РОЗРОБЛЕННЯ ЕЛЕКТРОПРИВОДА ПІДЙОМНОГО МЕХАНІЗМУ
ВСТУП
Електричний привод є основним споживачем електричної енергії у всіх галузях народного господарства. Розвиток електропривода на сучасному етапі має ряд особливостей, які полягають в розширенні області застосування регульованого електропривода, в інтенсивному підвищенні технологічних вимог до електропривода, у розширенні та ускладненні його функцій, ускладненні систем керування, створенні уніфікованих комплектних електроприводів шляхом використання сучасної мікроелектроніки та комп’ютерної техніки. Аналіз світового досвіду створення нового і модернізації діючого технологічного устаткування показує високу динаміку розвитку регульованих електроприводів, комп’ютерних засобів автоматизації, використання інформаційних засобів. Вона зумовлена прагненням до максимального підвищення продуктивності технологічного обладнання та якості виробленої продукції. Всі провідні електротехнічні корпорації випускають регульовані електроприводи комплектно з комп’ютерними засобами автоматизації у вигляді гнучко програмованих систем, призначених для широкого використання. Крім застосування спільно з технологічними пристроями регульовані електроприводи використовуються в якості засобів регулювання технологічних змінних – рівня, тиску, вологості, температури, дозування, продуктивності.
У цих умовах фахівці з електротехніки та електротехнологій, інженери–електрики повинні знати сучасне обладнання, вміти проводити аналіз технологічних особливостей виробничих механізмів, здійснювати вибір та налаштування електроприводів.
Метою курсової роботи є систематизація і закріплення знань з типового електропривода, освоєння поширення методів розрахунку та вибору силового обладнання, апаратури керування, аналіз статичних, динамічних та енергетичних показників електропривода.
ЗМІСТ КУРСОВОЇ РОБОТИ
Список скорочень.
Вступ.
1. Принципи побудови систем керування електроприводами маніпуляторів. Вимоги до систем керування рухом маніпуляторів
2. РОЗРОБЛЕННЯ ЕЛЕКТРОПРИВОДА ПІДЙОМНОГО МЕХАНІЗМУ.
2.1. Характеристика механізму мостового крана.
2.2. Вимоги до електроприводамостового крана.
2.3. Пристрої керування електроприводами кранів.
2.4. Попередній вибір електродвигуна.
2.5. Побудова навантажувальної діаграми.
2.6. Перевірка електродвигуна.
2.7. Розрахунок пускових опорів.
2.8. Побудова механічних характеристик.
3. ДОСЛІДЖЕННЯ ЕЛЕКТРОПРИВОДА УСТАНОВКИ З НАСОСНОЮ ХАРАКТЕРИСТИКОЮ.
3.1. Особливості електроприводів насосів та вентиляторів.
3.2. Дослідження математичної моделі автоматичного керування насосною установкою.
4. ПРОЕКТУВАННЯ ЧАСТОТНОГО ЕЛЕКТРОПРИВОДА.
4.1. Побудова та дослідження математичної моделі при відпрацюванні заданої траєкторії руху.
4.2. Перевірка електродвигуна.
4.3. Вибір обладнання силового кола.
4.4. Налаштування конфігурації перетворювача частоти.
4.5. Розроблення схеми керування електроприводом.
4.6. Програмування технологічного контролера.
Висновки.
Додатки. Перелік використаних джерел.
Принципи побудови систем керування електроприводами маніпуляторів. Вимоги до систем керування рухом маніпуляторів
Системи керування електроприводами маніпулятора забезпечують рух виконавчого органу по заданій просторовій траєкторії шляхом керування рухами окремих ланок маніпулятора. Кожна ланка оснащується електроприводом і датчиками для контролю переміщень. Завдання на рух ланок здійснюється від пристрою програмного керування. На рис. 1 зображена функціональна схема системи керування рухом ланок триланкового маніпулятора, в якому виділені тільки переносні координати. Вплив, що керує q13, q23, q33 надходить до блоків керування БУ1 ... БУ3 электроприводами М1 ... М3.
