Принципы автоматического управления
САУ состоит из управляющих устройств (УУ) и объекта управления (ОУ). Величины, характеризующие состояние ОУ, называются выходными или управляемыми. Воздействия, поступающие на вход УУ, и несущие в себе информацию о требуемом значении управляемого параметра, называются задающими. Воздействия, вырабатываемые регулятором в составе УУ и непосредственно изменяющие состояние ОУ через исполнительные механизмы, называются управляющими. Регулятор может быть реализован в виде отдельного технического устройства, например, регулятор температуры в холодильнике это электронная схема, которая включает охлаждение, если температура становится выше заданной. В современных системах управления ТС роль регуляторов выполняют микропроцессорные устройства (контроллеры) и компьютеры.
Воздействия внешней среды, вызывающее несанкционированное отклонение управляемой величины от заданного значения, называются возмущающими воздействиями. Возмущения носят случайный характер и мешают осуществлению управления. Задающие и возмущающие воздействия объединяют в группу входных воздействий.
САУ может быть реализована с использованием следующих фундаментальных принципов управления [1–3, 7]:
1) управления по задающему воздействию или принципа разомкнутого управления;
2) управления по отклонению или принципа обратной связи;
3) управления по возмущению или принципа компенсации.
|
|
|
2.1.1. Принцип разомкнутого управления (управление по
задающему воздействию)
Сущность принципа разомкнутого управления состоит в том, что управление строится только на основе заданного алгоритма функционирования и не контролируется по фактическому значению управляемой величины, то есть текущее состояние ОУ не учитывается при выработке управляющих воздействий. Процесс работы системы не зависит непосредственно от результата ее воздействия на объект управления.
Структурная схема управления имеет вид разомкнутой цепи (рис. 2), т.е. управляющие устройства оказывают воздействие на объект управления, но обратное воздействие отсутствует.
| Рис. 2 |
Задающее устройство подает задающее воздействие x(t), которое преобразуется управляющими устройствами в управляющее воздействие z(t). Под воздействием управления состояние объекта управления ОУ, характеризуемое управляемой величиной y(t), изменяется так, чтобы значение y(t) было равно требуемому значению, величина которого определяется задающим воздействием x(t). Наличие возмущающего воздействия f(t) приводит к тому, что действительное значение управляемой величины y(t) отличается от заданного, то есть появляется ошибка управления. Если действие возмущений является постоянным или периодическим, ошибка управления накапливается, и, в пределе, может произойти отказ системы. Таким образом, принцип разомкнутого управления не применим в условиях значительных помех и возмущений. В отсутствии возмущений воспроизведение заданной величины обеспечивается жесткостью характеристик устройств, входящих в состав схемы. Разомкнутое управление в чистом виде применяется редко и только в простых схемах [1–3, 7].
|
|
|
Рассмотрим разомкнутую систему управления температурой электронагревательного элемента (рис. 3).
| Рис. 3 |
В качестве управляющего устройства в схеме (см. рис. 3) используется потенциометр – переменный резистор, положение подвижного контакта которого определяет величину управляющего напряжения Uуп как долю от 0 до 100% входного напряжения Uвх, подаваемую на электронагревательный элемент. В бытовых электрообогревателях необходимая температура задается вручную с использованием регулятора или позиционного переключателя. В промышленных системах, например, в хлебопекарных печах, закон изменения температуры нагрева может задаваться профилем кулачка [8].
Рассмотрим ситуацию, связанную с возникновением в разомкнутой САУ ошибки управления в условиях действия возмущения на примере диаграмм работы разомкнутой САУ температурой нагрева бытового электрообогревателя с двухпозиционным переключателем (рис. 4). Пусть переключатель, кроме положения «выкл.» имеет два положения, соответствующие минимальной и максимальной температуре нагрева. До момента времени t0 электрообогреватель какое-то время был включен на минимальную температуру нагрева – положение переключателя соответствовало Smin, и температура уже достигла значения Тmin. Система находится в установившемся состоянии равновесия, которое описывается равенством:
|
|
|
 ,
,
где k – коэффициент статического преобразования САУ. Состояние равновесия сохраняется в системе до момента времени t1, но в момент времени t1 пользователь электрообогревателя решает увеличить температуру нагрева до максимума и переключает регулятор в положение «max».
