NRZ - NonReturntoZero (без возврата к нулю)
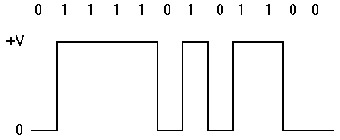
В этом варианте кодирования используется следующее представление битов:
биты 0 представляются нулевым напряжением (0 В);
биты 1 представляются напряжением +V.
Этот метод кодирования является наиболее простым и служит базой для построения более совершенных алгоритмов кодирования. Кодированию по методу NRZ присущ целый ряд недостатков:
высокий уровень постоянного напряжения (среднее значение 1/2V вольт для последовательности, содержащей равное число 1 и 0);
широкая полоса сигнала (от 0 Гц для последовательности, содержащей только 1 или только 0 до половины скорости передачи данных при чередовании 10101010);
возможность возникновения продолжительных периодов передачи постоянного уровня (длинная последовательность 1 или 0) в результате чего затрудняется синхронизация устройств;
сигнал является поляризованным.
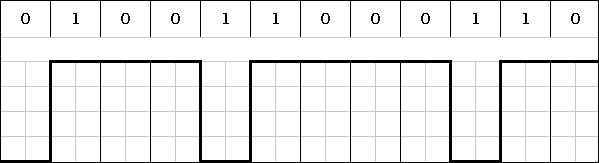
RZ - ReturntoZero (возврат к нулю)

Цифровые данные представляются следующим образом:
биты 0 представляются нулевым напряжением (0 В);
биты 1 представляются значением +V в первой половине и нулевым напряжением во второй, т.е. единице соответствует импульс напряжения продолжительностью в половину продолжительности передачи одного бита данных.
Этот метод имеет два преимущества по сравнению с кодированием NRZ:
* средний уровень напряжения в линии составляет 1/4V (вместо 1/2 V);
* при передаче непрерывной последовательности 1 сигнал в линии не остается постоянным.
Однако при использовании кодирования RZ полоса сигнала может достигать значений, равных скорости передачи данных (при передаче последовательности 1).
NRZ I - NonReturntoZeroInvertive (инверсное кодирование без возврата к нулю)
Этот метод кодирования использует следующие представления битов цифрового потока: * биты 0 представляются нулевым напряжением (0 В); * биты 1 представляются напряжением 0 или +V в зависимости от предшествовавшего этому биту напряжения. Если предыдущее напряжение было равно 0, единица будет представлена значением +V, а в случаях, когда предыдущий уровень составлял +V для представления единицы, будет использовано напряжение 0 В. Этот алгоритм обеспечивает малую полосу (как при методе NRZ) в сочетании с частыми изменениями напряжения (как в RZ), а кроме того, обеспечивает неполярный сигнал (т. е. проводники в линии можно поменять местами).
AMI - AlternateMarkInversion (поочередная инверсия единиц)
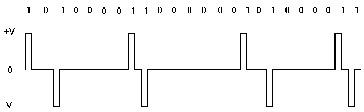
Этот метод кодирования использует следующие представления битов:
* биты 0 представляются нулевым напряжением (0 В);
* биты 1' представляются поочередно значениями +V и -V.
Этот метод подобен алгоритму RZ, но обеспечивает в линии нулевой уровень постоянного напряжения.
Недостатком метода AMI является ограничение на плотность нулей в потоке данных, поскольку длинные последовательности 0 ведут к потере синхронизации.
Протокол передачи данных — набор соглашений интерфейса логического уровня, которые определяют обмен данными между различными программами. Эти соглашения задают единообразный способ передачи сообщений и обработки ошибок при взаимодействии программного обеспечения разнесённой в пространстве аппаратуры, соединённой тем или иным интерфейсом.
Стандартизированный протокол передачи данных также позволяет разрабатывать интерфейсы (уже на физическом уровне), не привязанные к конкретной аппаратной платформе и производителю (например, USB, Bluetooth).
