Принципы построения комплексных систем навигации
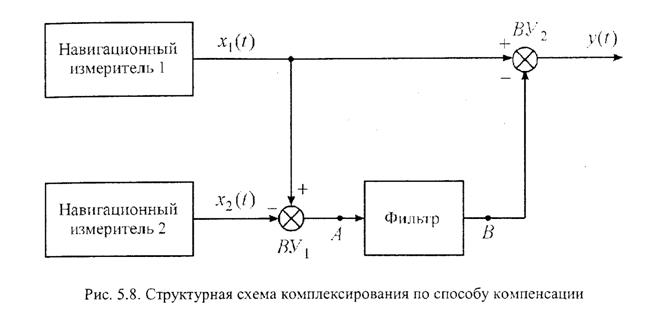
Инвариантный подход к обработке избыточных измерений. Основная идея заключается в формировании разностных измерений от двух навигационных измерителей при которых исключаются из рассмотрения навигационные параметры , стохастическое описание которых затруднено.
Структурная схема комплексирования в рамках инвариантного подхода приведена на рисунке
Модель измерений имеет вид


В соответствии со схемой формируется разностное измерение

модель которого имеет вид
 .
.
Это измерение поступает на вход фильтра, обеспечивающего оценивание погрешности  с некоторой точностью, которая используется для коррекции показаний навигационной системы.
с некоторой точностью, которая используется для коррекции показаний навигационной системы.
Постановка задачи оценивания
В линейной постановке поведение динамической системы и процесс измерений
могут быть описаны с использованием уравнений
 ,-
,-  ,
,
 .
.
где  -вектор состояния динамической системы размерности
-вектор состояния динамической системы размерности  ;
;  -вектор измерений размерности
-вектор измерений размерности  ;
;  -центрированный вектор ошибок измерений с ковариационной матрицей
-центрированный вектор ошибок измерений с ковариационной матрицей  ,
,  -многомерная, в общем случае, нелинейная функция;
-многомерная, в общем случае, нелинейная функция;  вектор начальных условий, распределенный ,например, по нормальному закону
вектор начальных условий, распределенный ,например, по нормальному закону  .
.
Формирование конечно-разностных уравнений, описывающих поведение динамической системы
Для решения задачи цифровой обработки информации представляется полезным перейти к конечно-разностным уравнениям, описывающим поведение динамических систем.
|
|
|
Пусть непрерывное уравнение имеет вид
,
при этом характерной особенностью проведения измерений является их проведение в дискретные моменты времени  .
.
Заметим, что в системе уравнений содержатся два типа уравнений дискретное для измерений и непрерывное для описания поведения динамической системы, что затрудняет решение задач методами цифровой обработки. В этой связи возникает задача перейти к одному виду уравнений

 (*)
(*)
Для того, чтобы решить задачу оценивания опишем поведение динамической системы в моменты проведения измерений
С этой целью проинтегрируем уравнение (*) на интервале 
 (**)
(**)
где  -переходная матрица системы
-переходная матрица системы
Вводя обозначения
 ,
, 
перепишем уравнение (**) в виде

Можно показать, что ковариационная матрица

ошибки оценки 
удовлетворяет уравнению
 ,
,  .
.
Решение такого матричного уравнения известно и определяется выражением
 ,
,
где  ,
,
при этом устанавливаются следующие соотношения между параметрами в дискретном и непрерывном времени:
-вектор состояния соответствует вектору  ;
;
-матрица  принимается равной переходной матрице
принимается равной переходной матрице  , удовлетворяющей уравнению
, удовлетворяющей уравнению
|
|
|
 ,
,  ;
;
-  -порождающий шум, распределенный по нормальному закону, с ковариационной матрицей, определяемой выражением
-порождающий шум, распределенный по нормальному закону, с ковариационной матрицей, определяемой выражением

 .
.
Заметим, что если матрица  не зависит от времени, то в качестве переходной матрицы выступает матричная экспонента
не зависит от времени, то в качестве переходной матрицы выступает матричная экспонента
 ,
,
которая может быть вычислена с использованием матричного ряда
 .
.
При сравнении параметров непрерывных и дискретных моделей, описывающих поведение динамических систем, обратим внимание также на следующую особенность: при вырожденности матрицы  ковариационная матрица порождающего шума
ковариационная матрица порождающего шума  , как правило, оказывается невырожденной.
, как правило, оказывается невырожденной.
Дата добавления: 2018-06-27; просмотров: 572; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!