Синтез шарнирного четырехзвенника по коэффициенту изменения средней скорости и двум крайним положениям коромысла
Коэффициент k изменения средней скорости ведомого звена равен k = VC 2– 1 / VC 1– 2 ,
где VC 1– 2 − средняя линейная скорость точки С (рис. 3.4) при рабочем ходе, VC 2– 1 − то же при обратном ходе.
Примем k > 1, так как при проектировании механизмов, как правило, время возврата в исходное положение принимается меньше времени рабочего хода, поэтому k > 1.
Нетрудно доказать, что k = (180° + θ) /(180° – θ).
Откуда θ = 180° (k −1) /(k +1),
где q − угол между положениями шатуна BC в начале и в конце рабочего хода.
Введем обозначения:
l1 – длина кривошипа АВ, (см. рис. 3.4); l2 – длина шатуна ВС;
l3 – длина коромысла CD; l4 – расстояние между опорами (длина стойки А D).

Рис. 3.4. Схема механизма в положениях, соответствующих значениям заданных углов ψ
Задавшись углами ψ1 и ψ2, а также коэффициентом k, изобразим два крайних положения коромысла CD (рис. 3.5).
Точки С1 и С2 соединим прямой. Вычислим угол q между крайними положениями шатуна ВС. При точке С2 построим угол γ = 90° − θ, а из точки С1 опустим перпендикуляр к линии С1С2 до пересечения с линией, проведенной из точки С2 и образующей угол γ. Точку пересечения названных линий обозначим О. Очевидно, что в прямоугольном треугольнике O С1С2 угол С1ОС2 = θ. По трем точкам O, С1 и С2 опишем окружность. Вписанный угол с вершиной в точке О опирается на дугу  и равен углу θ, так же как и все вписанные углы, опирающиеся на эту же дугу. Выберем на окружности с центром в точке О произвольную точку А и соединим ее прямыми отрезками с точками С1 и С2. В результате, расположив опору кривошипа в точке А, получим схему четырехзвенного механизма в крайних положениях (см. рис. 3.5).
и равен углу θ, так же как и все вписанные углы, опирающиеся на эту же дугу. Выберем на окружности с центром в точке О произвольную точку А и соединим ее прямыми отрезками с точками С1 и С2. В результате, расположив опору кривошипа в точке А, получим схему четырехзвенного механизма в крайних положениях (см. рис. 3.5).
|
|
|

Рис. 3.5. Синтез шарнирного четырехзвенника по коэффициенту k
изменения средней скорости и двум крайним положениям коромысла
Из рисунка следует АС1 = В1С1 −АВ1 = l2 − l1; АС2 = В2 С2 −АВ2 = l2 + l1.
Откуда l1 = 0,5 (АС2 −АС1) μ l / 2; l2 = АС2 − l1.
Длина стойки А D = l4 определится положением точки А.
Поскольку положение точки А выбиралось произвольно, имеет место многовариантность решения задачи. Это позволяет вводить дополнительные условия, например, условие передачи сил, наличие или отсутствие эксцентриситета расположения опор по отношению к координатной оси.
Синтез кулисного механизма по коэффициенту k изменения
Средней скорости кулисы
Дано: коэффициентk изменения скорости хода и два крайних положениям точки В кулисы ВС.
Рассмотрим кулисный механизм в двух крайних положениях (рис. 3.6).
|
|
|

Рис. 3.6. Синтез кулисного механизма
Угол между положением кривошипа ОА2 и продолжением кривошипа в положении ОА1 равен θ = 180° (k −1) /(k +1). Углы В1С В2и q будут равны между собой, как углы с взаимно перпендикулярными сторонами.
На прямой В1 В2 строим равнобедренный треугольник с углом при вершине С, равным углу q. На прямой, делящей угол q пополам в произвольной точке, выбираем точку О, вокруг которой вращается кривошип ОА. Опустив из точки О перпендикуляр на прямую В1С (или В2С), найдем длину кривошипа ОА. Полученный кулисный механизм будет удовлетворять заданным условиям. Построение кулисного механизма по заданным условиям происходит следующим образом. Точки В1 и В2, положение которых задано, соединим прямой.
Синтез кривошипно-ползунного механизма
Примем следующие условные обозначения (рис. 3.7):

