Математическая модель ДПТ НВ. Естественные механическая и электромеханическая характеристики ДПТ НВ
Коллекторно-щеточный контакт ДПТ предназначен для преобразования пост.тока, кот. подается от источника в переменный с частотой пропорциональной частоте вращения вала. 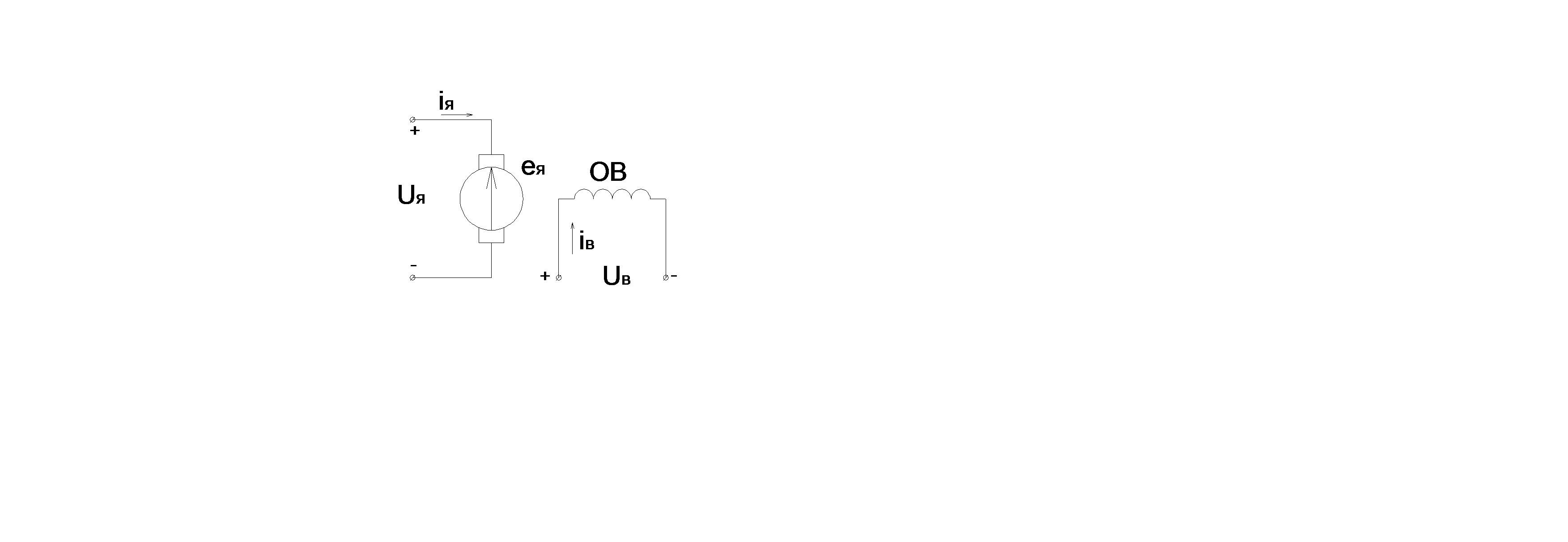
 - напряжение на якоре;
- напряжение на якоре;  - ток в обмотке якоря;
- ток в обмотке якоря;  - сопротивление якоря;
- сопротивление якоря;  - ЭДС, наводимая в обмотке якоря;
- ЭДС, наводимая в обмотке якоря;  - индуктивность обмотки якоря;
- индуктивность обмотки якоря;  - напряжение на обмотке возбуждения;
- напряжение на обмотке возбуждения;  - ток в ОВ;
- ток в ОВ;  - сопротивление ОВ;
- сопротивление ОВ;  - индуктивность ОВ;
- индуктивность ОВ;  - магнитный поток;
- магнитный поток;  - конструктивная постоянная двигателя.
- конструктивная постоянная двигателя.
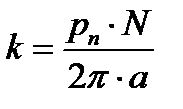 ;
;  - число пар полюсов;
- число пар полюсов;  - число активных проводников обм. якоря;
- число активных проводников обм. якоря;  - число пар параллельных ветвей.
- число пар параллельных ветвей.
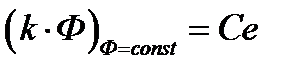 ;
;  - конструктивная постоянная при
- конструктивная постоянная при  .
.
Нелинейную зависимость  можнолинерилизовать. При этом:
можнолинерилизовать. При этом:
 ;
;  - эквивалентная индуктивность, кот.обеспечивает связь между
- эквивалентная индуктивность, кот.обеспечивает связь между  и
и  .
.
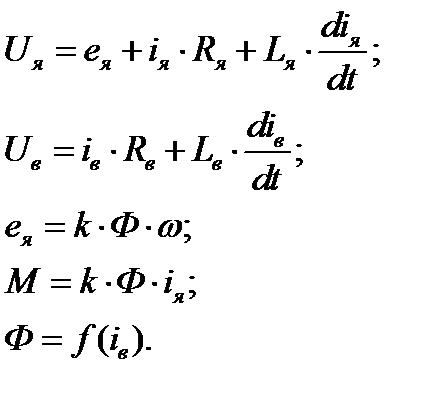
Для установившегося режима работы получаем след.систему уравнений:
 Из данной системы уравнений получим выражение для механич.
Из данной системы уравнений получим выражение для механич.
 иэлектромеханич. хар-к ДПТ НВ.
иэлектромеханич. хар-к ДПТ НВ.
 Электромеханич. выражение ДПТ НВ:
Электромеханич. выражение ДПТ НВ:  .
.
 Для получения мех.хар-ки из (4) выразим
Для получения мех.хар-ки из (4) выразим  и подставим в (6):
и подставим в (6):