Поскольку изменение положения переключателя происходит практически мгновенно, изменение величины задающего воздействия S(t) в момент времени t1 можно изобразить идеальной ступенькой (см. рис. 4). Однако процесс преобразования электрической энергии в тепловую является бóлее инерционным, поэтому температура нового значения достигнет не сразу, а за некоторое время – время переходного процесса tр. Закон изменения температуры во время переходного процесса носит плавный характер. После завершения переходного процесса равновесие в системе восстановиться – с момента времени t1 + tр выполняется равенство:
|
|
|
 .
.
Установленное равновесие будет сохраняться в системе до момента времени t2, в который в системе начинает действовать некое возмущение. Предположим, что это возмущение состоит в падении входного напряжения управляющего устройства (см. рис. 3). В результате, при неизменном положении регулятора S(t2)=Smax температура электрообогревателя начнет понижаться, и, после завершения переходного процесса в момент времени t2 + tр достигнет некоторого нового значения Т1, отличного от требуемого Тmax.

Система придет в состояние равновесия, но в этом состоянии будет иметь место статическая ошибка управления Dст, равная величине отклонения фактического, установившегося после завершения переходного процесса значения управляемой величины от заданного значения (см. рис. 4):

Рассмотрим пример еще одной разомкнутой системы: САУ скоростью вращения привода исполнительного механизма (ИМ) технологической системы (рис. 5), состоящая из электромашинного усилителя мощности и двигателя постоянного тока.
| Рис. 5 |
Чтобы ротор двигателя вращался с требуемой скоростью (частотой) wим(t), необходимо на его вход (якорную обмотку) подавать определенное напряжение Uя(t) для обеспечения необходимого момента вращения. Это напряжение снимается с выхода электромашинного усилителя. В свою очередь на обмотку управления усилителя подается задающее напряжение Uз(t), снимаемое с подвижного контакта потенциометра R (переменного резистора). Для задания требуемой требуемого значения скорости контакт потенциометра устанавливается в соответствующее положение, т.е. он является задающим устройством. Однако в процессе управления скорость может отклониться от заданного значения под действием возмущений, например, при изменении момента нагрузки на валу двигателя. В этом случае в системе возникнет неустранимая внутрисистемными средствами, т.е. без вмешательства человека, статическая ошибка управления.
2.1.2. Принцип обратной связи (управление по отклонению)
При реализации управления по отклонению управляющее воздействие на ОУ вырабатывается как функция отклонения текущего значения управляемой величины y(t) от ее заданного значения yзд(t), которое определяется задающим воздействием:
 ,
,
где k – коэффициент пропорциональности между величиной задающего воздействия x(t) и заданным значением управляемой величины yзд(t), равный коэффициенту статического преобразования САУ. Схема управления содержит обратную связь, то есть управляемая величина с выхода системы подается на ее вход – такая обратная связь называется общей. Структурная схема системы является замкнутой (рис. 6–а). На входе системы элементом сравнения производится определение величины рассогласования (t) между заданным и действительным значением управляемой величины:
 .
.
Обратная связь такого типа называется отрицательной. Управляющие устройства в системах управления по отклонению работают таким образом, чтобы все время сводить рассогласование к нулю. Универсальность и эффективность принципа управления по отклонению состоит в том, что он позволяет реализовать заданный закон изменения управляемой величины y(t) независимо от того, изменение какого из входных воздействий – задающего x(t), внутреннего и внешнего возмущения f(t) – вызвало возникновение рассогласования. САУ по отклонению реагирует на интегрированное внешнее воздействие, проявляющееся в изменении управляемой величины.
К достоинствам САУ по отклонению относятся простота технической реализации, удовлетворительная точность управления, меньшая чувствительность к изменениям внутренних параметров системы.



К недостаткам систем с обратной связью следует отнести невысокое быстродействие, обусловленное тем, что действие системы направлено на ликвидацию рассогласования: САУ сначала допускает изменение управляемой величины под воздействием внешних или внутренних возмущений, а потом его ликвидирует. При управлении по отклонению влияние возмущающих воздействий на управляемую величину не устраняется, а только уменьшаются последствия этого влияния. Принцип ориентирован не на причину, вызывающую отклонение управляемой величины от заданного значения, а на следствие в виде возникающего рассогласования [1–3, 7].
