Геометрические параметры рабочих органов ВЗД
| Параметр | Двигатель | ||||
| Дt-54 | Д1-88 | Д1-127 | Д2-195 | Д1-240 | |
| DK, мм е, мм i Т, мм S, см2 SК, см2 Lr, см V, л | 36 2,14 5:6 222 2,0 6,9 21,6 0,22 | 63 3,5 5:6 390 5,8 21,6 37,4 1,14 | 92 3,5 9:10 650 9,0 52,2 60,1 5,26 | 135 4,9 9:10 850 18,6 113,7 87,2 14,3 | 175 7,0 7:8 880 34,4 186,3 107,3 21,2 |
Глава 5
РАБОЧИЙ ПРОЦЕСС ВЗД
Рабочим процессом гидравлической машины принято считать совокупность физических явлений, возникающих при рабочем цикле. Рабочий процесс ВЗД обусловливается взаимодействием РО в их относительном движении.
КИНЕМАТИКА РАБОЧИХ ОРГАНОВ
Кинематику ВЗД следует рассматривать с двух точек зрения: как кинематику ВГМ в целом, что позволяет определить кратность действия механизма и соотношение между его относительными, переносными и абсолютными скоростями и ускорениями;
как кинематику контактных точек, что дает возможность исследовать скорости качения и скольжения профилей, определяющие процесс изнашивания РО.
Кинематика ВГМ.В каждом поперечном сечении ВГМ может быть представлен в виде двух начальных окружностей (центроид), одна из которых обкатывается внутри другой без скольжения с постоянной угловой скоростью. Исследуем с этих позиций кинематику героторных механизмов различного конструктивного исполнения* (см. табл. 1.1):
с неподвижным наружным элементом (НЭ) и планетарно движущимся внутренним элементом (ВЭ) - традиционная схема;
|
|
|
с вращающимся ВЭ и планетарно движущимся НЭ;
с вращающимся НЭ и планетарно движущимся ВЭ.
Механизм с неподвижным НЭ. Ротор и его центроида b совершают планетарное движение, обкатываясь соответственно по зубьям статора и неподвижной центроиде а (см. рис. 4.10).
Обозначим оси подвижной системы координат, связанной с ротором  Пусть в начальном положении (рис. 5.1, а) точ-
Пусть в начальном положении (рис. 5.1, а) точ-
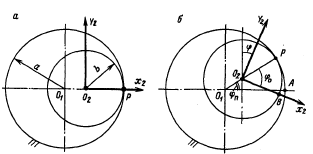
Рис. 5.1. Кинематика героторного механизма с неподвижным НЭ:
а - начальное положение; б - при повороте на угол 
ка касания центроид (полюс зацепления Р) расположен на оси х. При повороте ротора и осей на угол  по часовой стрелке в абсолютном движении (относительно неподвижной системы координат) полюс изменяет свое положение, а ось ротора поворачивается против часовой стрелки (переносное движение) на угол
по часовой стрелке в абсолютном движении (относительно неподвижной системы координат) полюс изменяет свое положение, а ось ротора поворачивается против часовой стрелки (переносное движение) на угол  (рис. 5.1, б).
(рис. 5.1, б).
Подвижная система координат х2у2 совершает относительное движение (поворот на угол 0 по часовой стрелке) по отношению к условному водилу  .
.
Слитная точка Р (см. рис. 5.1, а) при повороте ротора переходит в положения А и В (см. рис. 5.1, б). Так как обкатка центроид происходит без скольжения, то РА = РВ. Поскольку  то
то
 (5.1)
(5.1)
|
|
|
Абсолютное угловое перемещение ротора
 (5.2)
(5.2)
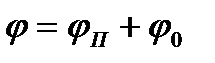
Для ВЗД  , поэтому с учетом (5.1)
, поэтому с учетом (5.1)
 (5.3)
(5.3)
т.е. за один оборот ротора его ось совершает z2 оборотов в противоположном направлении.