Сигнальный протокол используется для управления соединением — например, установки, переадресации, разрыва связи. Примеры протоколов: RTSP, SIP. Для передачи данных используются такие протоколы как RTP.
Сетево́й протоко́л — набор правил и действий (очерёдности действий), позволяющий осуществлять соединение и обмен данными между двумя и более включёнными в сеть устройствами.
Разные протоколы зачастую описывают лишь разные стороны одного типа связи. Названия «протокол» и «стек протоколов» также указывают на программное обеспечение, которым реализуется протокол.
Новые протоколы для Интернета определяются IETF, а прочие протоколы — IEEE или ISO. ITU-T занимается телекоммуникационными протоколами и форматами.
Наиболее распространённой системой классификации сетевых протоколов является так называемая модель OSI, в соответствии с которой протоколы делятся на 7 уровней по своему назначению — от физического (формирование и распознавание электрических или других сигналов) до прикладного (интерфейс программирования приложений для передачи информации приложениями).
Сетевые протоколы предписывают правила работы компьютерам, которые подключены к сети. Они строятся по многоуровневому принципу. Протокол некоторого уровня определяет одно из технических правил связи. В настоящее время для сетевых протоколов используется модель OSI (Open System Interconnection — взаимодействие открытых систем, ВОС).
Модель OSI — это 7-уровневая логическая модель работы сети. Модель OSI реализуется группой протоколов и правил связи, организованных в несколько уровней:
на физическом уровне определяются физические (механические, электрические, оптические) характеристики линий связи;
на канальном уровне определяются правила использования физического уровня узлами сети;
сетевой уровень отвечает за адресацию и доставку сообщений;
транспортный уровень контролирует очередность прохождения компонентов сообщения;
задача сеансового уровня — координация связи между двумя прикладными программами, работающими на разных рабочих станциях;
уровень представления служит для преобразования данных из внутреннего формата компьютера в формат передачи;
прикладной уровень является пограничным между прикладной программой и другими уровнями — обеспечивает удобный интерфейс связи сетевых программ пользователя.
Другая модель — стек протоколов TCP/IP — содержит 4 уровня:
канальный уровень (link layer),
сетевой уровень (Internet layer),
транспортный уровень (transport layer),
прикладной уровень (application layer).
Примеры сетевых протоколов[править | править вики-текст]
TCP/IP — набор протоколов передачи данных, получивший название от двух принадлежащих ему протоколов: TCP (англ. Transmission Control Protocol) и IP (англ. Internet Protocol)[1]
Наиболее известные протоколы, используемые в сети Интернет:
HTTP (Hyper Text Transfer Protocol) — это протокол передачи гипертекста. Протокол HTTP используется при пересылке Web-страниц между компьютерами, подключенными к одной сети.
FTP (File Transfer Protocol) — это протокол передачи файлов со специального файлового сервера на компьютер пользователя. FTP дает возможность абоненту обмениваться двоичными и текстовыми файлами с любым компьютером сети. Установив связь с удаленным компьютером, пользователь может скопировать файл с удаленного компьютера на свой или скопировать файл со своего компьютера на удаленный.
POP3 (Post Office Protocol) — это стандартный протокол почтового соединения. Серверы POP обрабатывают входящую почту, а протокол POP предназначен для обработки запросов на получение почты от клиентских почтовых программ.
SMTP (Simple Mail Transfer Protocol) — протокол, который задает набор правил для передачи почты. Сервер SMTP возвращает либо подтверждение о приеме, либо сообщение об ошибке, либо запрашивает дополнительную информацию.
TELNET — это протокол удаленного доступа. TELNET дает возможность абоненту работать на любой ЭВМ находящейся с ним в одной сети, как на своей собственной, то есть запускать программы, менять режим работы и так далее. На практике возможности ограничиваются тем уровнем доступа, который задан администратором удаленной машины.
Другие протоколы:
DTN — протокол, предназначенный для сетей дальней космической связи IPN, которые используются NASA.
10. Помехозащищенное кодирование.