Рис. 3.7. Схема кривошипно-ползунного механизм
r – длина кривошипа ОА; Н – ход ползуна; l – длина шатуна АВ;
е – дезаксиал, т.е. смещение траектории точки В ползуна относительно оси Ох ;
L = l / r – относительная длина шатуна;
ν = е/ r – относительный дезаксиал;
h = H / r – относительный ход ползуна;
λмах – максимальный угол давления (см. рис. 3.3);
|
|
|
k − коэффициент изменения средней скорости ползуна (см. § 3.1)
ψ1 и ψ 2 – острые углы, образованные кривошипом ОА с направлением Ох в крайних положениях ползуна: φ1 =  В1Ох, φ2 = В2Ох ;
В1Ох, φ2 = В2Ох ;
θ = ψ2 – ψ 1 – острый угол между шатунами в крайних положениях ползуна.
Задача 1. Дано: Н, е, L = l / r.
Найти: r ; l ;׀λмах ׀.
Решение:
 .
.
Длина кривошипа ОА: r = H / h. Длина шатуна АВ: l = L r .
Наибольшее значение угла давления ׀ λмах׀ = arc sin [(1 + ν) /L] .
Задача 2. Дано: Н, k , L = l / r.
Найти: r; l; e;׀ λмах ׀.
Решение:
Острый угол между шатунами в крайних положениях ползуна
θ = 1800∙(k–1)/(k+1).
Относительный ход ползуна найдем из выражения
h = {2∙[1+L2 – (L2 – 1)∙cos θ]}0,5.
Относительный дезаксиал найдем из выражения
ν = [(h –2)∙(L 2 –1)]0,5.
Длина кривошипа r = H / h; длина шатуна l = L r ; дезаксиал е = ν r.
Наибольшее значение угла давления λмах = arc sin [(1 + ν) / L].
4. КИНЕМАТИЧЕСКИЙ АНАЛИЗ РЫЧАЖНЫХ МЕХАНИЗМОВ
Кинематическое исследование состоит в изучении движения звеньев механизма с геометрической точки зрения, т. е. без учета их инертности (массы) и действующих на них сил. При анализе решаются три основные задачи: определение положений звеньев и траекторий, описываемых отдельными точками звеньев; определение линейных скоростей отдельных точек и угловых скоростей звеньев; определение линейных ускорений отдельных точек и угловых ускорений звеньев. Здесь считаются известными (заданными) кинематическая схема механизма, размеры звеньев и законы движения начальных звеньев.
|
|
|
Ниже рассмотрены основные графические методы кинематического анализа: метод планов положений, метод кинематических диаграмм, метод планов скоростей и планов ускорений.
Задача о положениях звеньев
Графическое изображение взаимного расположения звеньев, соответствующее выбранному моменту времени, выполнятся в определенном масштабе, и называется кинематической схемой.Ряд следующих друг за другом схем позволяет наглядно проследить за движением звеньев и перемещением точек по траекториям.
Построение планов положений
Построение плана механизма необходимо начинать с изображения по заданным координатам неподвижных относительно стойки элементов звеньев и направляющих. Затем изображают начальное звено в заданном положении. После этого определяют положения центров шарниров групп Ассура. В группах Ассура второго класса положения этих точек определяются методом засечек. Для определения траектории какой-либо точки необходимо построить несколько последовательных планов механизма, определить положение этой точки на каждом из планов и соединить их плавной кривой.
Рассмотрим построение планов положений на примере кривошипно-ползунного механизма, кинематическая схема которого изображена на рис..4.1.
Кривошип OA вращается равномерно, следовательно, в равные промежутки времени палец кривошипа A проходит одинаковые участки пути. Делим траекторию пальца кривошипа, представляющую окружность, на двенадцать равных частей, обозначив начальное положение, при котором кривошип и шатун располагаются по одной прямой линии, через A0.
Рис. 4.1. План положений кривошипно-ползунного механизма
Траекторией точки B ползуна является прямая xx. Находим последовательные положения точки B, соответствующие положениям ведущей точки A. Длина шатуна остается неизменной в течение всего движения. Поэтому для нахождения соответствующего положения точки Bi делаем засечку на траектории x–x радиусом AB, поставив ножку циркуля в соответствующую точку Ai. Построение производим в масштабе.
Масштабный коэффициент μS – это отношение действительного значения физической величины к длине отрезка в миллиметрах, который изображает эту величину на чертеже.
Масштабный коэффициент планов механизма μS = lOA /(OA),
где lOA – истинная длина кривошипа; OA – отрезок, изображающий кривошип на плане (рис. 4.1).
Соединив плавной кривой точки Si, обозначающие центры тяжести последовательных положений шатуна, получим траекторию его центра тяжести, которая относится к семейству шатунных кривых. Точно так же можно построить траекторию любой точки любого звена рычажного механизма.
Метод планов скоростей и ускорений
Наглядное представление о величинах и направлениях скоростей и ускорений отдельных точек механизма дают планы скоростей и ускорений.
Планом скоростей (ускорений) звена называют графическое построение векторных уравнений скоростей (ускорений) точек звеньев.
Построение планов скоростей и ускорений начинают с начального звена, определяя скорость и ускорение подвижного центра кинематической пары, соединяющей это звено с остальным механизмом. При построении планов скоростей и ускорений удобно использовать принцип подобия.
Принцип подобия для планов скоростей и ускорений точек жесткого звена: относительные скорости (полные относительные ускорения) точек жесткого звена образуют на плане скоростей (ускорений) фигуру, подобную жесткому звену с одинаковым порядком расположения вершин при одинаковом направлении их обхода.
Далее построение планов ведут по группам Ассура в той же последовательности, в какой эти группы присоединялись к начальному звену. Планы скоростей и ускорений для групп Ассура 2-го класса различных видов и простейших механизмов 2-го класса с необходимыми векторными уравнениями представлены в табл. 4.1.
Таблица 4.1. Планы скоростей и ускорений для групп Ассура и механизмов 2-го класса
| Дано: | Дано: | ||||
| План группы 1-го вида | 
| План группы 2-го вида | 
| ||
| Уравнения скоростей | Уравнения скоростей | ||||
|
|
| ||||
| План скоростей |
| План скоростей |
| ||
| Уравнения ускорений | Уравнения ускорений | ||||
|
|
| ||||
| План ускорений |
| План ускорений |
| ||