Передавальні механізми ПМ1 ... ПМЗ забезпечують реалізацію необхідного виду руху (лінійного чи кутового) ланок. Цей рух визначається узагальненими координатами q1, q2, q3. Датчики положення ланок можна встановлювати на електродвигунах і ланках маніпулятора.
У маніпуляторі на нерухомій основі 1 встановлена колона 2, яка здійснює кутові переміщення φ1 навколо вертикальної осі, а ланки 3 та 4 здійснюють кутові переміщення φ2 і φ3 навколо осей, перпендикулярних площині малюнка.

Рисунок 1 – Функціональна схема системи керування рухом ланок триланкового маніпулятора
Програмування траєкторії руху схвату 5 з вантажем 6 виконується в нерухомій системі координат основи. Вектор узагальнених координат схвата як функція часу технологічного процесу qc(t) формується через вектор узагальнених координат ланок маніпулятора, який у жорсткій механічній системі є вектором узагальнених координат приводів qn(t). Вектори qc(t) і qn(t) пов'язані між собою відображенням перетворення координат T, зміст якого встановлюється з рішення прямої задачі кінематики маніпулятора. Пристрій програмного керування виробляє вектор, що задає узагальнені координати приводів qnз(t), який пов'язаний з вектором, що задає узагальнені координати схвата маніпулятора qсз(t) зворотнім відображенням перетворення координат T-1. Зміст T-1 встановлюється з рішення зворотньої задачі кінематики маніпулятора.
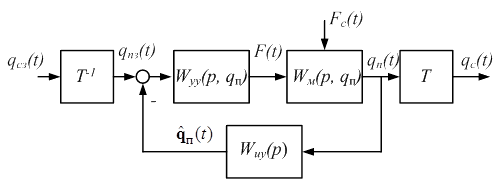
Рисунок 2 – Узагальнена матрична структурна схема системи керування
Пряма задача. Задана кінематична схема маніпулятора, і в певний момент часу відомі значення узагальнених координат, що визначають положення всіх ланок маніпулятора один щодо одного. Потрібно визначити положення і орієнтацію схвата в системі відліку, пов'язаного з основою.
Зворотня задача. Задана кінематична схема маніпулятора і відомі положення та орієнтація схвата в системі координат основи. Потрібно визначити значення узагальнених координат, які забезпечують задане положення схвату.
У загальному випадку динамічні властивості маніпулятора характеризуються матрицею Wм(p, qn) відповідно до якої виконується синтез матриці керуючих пристроїв Wуу(p, qn). В узагальненій матричній структурній схемі системи керування схватом маніпулятора F(t), Fc(t) – вектори сил, прикладених до ланок маніпулятора і опорів; qˆn(t) – вектор виміряних значень узагальнених координат приводів; Wuу(p, qn) – матриця інформаційних пристроїв. Крім головних зворотних зв'язків за узагальненими координатами приводів, в системі можуть бути зворотні зв'язки за проміжними координатам, виконані відповідно до принципів підпорядкованого керування.
Реалізуючи системи керування рухом маніпуляторів, прагнуть до того, щоб інерційні властивості приводів і ланок не вносили спотворення в задані траєкторії руху схвата. З цією метою застосовують електроприводи, що володіють великою смугою пропускання. Такими властивостями володіють сервопривода. Проте динамічні властивості маніпулятора як об'єкта керування не дозволяють це зробити однозначно, розглядаючи системи керування ланками маніпулятора як автономні системи. Через наявність коріолісових і центробіжних сил інерції для ряду схем маніпуляторів виникають динамічні взаємозв'язки ланок, що необхідно враховувати при проектуванні систем.