Цикл ВГМ с закрепленным НЭ (рис. 5.2), соответствующий процессу вытеснения объема жидкости, равного объему рабочих
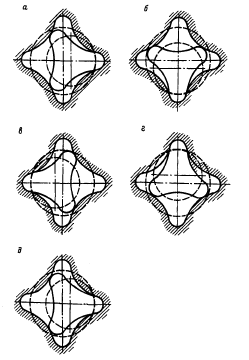
Рис.5.2. Цикл гидромашины(i=3:4) c неподвижным НЭ:
 ;
;  ;
;  ;
; 
камер гидромашины, происходит при повороте ротора на угол 2  /z2. Следовательно, кратность действия ВГМ
/z2. Следовательно, кратность действия ВГМ
 . (5.4)
. (5.4)
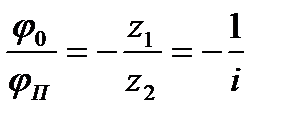
Механизм с неподвижным ВЭ. НЭ и его центроида а совершают планетарное движение, обкатываясь по зубьям ВЭ и его центроиде b . В данном случае подвижными являются оси координат  , связанные с НЭ. При повороте НЭ и осей х1у1 на
, связанные с НЭ. При повороте НЭ и осей х1у1 на
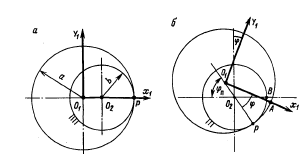
Рис. 5.3. Кинематика героторного механизма с неподвижным ВЭ:
а - начальное положение; б - при повороте на угол 
|
|
|
угол  по часовой стрелке ось НЭ поворачивается в том же направлении (переносное движение) на угол п (рис. 5.3). Подвижная система координат х1у1 совершает относительное движение против часовой стрелки ( 0) по отношению к условному водилу
по часовой стрелке ось НЭ поворачивается в том же направлении (переносное движение) на угол п (рис. 5.3). Подвижная система координат х1у1 совершает относительное движение против часовой стрелки ( 0) по отношению к условному водилу  .
.
Так же, как и в предыдущем случае, РА = РВ, при этом 
 п
п 
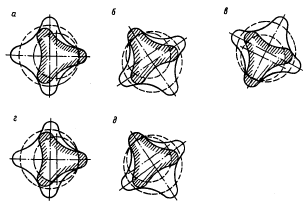


Рис. 5.4. Цикл гидромашины (i = 3:4) с неподвижным ВЭ:
 ; в -
; в -  = 60
= 60  ; г -
; г -  = 90°; д - = 120
= 90°; д - = 120 
Следовательно
Поэтому в схеме с закрепленным ВЭ за один оборот НЭ его ось совершает  оборотов в том же направлении. При этом (рис. 5.4) каждая камера
оборотов в том же направлении. При этом (рис. 5.4) каждая камера  раза циклически изменяет объем (
раза циклически изменяет объем ( 
Таким образом, в механизмах, один элемент которых неподвижно закреплен, а второй совершает планетарное движение, угловые скорости относительного и переносного движений пропорциональны кинематическому отношению РО.
Угловая скорость подвижного элемента в абсолютном движении пропорциональна частоте вращения п выходного вала:
 (5.7)
(5.7)
Относительная угловая скорость
 (5.8)
(5.8)
Переносная угловая скорость
 (5.9)
(5.9)
|
|
|
где z- число зубьев подвижного элемента.
Верхние знаки в формулах (5.8), (5.9) относятся к механизму с неподвижным НЭ, нижние - с неподвижным ВЭ.
Если рассматривать подвижной элемент, совершающий планетарное движение, как материальную точку, находящуюся в центре подвижной системы координат (см. рис. 5.1, т. 02 и рис. 5.3, т. О  ]), то его абсолютное ускорение равно переносному ускорению.
]), то его абсолютное ускорение равно переносному ускорению.
Так как центр подвижного элемента вращается по круговой орбите радиуса е с угловой скоростью  п, то переносное ускорение, направленное к центру,
п, то переносное ускорение, направленное к центру,
 (5.10)
(5.10)
Механизм с вращающимся НЭ. НЭ и его центроида вращаются в подшипниках вокруг своей неподвижной оси  . При этом ВЭ, соединенный шарниром или гибким валом с неподвижной колонной бурильных труб, совершает планетарное движение, обкатываясь по зубьям НЭ.
. При этом ВЭ, соединенный шарниром или гибким валом с неподвижной колонной бурильных труб, совершает планетарное движение, обкатываясь по зубьям НЭ.
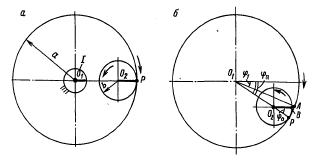
Рис. 5.5. Кинематика героторного механизма с вращающимся НЭ:
а - начальное положение;б - при повороте на угол  ; I- конец гибкого вала
; I- конец гибкого вала
Поскольку конец гибкого вала, соединенный с трубами, закреплен, при движении рабочих органов все линии (волокна) в поперечных сечениях гибкого вала и центроиды ВЭ остаются параллельными. Например, выделенный отрезок 02 Р (рис. 5.5, а) центроиды во всех фазах параллелен оси х (рис. 5.5, б, 02В), т.е. абсолютное угловое перемещение  = 0.
= 0.