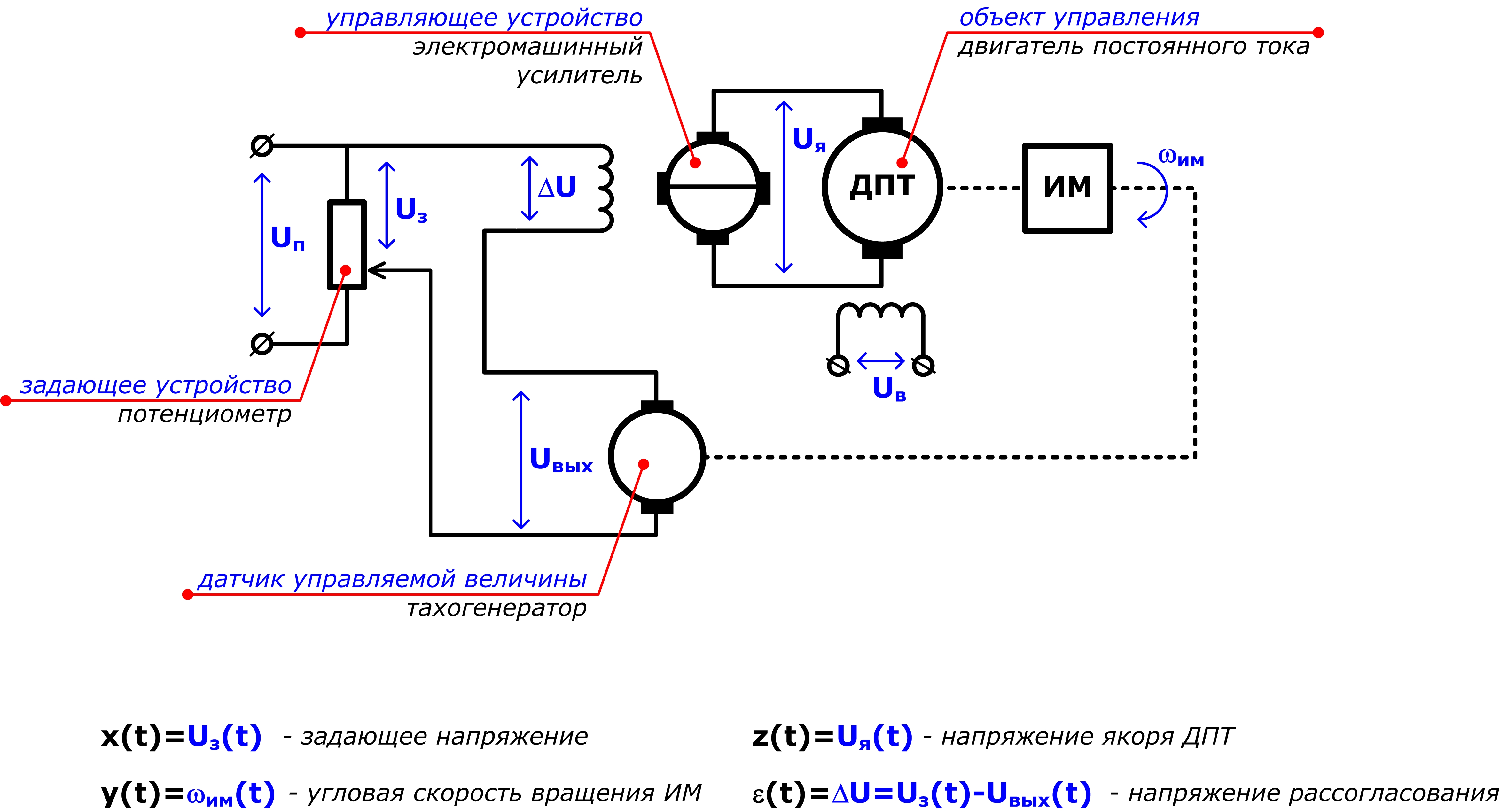
Рассмотрим в качестве примера САУ по отклонению скоростью вращения привода исполнительного механизма (ИМ) технологической системы (рис. 7). Двигатели постоянного тока широко применяются в качестве промышленных электроприводов благодаря возможности плавного регулирования скорости (частоты) вращения за счет изменения напряжения на якорной обмотке при постоянном напряжении на обмотке возбуждения.
Целью управления в рассматриваемой САУ является обеспечение заданного значения скорости вращения исполнительного механизма wим(t).
Задатчиком желаемого значения скорости вращения является потенциометр (переменный резистор) – положение его подвижного контакта определяет величину задающего напряжения Uз(t) как долю от напряжения питания Uп(t). В качестве датчика используется тахогенератор –преобразователь мгновенного значения угловой скорости вращения вала в пропорциональный электрический сигнал:
 ,
,
где  – коэффициент пропорциональности (статического преобразования) тахогенератора.
– коэффициент пропорциональности (статического преобразования) тахогенератора.