Общая идея помехоустойчивого кодирования состоит в том, что из всех возможных кодовых слов считаются допустимыми не все, а лишь некоторые из них. Например, в коде с контролем по четности считаются допустимыми лишь слова с четным числом единиц. Ошибка превращает допустимое слово в недопустимое и поэтому обнаруживается.
Помехоустойчивые коды делятся на блоковые, делящие информацию на фрагменты постоянной длины и обрабатывающие каждый из них в отдельности, и свёрточные, работающие с данными как с непрерывным потоком.
Блоковые коды характеризуются так называемым минимальным кодовым расстоянием. Вообще, расстоянием по Хэммингу между двумя кодовыми словами называется число разрядов, в которых они различны. При этом в качестве минимального кодового расстояния выбирается наименьшее из всех расстояний по Хэммингу для любых пар различных кодовых слов, образующих код.
Например, пусть мы используем только трехразрядные двоичные слова. Всего таких кодовых слов может быть восемь. Те кодовые слова, которые отличаются только на одну единицу, называются соседними. Например, кодовые слова 101 и 111 – соседние, так как отличаются только средним разрядом, а слова 101 и 110 – не соседние, так как у них отличаются два последних разряда. Изобразим все трехразрядные двоичные комбинации и соединим линией соседние кодовые слова. Тогда мы получим схему, как на рис. 14.1. Минимальное кодовое расстояние между словами обычного, не помехоустойчивого кода равно единице.

Рис. 14.1. Трехразрядные двоичные кодовые слова
Платой за помехоустойчивость является необходимость увеличения длины слов по сравнению с обычным кодом. В данном примере только два разряда являются информационными. Это они образуют четыре разных слова. Третий разряд является контрольным и служит только для увеличения расстояния между допустимыми словами. В передаче информации контрольный разряд не участвует, так как является линейно зависимым от информационных. Код с контролем по четности, рассмотренный в качестве примера, позволяет обнаружить одиночные ошибки в блоках данных при передаче данных. Однако он не сможет обнаружить двукратные ошибки потому, что двукратная ошибка переводит кодовое слово через промежуток между допустимыми словами и превращает его в другое допустимое слово.
Таким образом, для того чтобы код приобрел способность к обнаружению и коррекции ошибок, необходимо отказаться от его безызбыточности. Для этого и разделяют всё множество возможных комбинаций двоичных символов на два подмножества: допустимых кодовых слов и недопустимых. Разбиение осуществляется таким образом, чтобы увеличить минимальное кодовое расстояние между допустимыми словами. В этом случае любая однократная ошибка превращает допустимое кодовое слово в недопустимое, что позволяет её обнаружить.
Естественно, что введение дополнительных контрольных разрядов увеличивает затраты на хранение или передачу кодированной информации. При этом фактический объем полезной информации остается неизменным. В этом случае можно говорить об избыточности помехоустойчивого кода, которую формально можно определить как отношение числа контрольных разрядов к общему числу разрядов кодового слова.
Мы уже отмечали, что контрольные разряды не передают информацию и в этом смысле бесполезны. Относительное число контрольных разрядов называется избыточностью Q помехоустойчивого кода

где n – общее число двоичных разрядов в блоке, а k – число контрольных разрядов.
Избыточность является важной характеристикой кода, причем чрезмерное увеличение избыточности нежелательно. Важной задачей теории информации является синтез кодов с минимальной избыточностью, обеспечивающих заданную обнаруживающую и корректирующую способность.
11 Оптимальным кодированием
называется процедура преобразования символов первичного алфавита m1 в кодовые слова во вторичном алфавите m2, при котором средняя длина сообщений во вторичном алфавите имеет минимально возможную длину.
Коды, представляющие первичные алфавиты с неравномерным распределением символов, имеющие среднюю минимальную длину кодового слова во вторичном алфавите, называются оптимальными неравномерными кодами (ОНК).
Эффективность ОНК оценивают при помощи двух коэффициентов:
1. коэффициента статического сжатия
 ,
,
который характеризует уменьшение количества двоичных знаков на символ сообщения при применении ОНК по сравнению с применением методов нестатистического кодирования.