 .
.
Введем след.обозначения:  - жесткость мех. хар-ки;
- жесткость мех. хар-ки;  - скорость идеального х.x.ДПТ НВ.
- скорость идеального х.x.ДПТ НВ.

Статич. хар-киДПТ НВ бывают двух видов: естественные и искусственные.
 Естественнаяхарк-ка получается при норм.схеме включения, т.е. без добавочных сопротивлений, при ном. напряжении и ном. магнитном потоке. Все остальные хар-ки являются искусственными.
Естественнаяхарк-ка получается при норм.схеме включения, т.е. без добавочных сопротивлений, при ном. напряжении и ном. магнитном потоке. Все остальные хар-ки являются искусственными.
Влияние параметров на характеристики ДПТ НВ
 1) Изменение напряжения на якоре двигателя (
1) Изменение напряжения на якоре двигателя (  )
)
 Ток КЗ двигателя пост. тока:
Ток КЗ двигателя пост. тока:
 .
.
Данный способ регулирования является наиболее экономичным. Для его реализации требуются устройства, способные регулировать пост. Напряжение (управляемый выпрямитель, преобразователь с широтно-импульсным направлением)
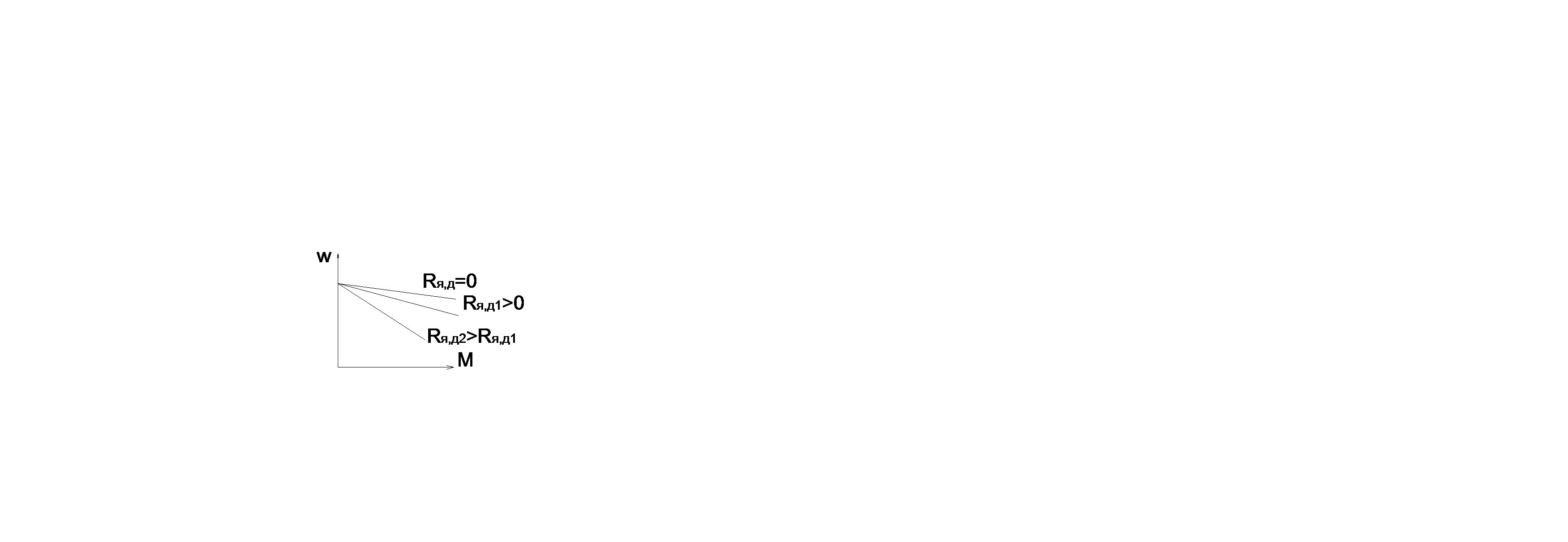 2) Изменение сопротивления цепи якоря (
2) Изменение сопротивления цепи якоря (  )
)
 - добавочное сопротивление в цепи якоря.
- добавочное сопротивление в цепи якоря.


3) Изменение магнитного потока (  )
)



1-  ; 2 -
; 2 -  ; 3-
; 3-  .
.
Обычно в промышленных электроприводах регулирование осуществляется за счет уменьшения магнитного потока (ослабление поля).
Тормозные режимы работы ДПТ НВ
 1) Режим рекуперативного торможения
1) Режим рекуперативного торможения
 Возникает в том случае, если скорость ротора превышает скорость идеального х.х. для даннойхар-ки. При этом ЭДС якоря выше приложенного напряжения, ток начинает протекать в противоположную сторону.