Разность напряжений (рассогласование) DU(t) = Uз(t) – Uвых(t) подается на обмотку управления управляющего устройства – электромашинного усилителя, что приводит к изменению управляющего воздействия – напряжения якоря ДПТ Uя(t). Это приводит к изменению скорости вращения ротора ДПТ и, соответственно, к ликвидации рассогласования между действительным текущим значением скорости вращения ИМ и требуемым (заданным) значением. Заметим, что в качестве источника энергии для ДПТ может быть использован не только электромашинный усилитель, но и генератор постоянного тока или тиристорный преобразователь.
Возмущениями в данной САУ могут являться изменение момента нагрузки на валу двигателя, изменение коэффициента усиления электромашинного усилителя и т.д. [2, 9, 10].

Рассмотрим особенности управления по отклонению на примере диаграмм работы САУ скорости вращения ИМ (рис. 8).
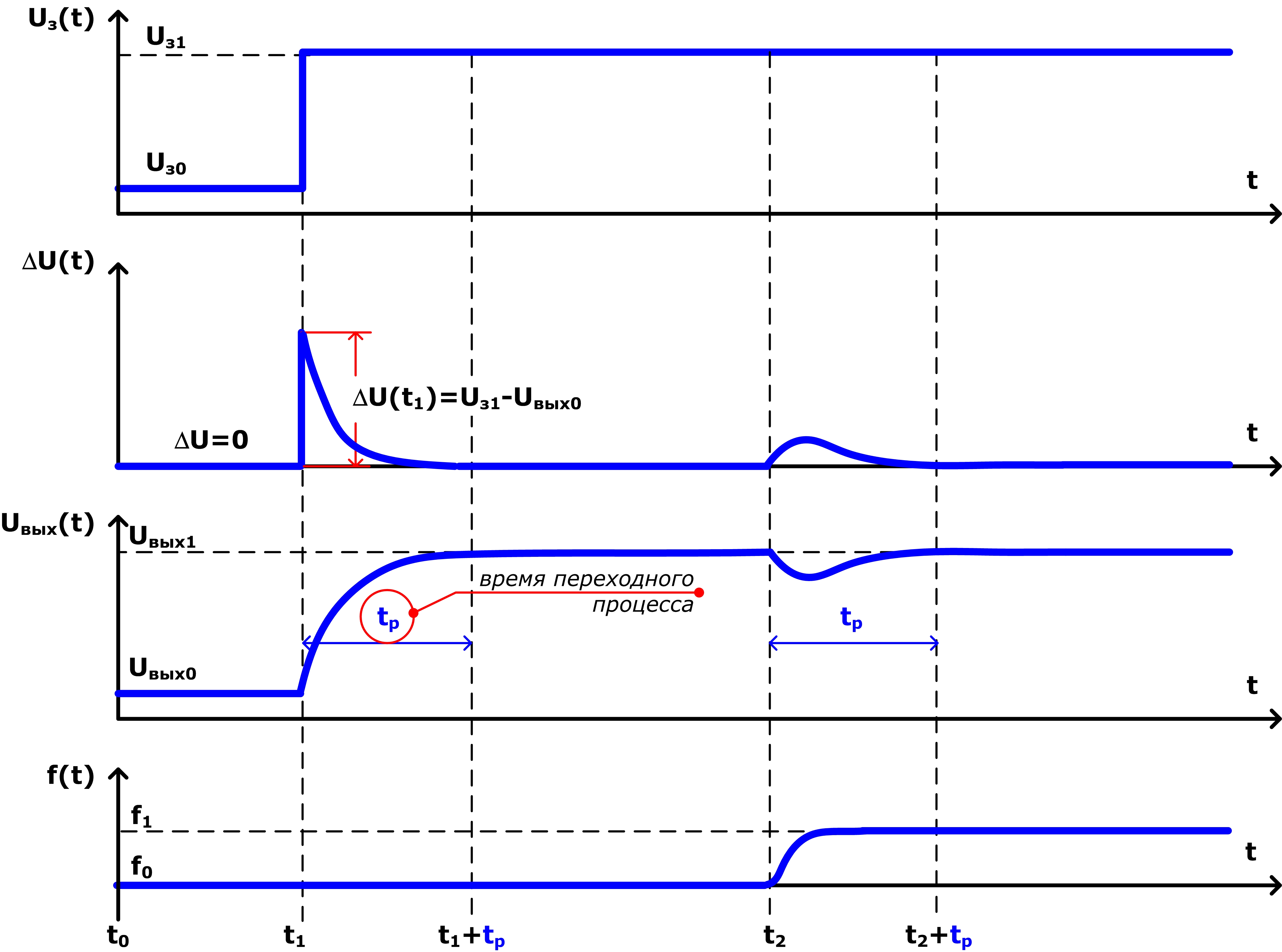
До момента времени t0 САУ уже некоторое время функционировала и пришла к установившемуся состоянию равновесия, которое описывается равенством заданного и реального значений скорости вращения ИМ, и, соответственно, равенством значений задающего напряжения и напряжения обратной связи, снимаемого с датчика скорости – тахогенератора:
Uз0 = Uвых0.
