Дослідження математичної моделі системи автоматичного керування насосною установкою
Проведемо дослідження математичної моделі системи автоматичного керування насосним агрегатом.
Дані електродвигуна АИР 200 М2: Р2ном = 37кВт; n2ном = 2940 об/хв; kм = 2,8; Jд = 0,13 кг×м2. I=70,6 А
Дані відцентрового насоса: НN = 69,8м; Но = 99,6м.
Дослідження перехідних процесів проведемо на основі математичної моделі системи автоматичного керування насосним агрегатом (рис. 6). Схема передбачає підтримання сталого значення напору при зміні продуктивності установки. Спад напору при зростанні продуктивності відбувається синхронно із зміною навантаження на валу двигуна.
Структурна схема електропривода складається із чотирьох складових: структурних схем задавача моменту навантаження, задавача траєкторії руху, структурної схеми ПІ–регулятора та структурної схеми асинхронного електродвигуна.
Структурна схема асинхронного двигуна побудована відповідно до рівняння жорсткості механічної характеристики та рівняння рівноваги моментів. Для реалізації основних залежностей використані аперіодична ланка першого порядку, інтегрувальні та без інерційні ланки.

Рис. 6. Структурна схема системи автоматичного керування насосним агрегатом
Алгоритм ПІ–регулятора реалізується при допомозі передаточної функції:
 ,
,
де kp– коефіцієнт передачі регулятора; Тр– стала часу регулятора.

Рис. 7. Структурна схема ПІ–регулятора

Рис. 8. Структурна схема електродвигуна
|
|
|
Число пар обмотки статора для АИР 160 S2: рn = 1.
Частота обертання магнітного поля статора в об/хв :
n1 = 
Номінальне ковзання:

Номінальна частота обертання ротора в рад/с:

При безпосередньому з’єднанні вала двигуна і вала насоса:
wN = w2ном.
Номінальний момент асинхронного електродвигуна:
Мном =  (8)
(8)
Максимальний момент двигуна:
Мmax = kм×Мном = 2,8×120,24 = 336,67Нм.
Критичне ковзання:

Частота обертання магнітного поля статора в рад/с:

Коефіцієнт жорсткості механічної характеристики на ділянці О – Мmax:
b = 
Електромагнітна стала часу електродвигуна:

Частота перетворювача, при якій забезпечується нульова продуктивність та номінальний напір:

Коефіцієнт зворотного зв’язку за напором:

При незмінній жорсткості механічної характеристики електродвигуна:

Коефіцієнт пропорційності:

Коефіцієнт зміни напору:

Стала часу ПІ–регулятора:
Тр = (1...2) Те.
Приймемо: Тр = 0,06с.
Коефіцієнт передачі ПІ–регулятора: кр = 1.
Момент навантаження при t = 3c:
М  = 0,5 ×Мном = 0,5 ×120,24 = 60,12 Н × м.
= 0,5 ×Мном = 0,5 ×120,24 = 60,12 Н × м.
Момент навантаження при t = 7c:
М  = 1,2 ×Мном = 1,2×120,24 = 144,29 Н × м.
= 1,2 ×Мном = 1,2×120,24 = 144,29 Н × м.
Різниця моментів при t = 3c та t = 7c:
DМ = М – М = 144,29 – 60,12 = 84,17 Н × м.
Сумарний момент інерції приймемо рівним моменту інерції ротора:
|
|
|
 J = Jд = 0,13кг × м2.
J = Jд = 0,13кг × м2.
ω2, рад/с
ω2пі, рад/с
Рис. 9. Графіки перехідних процесів при використанні ПІ-регулятора та без нього при пуску електродвигуна
ω2, рад/с
М, Нм
Рис. 10. Графіки перехідних процесів системи без ПІ-регулятора

