Основные понятия и определения
Современные методы кинематического и динамического исследования механизмов определяются их структурой. Поэтому анализ любого механизма начинается с изучения его строения.
Рассмотрим основные понятия и определения, которыми будем пользоваться при изучении курса теории механизмов и машин.
Деталь – часть машины, изготовленная без сборочных операций.
Звено – одна или несколько деталей, жестко соединенных между собой и перемещающихся при работе машины как одно целое. В рамках нашего курса звено рассматривается как абсолютно жесткое тело.
Стойка– неподвижное звено (станина, корпус). Входное звено – этозвено, которому сообщается движение для преобразования в требуемые движения других звеньев. Выходное звено – этозвено, совершающее движение, для которого создан механизм. Все остальные звенья являются промежуточными или соединительными. Начальное звено – это звено, которому приписывается одна или несколько обобщенных координат.
При решении инженерных задач анализа и синтеза механизмов изображение механизма упрощают,абстрагируясь от реальных форм звеньев и кинематических пар, их условным изображением. Такое упрощенное изображение механизма называют структурной или кинематическая схема механизма. Для изображения схем используют графические изображения, установленные ЕСКД (ГОСТ 2.770).
В зависимости от характера движения относительно стойки наиболее распространенные подвижные звенья носят следующие названия.
Кривошип – звено механизма, совершающее полный оборот вокруг оси, связанной со стойкой.
Коромысло – звено, совершающее неполный оборот вокруг оси, связанной со стойкой.
Шатун совершает плоскопараллельное движение.
Ползун – звено, поступательно перемещающееся относительно стойки или другого подвижного звена.
Кулиса – подвижное звено, которое является направляющей для ползуна.
Кулачок – звено с профилем переменной кривизны, который определяет закон движения ведомого звена.
Зубчатое колесо – звено с замкнутой системой зубьев, которое обеспечивает за полный оборот непрерывное движение парного звена.
Кинематической парой называетсяподвижное соединение двух звеньев.
Точки, линии или поверхности, по которым происходит соприкосновение звеньев в кинематической паре, называются элементами.
Способ соединения звеньев накладывает на относительное движение каждого звена (положение, скорость) кинематической пары ограничения, которые должны выполняться при любых силах, действующих на звенья. Эти ограничения называются связями.
Известно, что свободное тело в пространстве обладает шестью степенями свободы. Число связей S , наложенных на относительное движение звена кинематической парой, может изменяться в пределах 1≤ S ≤ 5.
Кинематические пары классифицируются по различным признакам.
- По числу связей пары делят на 5классов: номер класса равен количеству связей, наложенных на относительное движение звеньев.
- По виду элементов пары делят на низшие и высшие.
К низшим относят кинематические пары, элементами которых являются поверхности. Элементами высших пар являются линии или точки.
В табл. 2.1. показаны условные изображения и классификация кинематических пар. На рис. 2.1 показаны пары пятого класса.
В поступательной (рис. 2.1, б) и вращательной (рис. 2.1, а) парах на относительные движения звеньев наложено пять связей: исключены все движения, кроме одного. В винтовой паре (рис. 2.1, в) также наложено пять связей, (вращение не вносит степени свободы, так как в данном случае поступательное и вращательное движения зависимы).
Таблица 2.1.
Классификация допускаемых движений и условные обозначения кинематических пар
| Число степеней подвижности W | Класс пары S | Вид кинематической пары | Условное обозначение | Низшая или высшая |
| 1 | 5 | Поступательная (одноподвижная) |    
| Низшая |
| 1 | 5 | Вращательная (одноподвижная) |           
| Низшая |
| 1 | 5 | Винтовая (одноподвижная) |          
| Низшая |
| 2 | 4 | Цилиндрическая (двухподвижная) |     
| Низшая |
| 3 | 3 | Сферическая (трехподвижная) |      
| Низшая |
| 3 | 3 | Плоскостная (трехподвижная) |      
| Низшая |
| 4 | 2 | Цилиндр – плоскость (четырехподвижная) |      
| Высшая |
| 5 | 1 | Шар – плоскость (пятиподвижная) |     
| Высшая |
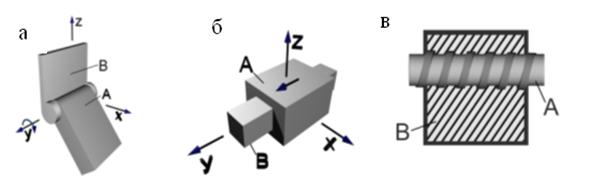
Рис. 2.1. Кинематические пары пятого класса (одноподвижные)
Кинематической цепью называется система звеньев, образующих между собой кинематические пары.
Механизмом называется кинематическая цепь с одним неподвижным звеном – стойкой, в которой при заданном законе движения одного или нескольких звеньев все остальные звенья будут перемещаться по вполне определенным законам.
Структурной схемой механизма называется безмасштабная схема механизма, предназначенная для исследования его структуры.
Структурная схема механизма может существенно отличаться от его реального конструктивного исполнения. Например, на рис. 2.2 показан общий вид щековой дробилки. На рис. 2.3 представлена структурная схема этого механизма.