При этом величина рассогласования DU = 0. Состояние равновесия сохраняется в системе до момента времени t1.
В момент времени t1 величина задающего напряжения в соответствии с алгоритмом управления возрастает до значения Uз1. Это приводит к нарушению равновесия в системе и возникновению рассогласования, которое имеет максимальное значение в момент ступенчатого изменения задающего воздействия:
 .
.
Управляющее устройство – электромашинный усилитель – отработает возникшее рассогласование увеличением напряжения якоря двигателя и требуемое значение скорости вращения установиться за время переходного процесса tp, определяемое инерционностью элементов САУ, а рассогласование снова станет равным нулю (см. рис. 8). Установленное равновесие будет сохраняться в системе до момента времени t2, в который в системе начинает действовать некое возмущение. Предположим, что возмущение состоит в несанкционированном увеличении нагрузки на валу двигателя, т.е. до момента времени t2 нагрузка имела номинальное значение, на которое рассчитана работа САУ, и возмущение в системе отсутствовало (f0 = 0). Но в момент времени t2 нагрузка начинает возрастать и за некоторое время достигает значения f1.
Под действием возмущения начнет уменьшаться скорость вращения ИМ (см. рис. 8), а величина рассогласования согласованно возрастать, т.к. при постоянном значении задающего воздействия Uз1 с момента времени t2 убывает величина Uвых(t). Но вне зависимости от причины возникновения рассогласования усилитель будет его отрабатывать изменением напряжения якоря. Скорость вращения ИМ вернется к заданному значению за время переходного процесса tp, и к моменту времени t2+tp рассогласование снова станет равным нулю, т.е. система придет к состоянию равновесия:
 .
.

Т.о. в САУ, реализованной по принципу управления по отклонению в процессе функционирования в течение переходного процесса имеет место динамическая ошибка управления, что обусловлено инерционностью элементов САУ по сравнению источником задающего воздействия. Однако в установившемся режиме статическая ошибка управления отсутствует, даже если предшествующий переходной процесс был вызван действием возмущения.
Важно заметить, что САУ по отклонению не способны ликвидировать последствия влияния вообще всех возмущений. Вышесказанное относиться только к тем возмущениям, последствия влияния которых устранимы управляющим воздействием САУ. Например, если в САУ управления скоростью вращения привода (см. рис. 7) произойдет разрыв обмотки возбуждения двигателя, то никакими средствами САУ ликвидировать последствия этого не удастся – двигатель остановится.
| ПРИМЕРЫ других систем управления по отклонению. | 
|
2.1.3. Принцип компенсации (управление по возмущению)
В случае, когда изменение состояния ОУ под действием одного или нескольких наиболее критических возмущений недопустимо, используют принцип управления по возмущению. Сущность принципа состоит в том, что измеренное датчиком возмущение преобразуется в воздействие, подаваемое на УУ, которое формирует управляющее воздействие z(t) с учетом не только величины задающего воздействия x(t), но и величины возмущения f(t). В результате управляющее воздействие на ОУ компенсирует (предотвращает) влияния данного возмущения на управляемую величину y(t). Структурная схема САУ по возмущению приведена на рис. 6–б.
Принцип управления по возмущению ориентирован не на следствие, как принцип обратной связи, а на причину, нарушающее равновесие объекта управления, т.е. основное возмущающее воздействие, и преобразование его в управляющее воздействие. К достоинствам САУ, реализованных по принципу управления по возмущению, относится бόльшая оперативность по сравнению с системами управления по отклонению, т.к. возмущение может быть скомпенсировано до появления значимого рассогласования между заданным и текущим значением управляемой величины.
Недостатком систем управления по возмущению является то, что они компенсируют влияние одного или нескольких заранее определенных возмущений и не могут предотвратить влияние на управляемую величину других возмущающих воздействий. По отношению к неучтенным возмущениям, для которых не реализован контур компенсации, эти системы ведут себя как системы разомкнутого управления. Процесс управления не зависит от результатов – управляемая величина не измеряется и не производится никаких действий, если она не соответствует требуемому значению, и под действием неучтенных возмущений возникает статическая ошибка управления [2, 7, 10, 11].