Керування електромеханічними системами значно відрізняється від звичайної обробки даних на комп'ютері. Тут обробка даних слідує за подіями в об'єкті керування. Цифрова система керування повинна досить швидко реагувати на зовнішні події і постійно обробляти потік вхідних даних, найчастіше не маючи можливості змінити швидкість їх надходження. Одночасно система повинна забезпечувати і виконання інших, допоміжних функцій – обмін інформацією, обробка, збереження та архівування даних, їх виведення на екран, адекватна реакція на певні сигнали і т.д. Для такого режиму роботи обчислювальних пристроїв, який називають режимом реального часу, застосовують спеціальні методи програмування через особливості, властиві цьому режиму. До таких особливостей можна віднести і те, що система реального часу містить не одну, а кілька програм, кожна з яких відповідає за вирішення певного завдання, причому зв'язок між цими програмами може бути досить складним. Крім того, порядок виконання команд програми реального часу не може бути визначений заздалегідь, оскільки він залежить від зовнішніх подій і може бути змінений перериваннями. Тому й час, що витрачається на обчислення в кожному циклі роботи, може істотно змінюватись.
Стандарт POSIX IЕЕЕ 1003.1 дає таке визначення: "реальний час в операційних системах – це здатність операційної системи забезпечити необхідний рівень сервісу в певний проміжок часу". Отже, операційна система реального часу відрізняються своєю поведінкою, а не внутрішнім принципом побудови. Тому якщо імовірність появи неприпустимо великих затримок досить низька для досягнення необхідного рівня сервісу, то така операційна система в конкретному застосуванні може розглядатися як операційна система реального часу.
Тим не менш, існують певні методи побудови операційних систем, які забезпечують прямокутну щільність розподілу імовірності затримки і тому відносяться до операційних систем жорсткого реального часу незалежно від рівня сервісу. В операційних системах жорсткого реального часу процес представляється на виконання одночасно з зазначенням необхідного часу виконання. Планувальник операційної системи або дозволяє виконання, гарантуючи необхідний час, або відхиляє процес як неможливий для виконання. Для цього планувальник повинен точно знати, скільки часу потрібно кожної функції операційної системи для виконання завдання .
Базовими вимогами для забезпечення режиму реального часу є наступні:
- високопріоритетні завдання завжди повинні виконуватися в першу чергу;
- повинна бути виключена інверсія пріоритетів;
- процеси і потоки, час виконання яких не можна планувати, ніколи не повинні повністю займати ресурси системи.
Інверсією пріоритетів називають ситуацію, коли потік з високим пріоритетом вимагає надання ресурсу, який вже зайнятий потоком з більш низьким пріоритетом. Виходить, що високопріоритетний потік стоїть у черзі, в той час коли виконується низькопріоритетний (відбувається "інверсія пріоритетів"). Така ситуація можлива, якщо є потік із середнім пріоритетом, який блокує завершення виконання потоку з нижчим пріоритетом, а потік з вищим пріоритетом не може початися, оскільки захоплений необхідний йому ресурс. Основним методом вирішення цієї проблеми в операційній системі реального часу є успадкування пріоритетів, яке полягає в наступному. Якщо низькопріоритетний потік блокує виконання декількох високопріоритетних потоків, то низькопріоритетний потік ігнорує призначений йому спочатку пріоритет і виконується з пріоритетом, який є найвищим в блоці очікуючих його потоків. Після закінчення роботи потік приймає свій первісний пріоритет.
Для забезпечення режиму реального часу в операційних системах можуть бути реалізовані наступні вимоги :
- підтримка динамічних пріоритетів (які можна змінювати в процесі виконання завдання) в багатозадачному режимі з витісняючим ядром (як для процесів, так і для потоків);
- можливість успадкування пріоритетів;
- можливість витіснення завдань ядром операційної системи;
- обмежена латентність переривань (час, протягом якого переривання заборонено, – це час обробки критичної секції коду);
- виконання сервісів операційної системи з пріоритетом, який призначається клієнтом сервісу.
Найбільш поширеними в програмованих логічних контролерах і комп'ютерах для вирішення завдань автоматизації є операційні системи Windows CE, QNX и ОS-9.
РОЗРОБЛЕННЯ ЕЛЕКТРОПРИВОДА ПІДЙОМНОГО МЕХАНІЗМУ
Дата добавления: 2018-02-15; просмотров: 854; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!