Возникает в том случае, если скорость ротора превышает скорость идеального х.х. для даннойхар-ки. При этом ЭДС якоря выше приложенного напряжения, ток начинает протекать в противоположную сторону.
Уравнение эл. цепи для данного режима:

2) Торможение противовключением
 Возникает в том случае, если скорость вращения ротора и скорость идеального х.х. направлены в противоположные стороны. Возможны 2 случая:
Возникает в том случае, если скорость вращения ротора и скорость идеального х.х. направлены в противоположные стороны. Возможны 2 случая:
1. при активном статич. моменте двигатель переходит на такую хар-ку, при кот.момент статич. превышает пусковой.
1 -  ; 2 -
; 2 - 
Допустим, двигатель работал в т.А. После введения в цепь якоря большого добавочного сопротивл. меняется направление вращения, двигатель переходит в т.В.
 .
.
2. торможение. Имеет место при изменении полярности питающего напряжения на противоположное.

 КВ – контактор вперед;
КВ – контактор вперед;
КН – контактор назад;
КП – контактор противовключения;
Мса,Мср– момент статический активный и реактивный.
Допустим двигатель работал в т.А (вперед без добавочного сопротивления). Если теперь отключим КВ и включим КН, при этом отключив KП, двигатель перейдет на хар-ку 2. Далее происходит торможение. Если при нулевой скорости не отключить КН, произойдет реверс. При реактивном статическом моменте привод перейдет в т.В, а при активном – в т.С.
 . Баланс мощностей для обоих случаев торможения противовключением будет иметь вид:
. Баланс мощностей для обоих случаев торможения противовключением будет иметь вид:  .
.
Достоинства: большая величина тормозного момента даже при малых скоростях, простота реализации. Недостатки: большиепотери.