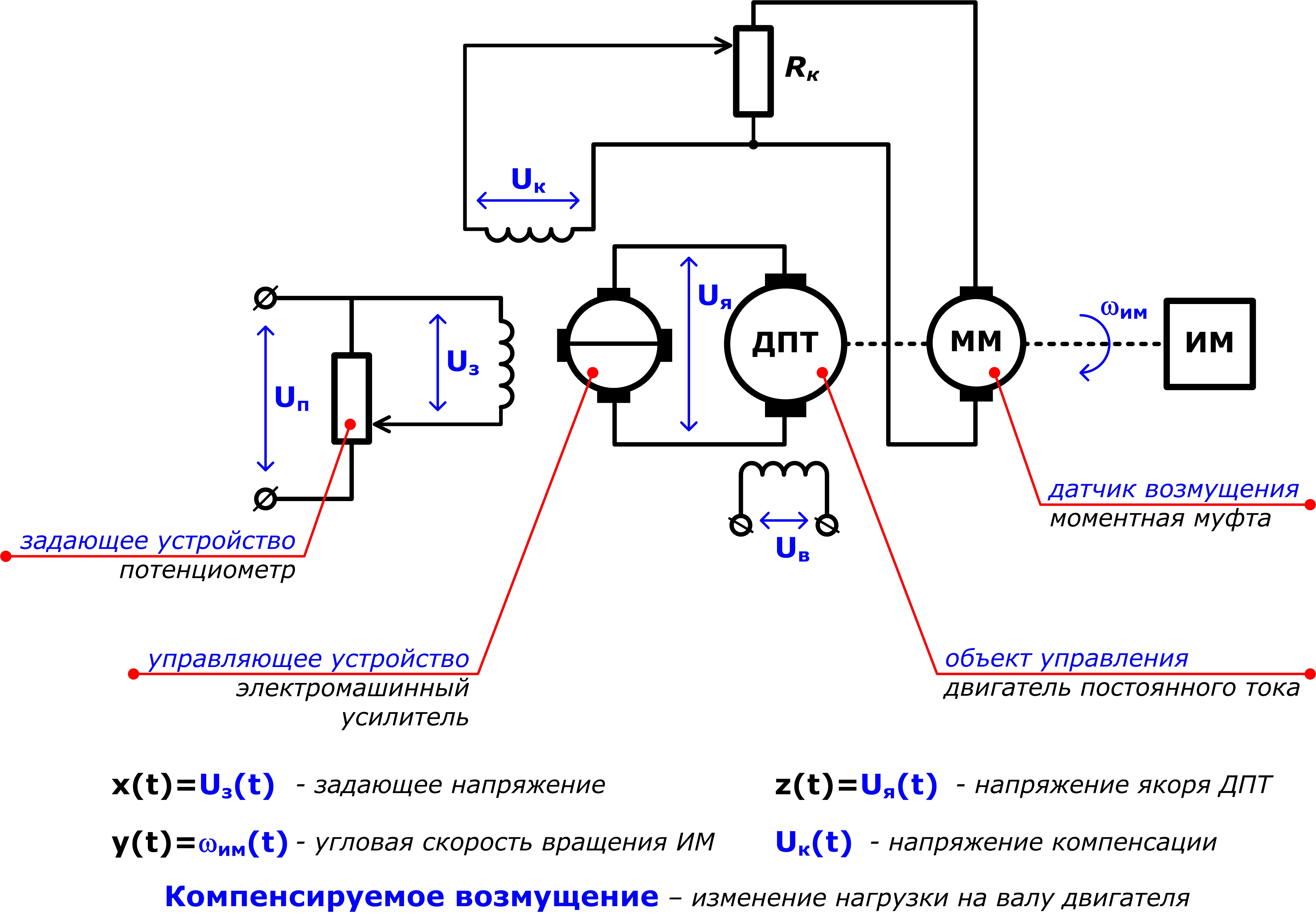
Рассмотрим в качестве примера САУ по отклонению скоростью вращения привода исполнительного механизма (ИМ) технологической системы (рис. 9). Целью управления в рассматриваемой САУ является обеспечение заданного значения скорости вращения исполнительного механизма wим(t) в условиях изменяющейся нагрузки на валу двигателя (основное возмущение). Задатчиком желаемого значения скорости вращения как и в схеме с обратной связью (см. рис. 7) является потенциометр – положение его подвижного контакта определяет величину задающего напряжения Uз(t) как долю от напряжения питания Uп(t). В качестве датчика возмущения используется моментная муфта: ее выходное напряжение (напряжение компенсации) пропорционально моменту нагрузки. Доля этого напряжения, определяемая положением подвижного контакта потенциометра контура компенсации Rк, составляет величину напряжения компенсации  . Задающее напряжение и напряжение компенсации подаются на обмотки управления, и их магнитодвижущие силы складываются в электромашинном усилителе, который в этой схемы выполняет две функции: сумматора и усилителя.
