, 1925 г.:
 : напряжение на статоре должно изменяться функцией частоты и напряжения. Закон Костенко позволяет поддерживать постоянство перегрузочных способностей двигателей.
: напряжение на статоре должно изменяться функцией частоты и напряжения. Закон Костенко позволяет поддерживать постоянство перегрузочных способностей двигателей.
Различают разомкнутые и замкнутые скалярные управления.
Разомкнутое скалярное управление осуществляется по закону  . Этот закон наиболее прост поскольку не требует никаких датчиков, но может использоваться только для механизмов с квадратичными зависимостями момента от скорости. Чаще применяется замкнутое скалярное управление. Существует 3 основных закона:
. Этот закон наиболее прост поскольку не требует никаких датчиков, но может использоваться только для механизмов с квадратичными зависимостями момента от скорости. Чаще применяется замкнутое скалярное управление. Существует 3 основных закона:
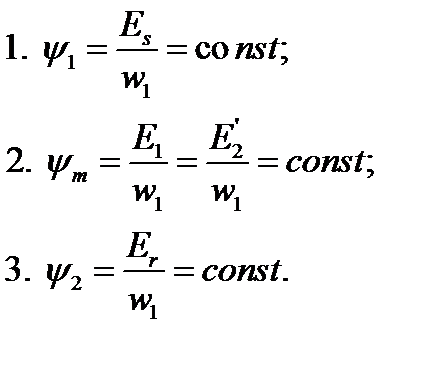
Сверху вниз по возрастанию сложности реализации и перегрузочной способности, однако при накладыв. на реальный электропривод огранич. выгода от 2-го и 3-его способов min.
Дата добавления: 2018-02-15; просмотров: 626; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!