 ,
,  .
. ,
,  .
.
 ,
,  .
. ,
,  .
.


 ,
,





 ,
,




Продолжение таблицы 4.1
| Дано: | Дано: | ||
| План группы 3-го вида | 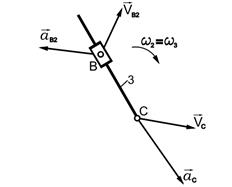
| План механизма | 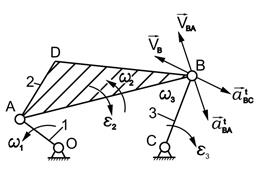
|
| Уравнения скоростей | Уравнения скоростей | ||
|
|
Используем подобие: | ||
| План скоростей | 
| План скоростей | 
|
| Уравнения ускорений | Уравнения ускорений | ||
|
|
Используем подобие: | ||
| План ускорений | 
| План ускорений | 
|




 ,
,  .
.
 ,
,  .
. ,
,  .
.

 ,
,



 ,
,

Окончание таблицы 4.1
Дано: | Дано: | ||||||
| План кривошипно-ползунного механизма | 
| План кулисного механизма | 
| ||||
| Уравнения скоростей | Уравнения скоростей | ||||||
|
|
| ||||||
| План скоростей |
| План скоростей |
| ||||
| Уравнения ускорений | Уравнения ускорений | ||||||
|
|
| ||||||
| План ускорений |
| План ускорений |
 Мы поможем в написании ваших работ! | ||||


 ,
, 
 ,
, 
 .
.
 ,
,  .
. ,
,  .
. .
.


 ;
; ;
;
 ;
; ;
; .
.
 ;
; .
. ;
; 
 ;
;  ;
;  .
.