Рис. 2.2. Общий вид дробилки

Рис. 2.3. Структурная схема дробилки
Обобщенной координатой механизманазывается независимая координата, однозначно определяющая положение всех звеньев механизма относительно стойки. На механизме, изображенном на рис. 2.3 угол поворота входного звена − кривошипа, обозначенного стрелкой, полностью определяет положение остальных звеньев, если задана их длина. Поэтому угол поворота кривошипа является обобщенной координатой механизма.
Степенью подвижности механизма называется число степеней свободы относительно стойки, т.е. неподвижного звена. Число степеней подвижности W равно числу обобщенных координат механизма. При W = l механизм имеет только одно входное звено.
Для определения степени подвижности механизма в зависимости от его строения служат структурные формулы. В общем случае для пространственного механизма (структурная формула Сомова-Малышева):
 , (2.1)
, (2.1)
где n – число подвижных звеньев, S – число связей,
p 5 – число пар 5-го класса, р4 – число пар 4-го класса,
р3 – число пар 3-го класса, р2 – число пар 2-го класса,
p 1 – число пар 1-го класса.
Плоские механизмы
Механизмы, траектории точек звеньев которых расположены в одной или параллельных плоскостях называются плоскими механизмами.В технике такие механизмы нашли наиболее широкое применение.
В заданиях на курсовой проект также предложены плоские механизмы.
В плоском механизме кинематические пары пятого класса являются низшими, а пары четвертого – высшими. Для определения степени подвижности механизма используется формула Чебышева
 ,
,
где р5 = рН – число пар пятого класса – низших; р4 = рВ – число пар четвертого класса – высших.
В состав плоского механизма не могут входить пары третьего, второго и первого классов, поскольку движение каждого звена ограничено в этом случае наложением трех общих условий связи.
Классификация плоских механизмов
В основу классификации положено требование единства методики кинематического и силового анализов механизмов. Этому требованию соответствует структурная классификация механизмов, разработанная профессором Л.В. Ассуром. Основная идея Л.В. Ассура состоит в том, чтолюбой механизм может быть создан путем присоединения к начальному звену (или начальным звеньям) и стойке кинематических цепей нулевой подвижности, называемых структурными группами (группами Ассура).
По классификации И. И. Артоболевского начальное звено и стойка, образующие кинематическую пару пятого класса, являются механизмом 1-го класса. Группой Ассура называется кинематическая цепь, степень подвижности которой после присоединения ее свободных элементов к стойке равна нулю при условии, что она не распадается на более простые группы Ассура.
На рис. 2.4, а, в представлены простейшие группы, состоящие из двух звеньев.

Рис. 2.4. Простейшие группы Ассура
Для них, если свободные элементы присоединить к стойке, кинематическая цепь превратится в ферму (рис. 2.4, б), а степень подвижности
 .
.
Для групп с парами только 5-го класса n= 2p5 / 3, при этом nи p5 – целые числа.
Класс группы определяется наивысшим по классу контуром, входящим в ее состав.
Класс контура равен числу кинематических пар, входящих в замкнутый контур.
Порядок группы равен числу свободных элементов кинематических пар, которыми группа присоединяется к механизму.
В практике наибольшее распространение получили механизмы, включающие группы второго класса. В зависимости от числа и взаимного расположения вращательных и поступательных кинематических пар различают пять видов структурных групп 2 - го класса (табл. 2.2).
Таблица 2.2.
Виды групп Ассура 2-ого класса
| № вида | Схема группы | Вид и расположение пар | Пример образованных механизмов | Название механизма |
| 1 | 
| Все пары вращательные | 
| Шарнирный четырехзвенник |
| 2 | 
| Две пары вращательные | 
| Кривошипно-ползунный |
| 3 | 
| Две пары вращательные | 
| Кулисный |
| 4 | 
| Две пары поступательные, одна вращательная | 
| Кулисно-ползунный (тангенсный) |
| 5 | 
| Две пары поступательные, одна вращательная | 
| Механизм двойного ползуна (синусный) |
Дата добавления: 2018-10-27; просмотров: 360; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!