2. коэффициента относительной эффективности
 ,
,
который показывает, насколько используется статическая избыточность передаваемого сообщения.
Из свойств оптимальных кодов вытекают принципы их построения:
- выбор каждого кодового слова необходимо производить так, чтобы содержащееся в нем количество информации было максимальным,
- буквам первичного алфавита, имеющим большую вероятность, присваиваются более короткие кодовые слова во вторичном алфавите.
Принципы оптимального кодирования определяют методики построения оптимальных кодов.
Построение ОНК по методике Шеннона-Фано для ансамбля из M сообщений сводится к следующей процедуре:
1) множество из M сообщений располагают в порядке убывания вероятностей;
2) первоначальный ансамбль кодируемых сигналов разбивают на две группы таким образом, чтобы суммарные вероятности сообщений обеих групп были по возможности равны;
3) первой группе присваивают символ 0, второй группе символ 1;
4) каждую из подгрупп делят на две группы так, чтобы их суммарные вероятности были по возможности равны;
5) первым подгруппам каждой из групп вновь присваивают 0, а вторым - 1, в результате чего получают вторые цифры кода. Затем каждую из четырех подгрупп вновь делят на равные (с точки зрения суммарной вероятности) части и т. д. До тех пор, пока в каждой из подгрупп останется по одной букве.
Функция Med находит медиану указанной части массива Р [b..e], т.е. определяет такой индекс m (b ≤ m < e), что сумма элементов Р [b..m] наиболее близка к сумме элементов Р [m + 1..e].
Примечание. При каждом удлинении кодов в одной части коды удлиняются нулями, а в другой части – единицами. Таким образом, коды одной части не могут быть префиксами другой. Удлинение кода заканчивается тогда и только тогда, когда длина части равна 1, то есть остается единственный код. Таким образом, схема построения префиксная, а потому разделимая, т.е. коды не требуют разделителя.
12. Промышленные стандарты для передачи данных.
RS-485 — стандарт физического уровня для асинхронного интерфейса.Регламентирует электрические параметры полудуплексной многоточечной дифференциальной линии связи типа «общая шина».
Стандарт приобрел большую популярность и стал основой для создания целого семейства промышленных сетей, широко используемых в промышленной автоматизации.
Технические характеристики интерфейса RS-485
В стандарте RS-485 для передачи и приёма данных используется одна витая пара проводов, иногда сопровождаемая экранирующей оплеткой или общим проводом.
Передача данных осуществляется с помощью дифференциальных сигналов. Разница напряжений между проводниками одной полярности означает логическую единицу, разница другой полярности — ноль.
Стандарт RS-485 оговаривает только электрические и временные характеристики интерфейса.
Стандарт RS-485 не оговаривает:
параметры качества сигнала (допустимый уровень искажений, отражения в длинных линиях),
типы соединителей и кабелей,
гальваническую развязку линии связи,
протокол обмена.
Электрические и временные характеристики интерфейса RS-485
До 32 приёмопередатчиков в одном сегменте сети.
Максимальная длина одного сегмента сети: 1200 метров.
В один момент активным может быть только один передатчик.
Максимальное количество узлов в сети — 256 с учётом магистральных усилителей.
Характеристика скорость обмена/длина линии связи:
62,5 кбит/с 1200 м (одна витая пара),
375 кбит/с 500 м (одна витая пара),
500 кбит/с,
1000 кбит/с,
2400 кбит/с 100 м (две витых пары),
10000 кбит/с 10 м.
Примечание: Скорости обмена 62,5 кбит/с, 375 кбит/с, 2400 кбит/с оговорены стандартом RS-485. На скоростях обмена свыше 500 кбит/с рекомендуется использовать экранированные витые пары.
Сигналы
Передача данных идёт по двум линиям, A и B.
Логическая единица: (A-B)> +200 мВ.
Логический ноль: (A-B) < −200 мВ.