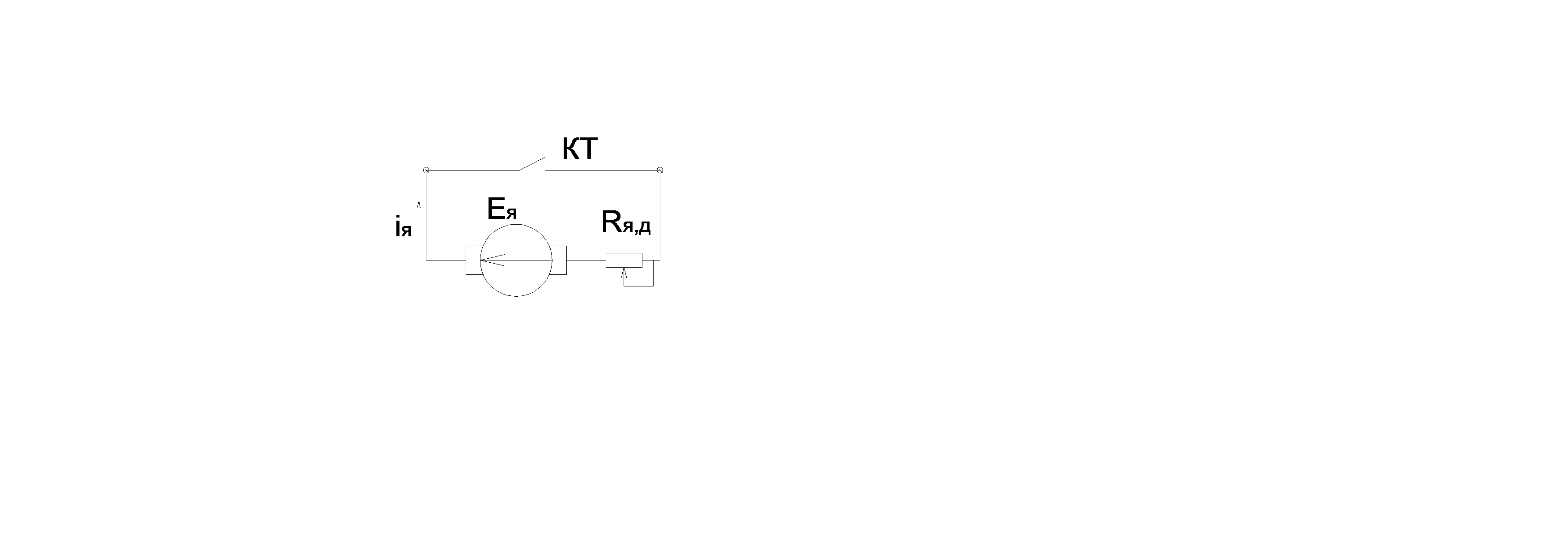 3) Динамическое торможение
3) Динамическое торможение
КТ – контактор торможения.
Для его осуществления необходимо отключить обмотку якоря от сети и замкнуть на добавочное сопротивление. Допустим, привод работал в т.А.
Если обмотка якоря замкнута на добавочное сопротивление, привод перейдет на хар-ку 2.
Установившийся режим зависит от вида статич. момента. При реактивном статич. моменте процесс закончится в т.В, при активном – в т. С, т.е. произойдет реверс.
 ; . Балансмощностей:
; . Балансмощностей:  .
.
Достоинства: дешевизна, простота реализации. Недостатки: снижение тормозного момента при приближении скорости к 0.
Дата добавления: 2018-02-15; просмотров: 1152; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!