ω2, рад/с
М, Нм
f1, Гц
f-0.16ω2, Гц
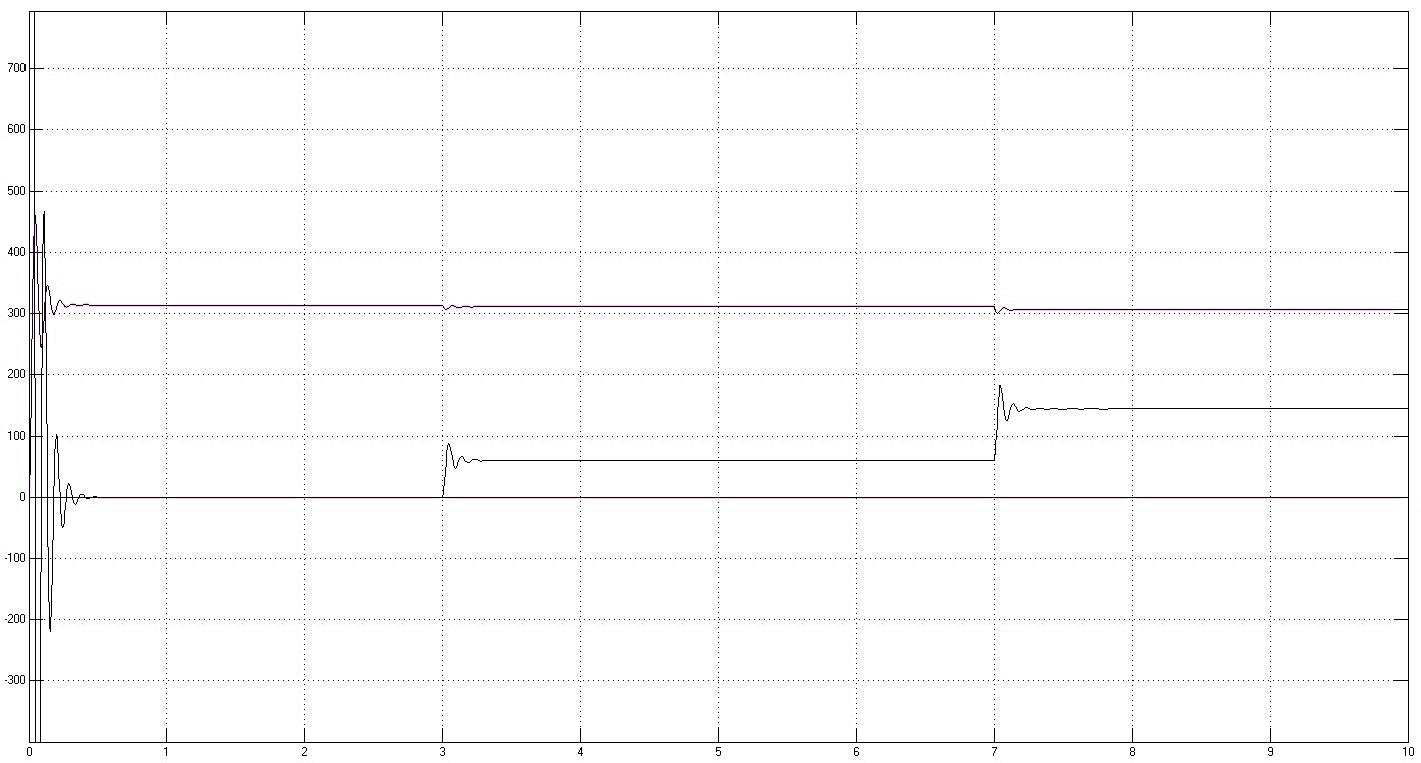
Рис. 11. Графіки перехідних процесів системи з ПІ-регулятором
Підтримання сталого напору в системі при зміні водоспоживання відбувається за рахунок регулювання швидкості двигуна. П1–регулятор забезпечує необхідний сигнал завдання на вході системи для компенсації зміни напору в процесі водоспоживання.
|
|
|
На початку роботи здійснюється пуск двигуна до швидкості 265 рад/с. Зростання навантаження відбулося в момент часу 3с до значення 8 Нм. При досягненні моменту часу 7с навантаження зросло ще на 13 Нм внаслідок збільшення водоспоживання. Швидкість при цьому зросла з 306,4 рад/с до 332 рад/с для компенсації спаду напору в системі. Зменшення водоспоживання призведе до сповільнення швидкості двигуна.
При відсутності ПІ–регулятора зростання витрат води буде супроводжуватись зменшення опору та спаданням швидкості двигуна через нахил механічної характеристики.
Дата добавления: 2018-02-15; просмотров: 932; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!