. Задающее напряжение и напряжение компенсации подаются на обмотки управления, и их магнитодвижущие силы складываются в электромашинном усилителе, который в этой схемы выполняет две функции: сумматора и усилителя.
При увеличении момента нагрузки Мн напряжение компенсации Uк увеличивается, что приводит к возрастанию магнитодвижущей силы обмотки управления в контуре компенсации, результирующей магнитодвижущей силы электромашинного усилителя и, в результате, напряжения якоря двигателя. Момент вращения двигателя возрастает, что позволяет преодолеть возросший момент нагрузки и сохранить неизменной заданную скорость вращения wим(t). Чувствительность контура компенсации к изменению момента нагрузки Мн определяется коэффициентом статического преобразования контура компенсации и настраивается потенциометром Rк.

Быстродействие и точность управления САУ скоростью вращения привода по возмущению (см. рис. 9) в условиях действия основного возмущения будет выше, чем в САУ по отклонению (см. рис. 7), т.к. инерционность контура компенсации определяется в основном быстродействием моментной муфты (передача и взаимодействие электрических сигналов не вносит существенного запаздывания). Кроме того, в САУ по возмущению формирование управляющего воздействия начнется по факту возникновения возмущения, раньше, чем оно значимым образом скажется на скорости вращения привода.
В САУ скоростью вращения привода по отклонению (см. рис. 7) в тех же условиях длительность переходного процесса САУ определяется инерционностью объекта управления (двигателя) и датчика выходной величины (тахогенератора), и, кроме того, формирование управляющего воздействия начинается по факту отклонения скорости от заданного значения, поэтому во время более длительного переходного процесса отклонение скорости вращения от заданного значения будут больше, чем в САУ по возмущению.
Однако в условиях действия прочих возмущений, например, при изменении коэффициента усиления электромашинного усилителя, САУ по возмущению не обеспечивает достижение цели управления: скорость вращения отклонится от заданной. В тех же условиях САУ по отклонению достижение цели управления обеспечит: благодаря контролю управляемой величины и величины рассогласования последствие влияния изменившегося коэффициента усиления электромашинного усилителя будет ликвидировано изменением напряжения, подаваемого на обмотку управления [10].
| ПРИМЕРЫ других систем управления по возмущению. |
|
2.1.4. Комбинированное управление
Улучшение качества управления в условиях действия различных возмущений может быть достигнуто с использованием комбинированного управления, объединяющим достоинства управления по отклонению и по возмущению. Структурная схема САУ с комбинированным управлением приведена на рис. 10.
В системах комбинированного управления на вход управляющих устройств, помимо рассогласования, вычисляемого по задающему воздействию и сигналу обратной связи, поступает сигнал, получаемый путем измерения возмущающих воздействий. Обычно в комбинированных схемах измеряется, и, соответственно, компенсируется, только основное возмущение. Последствие влияния остальных возмущений, для которых не предусмотрены контура компенсации, ликвидируется по обратной связи [1, 3, 10].
| Рис. 10 |
Рассмотрим реализацию комбинированной САУ скоростью вращения привода исполнительного механизма (ИМ) технологической системы. Такую систему, с контуром компенсации основного возмущения – изменения нагрузки на валу двигателя, и общей обратной связью можно реализовать объединением схем САУ по отклонению и по возмущению, показанных на рис. 7 и рис. 9. Рассмотрим альтернативный вариант реализации – с использованием компенсационной обмотки, включенной последовательно в цепь якоря двигателя (рис. 11).
В случаях, когда невозможно применить моментную муфту, измеряют не момент нагрузки Мн, а ток якоря Iя(t), который связан с Мн зависимостью, которую с некоторым приближением можно считать линейной. Контур компенсации возмущения в этом случае реализуется с использованием компенсационной обмотки электромашинного усилителя, включенной в цепь якоря. При увеличении момента нагрузки Мн ток якоря увеличивается, что приводит к возрастанию общей магнитодвижущей силы электромашинного усилителя и, в результате, его выходного напряжения. Момент вращения двигателя возрастает, компенсируя возросший момент нагрузки и обеспечивая независимость скорости вращения wим(t) от Мн.
