Способы вычисления обобщенных сил
Определение обобщенных сил по основной формуле
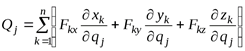 (1’)
(1’)
Способ «замораживания» обобщенных координат.
Дадим механической системе такое виртуальное перемещение, при котором все вариации обобщенных координат кроме  равны нулю:
равны нулю: 
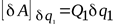
Вычислим на это перемещение работу  всех активных сил, приложенных к системе
всех активных сил, приложенных к системе
3. Случай потенциального силового поля.
Предположим, известна потенциальная энергия механической систем 
Тогда 
Внося эти значения в формулу (1’) получим
 (2)
(2)
Вывод: обобщенная сила равна частной производной от взятой со значком – потенциальной энергии по соотв. обобщ. коорд. qi.
3.Условия равновесия механической системы в обобщенных координатах
Так как все величины между собой независимы, то каждый из коэффициентов равен нулю
 (3)
(3)
Уравнения Лагранжа второго рода
Тождества Лагранжа
Пусть система имеет n степеней свободы и её положение определяется  обобщенными координатами
обобщенными координатами 
Дифференцируя по времени получим
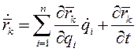 (1)
(1)
Дифференцируя по обобщ. скорости получим
 (2)- первое тождество Лагранжа
(2)- первое тождество Лагранжа
При их диф. Появляются вторые производные
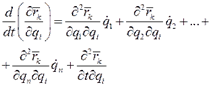 (2)
(2)
 (3)- второе тождество Лагранжа
(3)- второе тождество Лагранжа
 (4)- уравнение Лагранжа второго рода.
(4)- уравнение Лагранжа второго рода.
Достоинства ур. Лагранжа второго рода:
1- Эти ур. Применимы для широкого класса мех. системы , их примен. Экономично, в том смысле, что не требуют введения дополнительных координат и реакций связи.
2- Процедура проведения ур. Лагранжа одинаково во всех задачах
Элементарная (приближённая) теория гироскопа
Гироскоп – твердое тело с одной неподвижной точкой О и соью Оz материальной симметрии, вращающиеся вокруг этой оси с угловой скоростью ω1 во много раз больше угловой скорости вращения самой оси.
Гироскоп с неподвижной точкой О в центре масс называется астатическим. При применении гироскопа важно знать его применение оптической оси. При этом угловая скорость ω1 поддерживается постоянно.
У современных гороскопов ω2 мала по сравнению с ω1 собственного вращения.
ω2 < 0,01рад/с, ω1 ~ 2000-1500рад/с
Можно считать вектор ω ~ вектору ω1, а осью полагает совпадающая с осью собственного вращения Оz, когда K0 равен Tz ω1K, где К –орт оси симетрии гироскопа.
Вывод: кинетический момент гироскопа можно принять равному его собственному моменту, поэтому в рамках приближенной теории движения оси гироскопа по кинетическому моменту.
Теория Рудаля
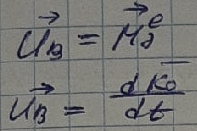
Скорость конца В –конца вектора кинетического момента К0 относительного некоторого неподвижного центра О геометрически, равная главному моменту действующих на систему внешних сил относительно центра
Вывод: пока М0 отлично от 0, то и ОВ0 отлично, ось Z процессирует, но как только М0 тождественно равно 0, ω2=0, ось 0z останавливается. Теория позволяет решать две задачи:
1) Найти главный момент внешних сил;
2) Движение оси гироскопа.
Свойства гироскопа
1) При устанавливающимся вращении сил астатического гироскопа главный момент внешних сил Пое равен 0. Тогда по теореме моментов:

Рисунок 1 - равенство (4)
Т.е. вектор задающий положение оси гироскопа остается постоянным по направлению в инерциальной системе отсчета.
Равенство (4) выражает свойство устойчивости оси гироскопа: ось астатического гироскопа устойчиво сохраняет свое направление в инерциальной системе отсчета (удары вызывают вибрацию осей гироскопа очень малых амплитуд).
Это свойство используется при конструировании различных приборов навигации.
2) Обнаруживается когда на ось начинает действовать сила (пара сил), стремящиеся привести ось в движение.
Пусть на ось гироскопа действует F(г), тогда по теореме Разаля:
Закон процессии оси гироскопа
При действии силы на ось гироскопа – эта ось отклоняется на в сторону действия этой силы.
Дата добавления: 2020-04-25; просмотров: 194; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!