КОНТАКТНЫЕ НАПРЯЖЕНИЯ В РАБОЧИХ ОРГАНАХ
Возникновение контактных напряжений в рабочих органах ВЗД обусловлено двумя факторами. Во-первых, для создания уплотнения рабочих камер в паре ротор - статор создается предварительный натяг, назначаемый в зависимости от межвит-кового перепада давления и физико-механических свойств эластичной обкладки статора. Во-вторых, при движении ротора к нагрузке от предварительного натяга добавляется нагрузка от радиальных сил (см. § 5.5), действующих в РО. Суммарная нагрузка в точке касания неодинакова на различных участках профилей и зависит от направления вектора равнодействующей радиальных сил.
Расчет удельных* нормальных нагрузок N относится к классу пространственных контактных статически неопределимых задач напряженного состояния прижатых упругих тел. В данном случае одно из тел (ротор) может рассматриваться как абсолютно твердое, но при этом кривизна соприкасаемых тел изменяется по длине контактных линий. Определение N является одной из наиболее сложных задач в теории одновинтовых гидромашин и требует проведения экспериментальных исследований.
Для инженерных расчетов можно принять следующие допущения:
1. Нагрузка от натяга  равномерно распределена по всей длине контактных линий и пропорциональна относительному натягу
равномерно распределена по всей длине контактных линий и пропорциональна относительному натягу  :
:
 (5.89)
(5.89)
где k0 - коэффициент, зависящий от геометрических параметров и определяемый из анализа стендовых характеристик ВЗД.
|
|
|
2. В результате действия перекашивающего момента нагрузка от радиальных сил в верхней и нижней частях пары различна и рассматривается отдельно на половине длины РО (см. §5.2).
3. Нагрузка от радиальных сил  воспринимается только частью контактной линии, называемой уплотнительной линией:
воспринимается только частью контактной линии, называемой уплотнительной линией:
 (5.90)
(5.90)
где  - удельная нагрузка на уплотнительной линии; к - угол давления (угол между положительным направлением нормали к
- удельная нагрузка на уплотнительной линии; к - угол давления (угол между положительным направлением нормали к
профилю и вектором равнодействующей радиальных сил  ) (см. § 5.5).
) (см. § 5.5).
4. Удельная нагрузка от радиальных сил (без учета натяга) постоянна и зависит от протяженности уплотнительной линии Ly на половине длины РО:
 (5.91)
(5.91)
Точный расчет Ly возможен только с использованием компьютера. При ориентировочных расчетах можно принять, что радиальная нагрузка распределяется на половине длины контактных линий (Ly = L/4).
С учетом принятых допущений удельная нормальная нагрузка в точке касания РО
|
|
|
 (5.92)
(5.92)
Для приближения к реальным условиям контакта РО в расчетную зависимость вводится коэффициент неравномерности распределения нагрузки по длине контактных линий  .
.
Тогда выражение (5.92) принимает вид
Контактное напряжение при взаимодействии РО определяется по формуле Герца
 (5.93)
(5.93)
где Епр - приведенный модуль упругости материалов РО;  -коэффициент Пуассона.
-коэффициент Пуассона.
Для пары сталь - резина (  8 МПа; Е2 = 2
8 МПа; Е2 = 2  105 МПа)
105 МПа)  .
.
Максимальные контактные напряжения возникают при зацеплении выступов зубьев ротора и статора. Такой вывод подтверждается экспериментальными исследованиями контактных напряжений с использованием методов фотоупругости, проведенными отечественными и зарубежными исследователями [108, 159].
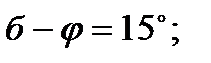
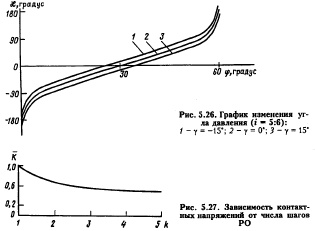
При движении ротора векторы гидравлических и инерционных сил поворачиваются в противоположную сторону с z2-раза большей скоростью (рис. 5.25). Динамика РО определяет характер нагружения профилей ротора и статора. В течение цикла взаимодействия выступа зуба ротора со статором угол давления изменяется по закону (рис. 5.26)
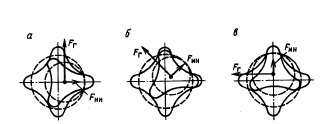
Рис. 5.25. Изменение положения радиальных сил при повороте ротора (i=3:4): 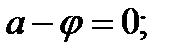
|
|
|
 (5-94)
(5-94)
Поэтому контактные напряжения на выступе зуба ротора возникают на второй половине цикла взаимодействия, когда угол давления к достигает нулевого значения (см. рис. 5.26). При этом характер нагружения профилей - циклический с частотами: на выступе ротора -  ; на профиле статора - z2n.
; на профиле статора - z2n.
Таким образом, при взаимодействии ротора и статора наблюдается односторонний фрикционный износ их поверхностей (на левой стороне зубьев ротора, если смотреть со входа в РО).
Указанные особенности нагружения профилей должны учитываться при проведении мероприятий (конструктивных, технологических, эксплуатационных), направленных на повышение износостойкости РО.
Функциональную зависимость контактного напряжения в общем случае можно представить в вид
 (5.95)
(5.95)
Из (5.95) следует, что в "герцевой" постановке задачи при заданном Р уровень контактных напряжений не зависит от диаметра РО и определяется сочетанием безразмерных параметров ВГМ. При заданном рабочем объеме снизить контактные напряжения за счет  не представляется возможным, поскольку
не представляется возможным, поскольку
Р обусловлен необходимым крутящим моментом, а  для используемого при изготовлении статора сортамента эластичных материалов изменяется незначительно.
