Оптимальное управление мехатронными и робототехническими системами
2. Принципы управления. Управление по возмущению.
В этих системах управлении осуществляется па основе измерения возмущений, т. е. самих причин, вызывающих отклонения состояния системы от желаемого. Управление по возмущению, если это возмущение можно тем или иным способом измерять, является весьма эффективным средством улучшения динамических свойств обычных систем управления, основанных на измерении отклонения.
Распространение адаптивного подхода на такие комбинированные системы не представляет каких-либо затруднений, и читатель при необходимости выведет для интересующих его случаев алгоритмы управления.
Мы же здесь коснемся весьма интересной задачи управления по возмущению так называемых переопределенных объектов, т. е. объектов, в которых число регулируемых величин (координат) превосходит число управляющих воздействий.
Уравнение переопределенных объектов запишем так:
 , (7.34)
, (7.34)
где
 (7.35)
(7.35)
—  -мерный вектор возмущений,
-мерный вектор возмущений,
 (7.36)
(7.36)
—  -мерный вектор управляющих воздействий,
-мерный вектор управляющих воздействий,
 (7.37)
(7.37)
—  -мерный вектор выходных величин.
-мерный вектор выходных величин.
Для переопределенных объектов  . Поэтому, вообще говоря, невозможно обеспечить поддержание всех выходных величин на заданных уровнях. Однако можно попытаться обеспечить нахождение всех выходных величин в некоторых пределах
. Поэтому, вообще говоря, невозможно обеспечить поддержание всех выходных величин на заданных уровнях. Однако можно попытаться обеспечить нахождение всех выходных величин в некоторых пределах
 (7.38)
(7.38)
где  и
и  выбираются заранее, исходя из технических условий, предъявляемых к рассматриваемому объекту.
выбираются заранее, исходя из технических условий, предъявляемых к рассматриваемому объекту.
Для этой цели воспользуемся следующим законом управления по возмущению:
 , (7.39)
, (7.39)
где  — матрица известных функций
— матрица известных функций  . Уравнение (7.39) определяет структуру управляющего устройства.
. Уравнение (7.39) определяет структуру управляющего устройства.
3. Принципы управления. Управление по отклонению.
Принцип управления по отклонению (принцип обратной связи) . Этот принцип является одним из наиболее ранних и широко распространенных принципов управления. В соответствии с этим принципом система управления наблюдает за объектом, на который воздействуют возмущающие факторы. В результате, в поведении объекта возникают отклонения. Система управления отслеживает наблюдаемые параметры (переменные) и на основе наблюдений создает алгоритм управления. Особенность этого принципа заключается в том, что система управления начинает действовать на объект только после того, как факт отклонения уже свершился. Это и есть "обратная связь". Схема управления изображена на рисунке.
Схема управления по отклонению (обратная связь)
При такой схеме полная компенсация влияния возмущающих воздействий невозможна. Тем не менее, схема управления с обратной связью получила наибольшее распространение на практике. Это объясняется простотой ее реализации.
Обратная связь — одно из основных понятий теории управления. Вообще обратной связью называется любая передача влияния из выхода той или другой системы на его вход. В системах управления обратная связь можно определить как информационную связь, с помощью которой в управляющую часть поступает информация о следствиях управления объектом, то есть информация о новом состоянии объекта, который возник под влиянием управляющих действий.
Благодаря наличия обратной связи сложные системы в принципе могут выходить за пределы действий, которые предусмотренные и определенные их разработчиками. Ведь обратная связь создает в системе новое качество: способность накоплять опыт, определять свое будущее обращение в зависимости от обращения в минувшему, то есть самообучаться.
Обратную связь можно обнаружить во многих процессах в природе. Примером могут служить вестибулярный аппарат, обнаруживающий отклонение тела от вертикали и обеспечивающий поддержание равновесия, системы регуляции температуры тела, ритма дыхания и т.д. В организациях обратная связь при управлении устанавливается посредством осуществления контроля исполнения. Принцип обратной связи является весьма универсальным фундаментальным принципом управления, действующим в технике, природе и обществе.
4. Принципы управления. Комбинированное управление.
В таких САУ принцип управления по отклонению реализуется благодаря обратной связи (двойной линии на рис. 2.2), а принцип управления по возмущению компенсационным связью (тонкие линии связи).
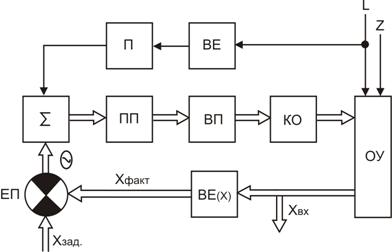
Рис. 2.2 Схема САУ с комбинированным принципом управления.
В комбинированных САУ компенсационный связь по основному возмущению устраняет составляющую погрешность, которая подталкивает этим возмущением, а благодаря действию обратной связи уменьшаются погрешности, которые вызываются второстепенными возмущающим деяниями. Часто в таких системах используют компенсационные связи с несколькими возмущениями.
Преимущества таких САУ:
- Можно добиться полной компенсации погрешности, которая вызывается основным возмущением, то есть достичь полной инвариантности;
- Они работают при действии любых возмущений благодаря обратной связи;
- Не так остро стоит проблема устойчивости, так как коэффициент передачи системы может быть существенно меньшим за счет введения компенсационного связи по основному возмущению;
- Они не так чувствительны к изменению параметров элементов САУ, чем САУ с принципом управления по возмущению, потому что есть обратная, связь по отклонению.