В момент отсутствия активного передатчика на шине уровень сигнала в линиях не определен. Для предотвращения ситуации, когда разница между входами A и B меньше 200мВ (неопределённое состояние), иногда применяется смещение с помощью резисторов или специальной схемы. Если состояние линий не определено, то приёмники могут принимать сигнал помехи. Некоторые протоколы предусматривают передачу служебных последовательностей для стабилизации приёмников и уверенного начала приёма.
Интерфейс является полудуплексным: узел не может одновременно и принимать, и передавать данные.
Согласование
При большой длине линии связи возникают эффекты длинных линий. Причина этому — распределенные индуктивные и ёмкостные свойства кабеля. Как следствие, сигнал, переданный в линию одним из узлов, начинает искажаться по мере распространения в линии, возникают сложные резонансные явления. Поскольку на практике кабель на всей длине имеет одинаковую конструкцию и, следовательно, одинаковые распределенные параметры погонной ёмкости и индуктивности, то это свойство кабеля характеризуют специальным параметром — волновым сопротивлением. Не вдаваясь в теоретические подробности, можно сказать, что в кабеле, на приёмном конце которого подключен резистор с сопротивлением, равным волновому сопротивлению кабеля, резонансные явления значительно ослабляются. Называется такой резистор терминатором. Для сетей RS485 они ставятся на каждой оконечности длинной линии (поскольку обе стороны могут быть приёмными). Волновое сопротивление наиболее распространенных витых пар CAT5 составляет 100 Ом. Другие витые пары могут иметь волновое сопротивление 150 Ом и выше. Плоские ленточные кабелидо 300 Ом.
Контакты RS-485
Хотя стандартом это не определено, обычно разъем для полудуплексной связи состоит из двух или трех контактов:
A или «+» (TxD+/RxD+), неинвертированный[11].
B или «−» (TxD-/RxD-), инвертированный.
Опциональный общий провод. Соединение общих шин устройств не обязательно, но улучшает устойчивость работы интерфейса. При наличии гальванической развязки не нужен.

Интерфейс RS-422
Интерфейс RS-422 (RecommendedStandard 422) очень схож с другим сетевым интерфейсом RS-485. Эти интерфейсы электрически совместимы между собой, хотя и имеют некоторые различия, которые будут рассмотрены ниже.
Для симметричной передачи на большие расстояния (в отличии от RS-232, длинна которого до 15 м) используется интерфейс RS-422, для которого информативным сигналом является разница потенциалов между проводниками А и В.
В отличие от RS-485, у RS-422 присутствует по 2 приемника и передатчика. То есть устройства с таким интерфейсом могут работать в дуплексном режиме (fullduplex).
Количество устройств в одном сегменте – 1 передатчик + 10 приемников. Топологии – каскадная, PTP («точка-точка», point-to-point).
Длинна сегмента — до 1500 м. Скорость – от 10 кб/с до 10 Мб/с.
Стандарт RS-422 поддерживает только однамостерные протоколы обмена.
Также стандарт не определяет тип коннекторов для интерфейса, но чаще всего используются DB-25 и DC-37.
Описание RS-422. Технические характеристики:
Порог срабатывания |Ua — Ub| — 0.2 В
Допустимое значение синфазной помехи – от -6.8 В до +6.8 В
Допустимый потенциал на входах – от -7 В до +7 В
Минимальное сопротивление нагрузки – 100 Ом
Терминальные сопротивления устанавливаются на дальнем конце от передатчика
Ток короткого замыкания – <150 мА на Gnd
CAN
CAN (англ. ControllerAreaNetwork — сеть контроллеров) — стандарт промышленной сети, ориентированный прежде всего на объединение в единую сеть различных исполнительных устройств и датчиков. Режим передачи — последовательный, широковещательный, пакетный.