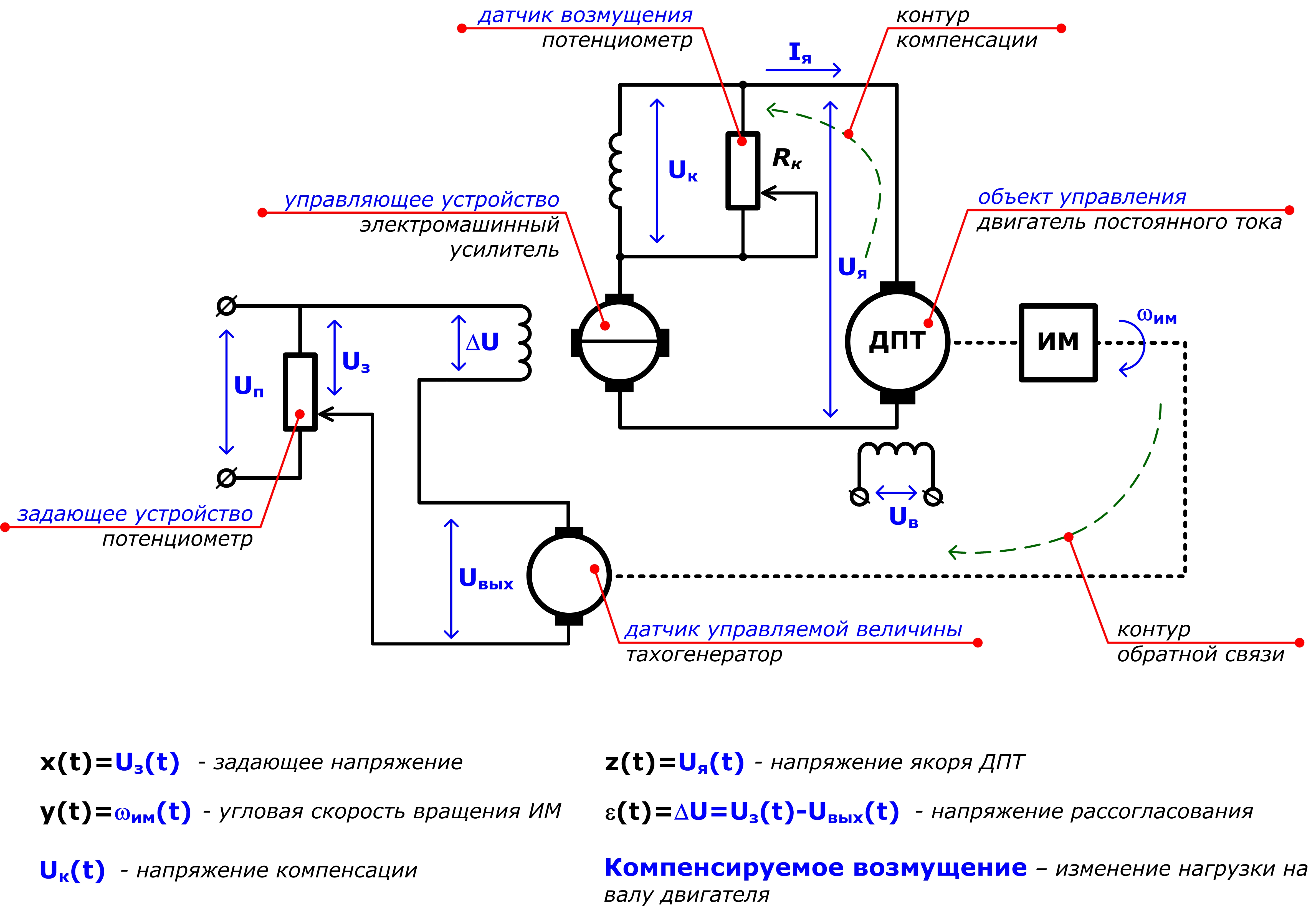
Чувствительность контура компенсации к изменению момента нагрузки Мн настраивается потенциометром контура компенсации Rк (см. рис. 11). Контур общей обратной связи, реализованный с использованием датчика управляемой величины – тахогенератора, работает так же, как в САУ по отклонению [10].
| ПРИМЕРЫ других систем комбинированного управления. |
|
Дата добавления: 2018-05-12; просмотров: 1078; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!