Таким образом, комбинированные САУ - наиболее совершенные САУ.
5. Принципы управления. Адаптивное управление.
В инженерной практике обычно стремятся по- строить возможно более простую модель управляе- мого процесса (которая тем не менее должна отра- жать основные его свойства). Наличие простых моделей позволяет, в частности, более полно изу- чить процесс управления путем имитации его с по- мощью аналоговых либо цифровых вычислитель- ных машин и в итоге выбрать наиболее подходящий режим работы системы управления. Для современного производства характерны ус- ложнение технологических процессов, ужесточение допустимых отклонений управляемого процесса от предписанных значений и т.д. Совершенствование методов управления в этих условиях предполагает разработку более сложных математических моделей управляемых процессов, позволяющих оптимизи- ровать управление, а использование усложненных моделей порождает проблему задания значений ха- рактеристик и параметров модели, нужных для формирования требуемого управления. Более того, некоторые из таких параметров могут дрейфовать во времени вследствие износа или старения тех или иных устройств и механизмов, составляющих ОУ. Иногда можно учитывать подобный дрейф парамет- ров путем регулярной замены изношенных деталей либо путем переналадки управляющей системы, но обычно это требует прерывания технологического процесса и потому может оказаться экономически невыгодным либо даже невозможным по производ- ственным причинам. Широкое внедрение современ- ных ЭВМ в процессы управления технологическими процессами позволяет контролировать изменение параметров без прерывания технологического про- цесса и использовать текущие значения параметров (либо их оценки) для формирования управляющих воздействий. Если параметры изменяются во вре- мени достаточно медленно (что бывает во многих прикладных задачах управления), то такие методы управления могут оказаться весьма эффективными, поскольку не связаны с прерыванием технологиче- ского процесса для тестирования управляемого процесса или ОУ.
8.Оптимальное управление. Критерии оптимизации.
Любая задача оптимизации может быть сведена к выбору лучшего в некотором смысле варианта из большого числа вариантов. Каждый из этих вариантов характеризуется набором чисел (или функций). Качество того или иного варианта определяется некоторым показателем — численной характеристикой, определяющей близость достижения поставленной цели при выбранном варианте.
Наилучший вариант соответствует экстремуму показателя качества, т. е. минимуму или максимуму в зависимости от конкретной задачи. Показатели качества обычно представляют собой функционалы. Эти функционалы можно рассматривать как функции, в которых роль независимых переменных играют некоторые кривые или векторы, характеризующие варианты. Функционал, зависящий от вектора, представляет собой просто функцию многих переменных. Мы далее будем рассматривать в основном функционалы, зависящие от вектора, к которым можно сводить функционалы, зависящие от функции, на основе прямых методов вариационного исчисления.
В общей форме показатель качества можно представить в виде условного математического ожидания
 . (1.1)
. (1.1)
или кратко
 . (1.2)
. (1.2)
где — функционал вектора
— функционал вектора  , зависящий также от вектора случайных последовательностей или процессов
, зависящий также от вектора случайных последовательностей или процессов , плотность распределения которого равна
, плотность распределения которого равна  ;
;  — пространство векторов
— пространство векторов  . Здесь и далее все векторы представляются столбцовыми матрицами.
. Здесь и далее все векторы представляются столбцовыми матрицами.
В выражении (1.2) явно не подчеркнута возможная зависимость функционала от известных векторов, с которой мы всегда будем сталкиваться при рассмотрении конкретных задач. К уравнению (1.2) сводится целый ряд различных по своей форме показателей качества. Так, например, весьма распространенный в теории статистических решений средний риск — байесовский критерий — определяется как
 . (1.3)
. (1.3)
В этом выражении приняты следующие обозначения:  — вероятность того, что наблюдаемый элемент относится к подмножеству
— вероятность того, что наблюдаемый элемент относится к подмножеству  множества
множества  ,
,  — условная плотность распределения вероятности па подмножестве . Далее,
— условная плотность распределения вероятности па подмножестве . Далее,  — решающее правило, зависящее от неизвестного вектора параметров
— решающее правило, зависящее от неизвестного вектора параметров  , такое, что
, такое, что
 (1.4)
(1.4)
Наконец,  — элементы платежной матрицы
— элементы платежной матрицы  , определяющие стоимость ошибочных решений.
, определяющие стоимость ошибочных решений.
Представим формулу для  в виде
в виде
 . (1.5)
. (1.5)
Отсюда следует, что  можно рассматривать как условное математическое ожидание случайной величины
можно рассматривать как условное математическое ожидание случайной величины  с некоторым распределением
с некоторым распределением 
Иногда удобно использовать показатель качества, определяющий вероятность того, что величина находится в заданных пределах  , т. е.
, т. е.
 . (1.6)
. (1.6)
Вводя новую переменную, так называемую характеристическую функцию
 (1.7)
(1.7)
можно преобразовать (1.6) к виду
 , (1.8)
, (1.8)
что совпадает по форме с (1.2).
Достижению цели соответствует минимум (например, в случае (1.3)) или максимум (например, в случае (1.6)). Поэтому функционалы часто называются также критериями оптимальности.
Дата добавления: 2018-06-01; просмотров: 1019; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!