Общие сведения
CAN является синхронной шиной с типом доступа CollisionResolving (CR, разрешение коллизии), который, в отличие от CollisionDetect (CD, обнаружение коллизии) сетей (Ethernet), детерминировано (приоритетно) обеспечивает доступ на передачу сообщения, что особо ценно для промышленных сетей управления (fieldbus). Передача ведётся кадрами. Полезная информация в кадре состоит из идентификатора длиной 11 бит (стандартный формат) или 29 бит (расширенный формат, надмножество предыдущего) и поля данных длиной от 0 до 8 байт. Идентификатор говорит о содержимом пакета и служит для определения приоритета при попытке одновременной передачи несколькими сетевыми узлами.
Рецессивные и доминантные биты
Для абстрагирования от среды передачи спецификация CAN избегает описывать двоичные значения как «0» и «1». Вместо этого применяются термины «рецессивный» и «доминантный», при этом подразумевается, что при передаче одним узлом сети рецессивного бита, а другим доминантного, принят будет доминантный бит. Стандарт сети требует от «физического уровня», фактически, единственного условия: чтобы доминантный бит мог подавить рецессивный, но не наоборот
Виды кадров
Кадр данных (dataframe) — передаёт данные;
Кадр удаленного запроса (remoteframe) — служит для запроса на передачу кадра данных с тем же идентификатором;
Кадр перегрузки (overloadframe) — обеспечивает промежуток между кадрами данных или запроса;
Кадр ошибки (errorframe) — передаётся узлом, обнаружившим в сети ошибку.
Кадры данных и запроса отделяются от предыдущих кадров межкадровым промежутком.
Арбитраж доступа
При свободной шине любой узел может начинать передачу в любой момент. В случае одновременной передачи кадров двумя и более узлами проходит арбитраж доступа: передавая идентификатор, узел одновременно проверяет состояние шины. Если при передаче рецессивного бита принимается доминантный — считается, что другой узел передаёт сообщение с большим приоритетом, и передача откладывается до освобождения шины. Таким образом, в отличие, например, от Ethernet в CAN не происходит непроизводительной потери пропускной способности канала при коллизиях. Цена этого решения — возможность того, что сообщения с низким приоритетом никогда не будут переданы.
Контроль ошибок
CAN имеет несколько механизмов контроля и предотвращения ошибок:
Контроль передачи: при передаче битовые уровни в сети сравниваются с передаваемыми битами.
Дополняющие биты (bitstuffing): после передачи пяти одинаковых битов подряд автоматически передаётся бит противоположного значения. Таким образом кодируются все поля кадров данных или запроса, кроме разграничителя контрольной суммы, промежутка подтверждения и EOF.
Контрольная сумма: передатчик вычисляет её и добавляет в передаваемый кадр, приёмник считает контрольную сумму принимаемого кадра в реальном времени (одновременно с передатчиком), сравнивает с суммой в самом кадре и в случае совпадения передаёт доминантный бит в промежутке подтверждения.
Контроль значений полей при приёме.
Разработчики оценивают вероятность невыявления ошибки передачи как 4,7×10−11.
Диапазон скоростей
Все узлы в сети должны работать с одной скоростью. Стандарт CAN не определяет скоростей работы, но большинство как отдельных, так и встроенных в микроконтроллеры адаптеров позволяют плавно менять скорость в диапазоне, по крайней мере, от 20 килобит в секунду до 1 мегабита в секунду. Существуют решения, выходящие далеко за рамки данного диапазона.
| 1 Мбит/с | 40 м |
| 500 Кбит/с | 100 м |
| 125 Кбит/с | 500 м |
| 10 Кбит/с | 5000 м |
Использование оптопар для защиты устройств от высоковольтных помех в сети ещё больше сокращает предельную длину. Сильно разветвлённые сети (паутина) также снижают скорость из-за множества отражений сигнала и большей электрической ёмкости шины.
Применение CAN в автомобилестроении
Во всех высокотехнологичных системах современного автомобиля применяется CAN-протокол для связи ЭБУ с дополнительными устройствам и контроллерами исполнительных механизмов и различных систем безопасности. В некоторых автомобилях CAN связывает IMMO, приборные панели, SRS блоки и т. д.
Дата добавления: 2018-06-01; просмотров: 1102; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!