для используемого при изготовлении статора сортамента эластичных материалов изменяется незначительно.
|
|
|
В связи с этим на первый план выдвигается задача оптимизации геометрических параметров РО.
Увеличение числа шагов РО приводит к снижению контактных напряжений (рис. 5.27), поэтому использование многошаговых конструкций - один из наиболее эффективных способов повышения износостойкости РО [51, 87].
Анализ влияния безразмерных параметров зацепления на уровень контактных напряжений проводится при оптимизации геометрии РО (см. § 7.2).
БАЛАНС МОЩНОСТИ
Подводимая к гидродвигателю потоком жидкости гидравлическая мощность  вследствие потерь в машине превышает полезную мощность на валу N = М
вследствие потерь в машине превышает полезную мощность на валу N = М  .
.
В процессе работы объемной гидромашины различают три вида потерь мощности [60, 111]:
1) механические потери NM на трение в РО, шарнирном соединении (гибком вале) и опорах шпинделя;
2) объемные потери N0, обусловленные утечками жидкости в РО;
3) гидравлические потери Nr при течении жидкости в каналах РО и других проточных элементах гидродвигателя.
Баланс мощности ВЗД (рис. 5.28, а) выражается уравнением
 (5.96)
(5.96)
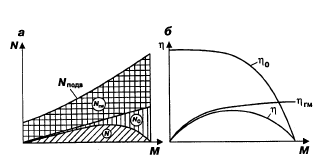
Рис.5.28.Баланс мощности (а) и к.п.д. (б) гидродвигателя
Мощностью сжатия Nсж потока из-за ее малости можно пренебречь.
Базовыми (внешними) переменными гидродвигателя, которые можно непосредственно измерить в процессе его эксплуатации или стендовых испытаний, являются  (механические переменные') и Р,Q(гидравлические переменные).
(механические переменные') и Р,Q(гидравлические переменные).
Для анализа уравнения баланса рассмотрим индикаторные" (внутренние) величины: крутящий момент Минд, угловую скорость  инд, давление Ринди расход Оиндгидромашины, которые непосредственно воздействуют на ротор (винт) и определяют рабочий процесс ВЗД:
инд, давление Ринди расход Оиндгидромашины, которые непосредственно воздействуют на ротор (винт) и определяют рабочий процесс ВЗД:
 (5.97)
(5.97)
Индикаторные значения (за исключением ) отличаются от базовых переменных соответственно на величину механических  ,гидравлических РГ и объемных
,гидравлических РГ и объемных  потерь.
потерь.
В объемных гидромашинах механические и гидравлические индикаторные переменные связаны пропорциональными зависимостями [60]:
 (5.98)
(5.98)
 (5.99)
(5.99)
Следовательно, индикаторная мощность ВЗД - мощность, развиваемая ротором под воздействием жидкости:
 (5.100)
(5.100)
Если в (5.98)—(5.100) подставить выражения индикаторных величин из (5.97), то получим уравнения связи механических и гидравлических переменных гидромашины:
в силовой форме
 (5.101)
(5.101)
в кинематической форме
 (5.102)
(5.102)
в энергетической форме
 (5.103)
(5.103)
Из энергетической формы уравнения связи можно получить выражения потерь мощности
 (5.104)
(5.104)
а также выражение индикаторной мощности
 (5.105)
(5.105)
Разделив обе части уравнения баланса мощности (5.96) на  и произведя несложные преобразования, можно перейти к уравнению баланса моментов
и произведя несложные преобразования, можно перейти к уравнению баланса моментов
МИ = М + ММ + МГ = МИНД + МГ (5.106)
где МИ - идеальный крутящий момент, который мог бы развить двигатель при отсутствии механических и гидравлических потерь; МГ - "момент гидравлических потерь" - составляющая потерь идеального момента, расходуемая на гидравлические потери:  .
.
Следствием уравнения баланса моментов является уравнение баланса давлений
 (5.107)
(5.107)
где  - полезная составляющая перепада давления, создающая крутящий момент; Рм - составляющая перепада давления, идущая на покрытие механических потерь:
- полезная составляющая перепада давления, создающая крутящий момент; Рм - составляющая перепада давления, идущая на покрытие механических потерь:
 .
.
В отличие от уравнения баланса мощности (5.96) в выражения баланса моментов и давлений не входят составляющие объемных потерь, что делает эти уравнения более удобными для расчетов характеристик ВЗД (см. гл. 6).
Качественным показателем баланса мощности гидромашины является его к.п.д.(рис. 5.28, б)
 (5.108)
(5.108)
Коэффициент полезного действия гидродвигателя можно представить как произведение его частных к.п.д.
 (5.109)
(5.109)
где  механический к.п.д.,
механический к.п.д.,
 (5.110)
(5.110)
 - гидравлический к.п.д.,
- гидравлический к.п.д.,
 (5.111)
(5.111)
 объемный к.п.д.,
объемный к.п.д.,
 (5.112)
(5.112)
 - идеальная угловая скорость,
- идеальная угловая скорость,  Q/V.
Q/V.
Произведение объемного и гидравлического к.п.д. выражает индикаторный (объемно-гидравлический) к.п.д. гидродвигателя, характеризующий влияние всех потерь гидравлического происхождения,
 (5.113)
(5.113)
Поскольку при исследовании характеристик винтового гидродвигателя не представляется возможным разделить гидравлические и механические потери, для их оценки в теории ВЗД используется гидромеханический к.п.д. (см. рис. 5.28, б)
 (5.114)
(5.114)
Все частные к.п.д. гидродвигателя и их комбинации 
зависят от режима работы ВЗД (крутящего момента).
Дата добавления: 2018-02-18; просмотров: 572; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!