Инерциально-спутниковые навигационные комплексы
Интеграция ИНС и СНС позволяет создать высокоточный навигационный комплекс сочетающий в себе преемущества ИНС и СНС . Основные достоинства и недостатки приведены в таблице.

Варианты комплексирования ИНС и КНС
-слабосвязанная схема комплексирования;
-сильносвязанная схема комплексирования;
Слабосвязанная схема комплексирования представлена на рисунке
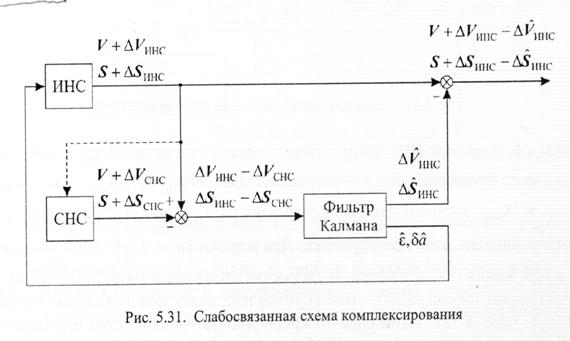
Эта схема предполагает использование инвариантной схемы обработки с настройкой фильтра на модель поведения ошибок
 ,
,
 ,
,
И модель разностных измерений

где  ,
,  .
.
Следующей по уровню интеграции является сильносвязанная система, схема которой изображена на рисунке

Здесь как и прежде ИНС вырабатывает координаты и скорость которые используются для выработки псевдодальностей  и псевдоскоростей
и псевдоскоростей  до
до  -го спутника. Для определения этих параметров неодходимы координаты спутников в геоцентрической системе координат (эфемериды). Затем формируются измерения путем сравнения этих параметров и соответствующих параметров, выработанных в СНС
-го спутника. Для определения этих параметров неодходимы координаты спутников в геоцентрической системе координат (эфемериды). Затем формируются измерения путем сравнения этих параметров и соответствующих параметров, выработанных в СНС


поступающие на фильтр Калмана.
Информация о псевдокоординатах и псевдоскоростях поступает в СНС для ускорения захвата сигналов спутников и сужения полосы пропускания.
Так как в приведенной схеме измерения строятся по разности псевдодальностей и псевдоскорости в СНС не требуется реализации отдельного фильтра Калмана для выработки координат и скорости. Преимуществом сильносвязанной системы является отсутствие необходимомтинаблядать как минимум четыре спутника –комплексная система позволяет использовать информацию даже от одного спутника.
|
|
|
Пример. БИНС иСНС объединяются по слабосвязанной схеме комплексирования, причем от СНС привлекается только позиционная информация. Частота 1 гц. Точность 20 метров. ЛА совершает горизонтальный полет на Север поэтому  ,
,  .
.
Полагаем, что в БИНС используются ДНГ типа ГВК-16 и микроакселерометры типа ADXL 202 , основные характеристики которых представлены в таблице

Решение. Воспользуемся приближенной моделью погрешностей северного канала БИНС
 ,
,
 ,
,
 .
.
С учетом таблицы


Для систематических составляющих можно записать
 ,
,
 .
.
Считая флуктуационные составляющие белошумными распределенными по нормальному закону модель поведения ошибок примет вид
 ,
,
 ,
,
,
,
.
Сформируем модель измерений
 .
.
Введем вектор состояния

и представим уравнения в матричном виде

Таким образом, матрица динамики  равна
равна
 .
.
Матрица возмущения  равна
равна

Матрица интенсивности шумов возмущений равна
 ,
,
где  ,
,  .
.
Находим переходную матрицу состояния
|
|
|
Находим переходную матрицу возмущений

Находим матрицы интенсивностей  и
и  для дискретного времени
для дискретного времени

где  ,
,  .
.

Результаты моделирования приведены на графиках

Оценка ошибки построения вертикали принимает установившееся значение к моменту времени оценивания 100 с. Ошибка оценивания составляет 0.2 град.
-Оценивание ошибки по скорости происходит достаточно точно. Время переходного процесса около 30 сек.
-При оценивании систематической составляющей происходит интенсивное списание грубой ошибки. На интервале 100-250 сек ФК уточняет достаточно точно уход гироскопа
-систематическая составляющая акселерометра не наблюдаема и следовательно этот параметр не уточняется.
Оценка погрешности БИНС по координате определяется с точностью СНС . Время переходного процесса порядка 25-30 сек.
Дата добавления: 2018-06-27; просмотров: 1100; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!