Для соблюдения этого условия при обкатке центроид (см. рис. 5.5, б) ось 02 ВЭ совершает переносное движение (п) вокруг оси  НЭ, а относительный угол поворота ВЭ
НЭ, а относительный угол поворота ВЭ
 (5.11)
(5.11)
Поскольку обкатка центроид происходит без скольжения (см. рис. 5.5, б), РА = РВ. В свою очередь, РА =  ,
,  .
.
При  (5.12)
(5.12)

Следовательно, в ВГМ с вращающимся НЭ так же, как и в механизме с неподвижным ВЭ, за один оборот НЭ ось ВЭ совершает  оборот в том же направлении, а рабочий цикл соответствует углу поворота
оборот в том же направлении, а рабочий цикл соответствует углу поворота 
Таким образом, независимо от конструктивной схемы ВЗД кратность действия ВГМ, определяющая число циклов за оборот выходного вала, равна числу зубьев ВЭ (j= z2). Следовательно, для всех случаев рабочий объем гидромашины определяется выражением (4.97).
Кинематика контактных точек.Общий анализ кинематики контактных точек производится на основе уравнения связи угловых параметров точек касания профилей РО и угла поворота  ротора (4.24).
ротора (4.24).
Наличие двух корней  уравнения связи означает, что в каждый момент времени зацепление профилей происходит одновременно на впадинах и выступах ротора.
уравнения связи означает, что в каждый момент времени зацепление профилей происходит одновременно на впадинах и выступах ротора.
Для идеального ВГМ можно определить угловые параметры двух особых точек зацепления, в которых:
нормаль касается центроид профилей (удовлетворяющие условию  ) [94]:
) [94]:
 (5.13)
(5.13)
нормаль проходит через полюс зацепления в исходном положении профилей (удовлетворяющие условию  ). В общем случае имеются три такие точки, которые можно найти из выражений:
). В общем случае имеются три такие точки, которые можно найти из выражений:
 ; (5.14)
; (5.14)
Во внецентроидном (с0 = 1) зацеплении  . Угловые координаты особых точек
. Угловые координаты особых точек  определяют общие закономерности кинематики контактных точек [56].
определяют общие закономерности кинематики контактных точек [56].
Циклы взаимодействия выступов и впадин ротора со статором с учетом кратности действия ВГМ согласованы между собой. Цикл взаимодействия впадины ротора со статором начинается и заканчивается не в "мертвых" точках (рис. 5.6,а), а совершается на интервале угла поворота ротора  . При этом на участках
. При этом на участках  в зацеплении находятся сразу две соседние впадины, а точки контакта выступа и завершающей свой цикл впадины ротора движутся навстречу друг другу. При повороте ротора на угол
в зацеплении находятся сразу две соседние впадины, а точки контакта выступа и завершающей свой цикл впадины ротора движутся навстречу друг другу. При повороте ротора на угол  (рис. 5.6, б) эти контактные точки сливаются (общая нормаль касается обеих центроид профилей) и в зацеплении остается одна впадина, т.е. во внецентроидном зацеплении при вращении ротора циклы впадин перекрываются и суммарное число точек контакта профилей периодически изменяется от
(рис. 5.6, б) эти контактные точки сливаются (общая нормаль касается обеих центроид профилей) и в зацеплении остается одна впадина, т.е. во внецентроидном зацеплении при вращении ротора циклы впадин перекрываются и суммарное число точек контакта профилей периодически изменяется от  до
до  (одновременно в контакте с профилем статора находятся z2выступа и как минимум одна впадина ротора).
(одновременно в контакте с профилем статора находятся z2выступа и как минимум одна впадина ротора).
Участки профиля статора с угловыми параметрами в интервалах  в контакт со впадиной ротора не вступают.
в контакт со впадиной ротора не вступают.
По аналогии с поршневыми гидромашинами угол  можно назвать углом запаздывания цикла впадины относительно "мертвых" точек. Исключением является ВГМ с однозаходным ротором
можно назвать углом запаздывания цикла впадины относительно "мертвых" точек. Исключением является ВГМ с однозаходным ротором  , в котором
, в котором  и циклы впадины и выступа начинаются в "мертвых" точках.
и циклы впадины и выступа начинаются в "мертвых" точках.
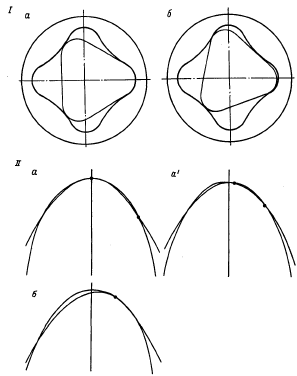
Рис. 5.6. Положение профилей в характерных фазах зацепления (i = 2:3; с0= 1,175):
I - i = 3:4; II - зуб ВГМ, i = 2:3;а - «мертвая» точка (  = 0);
= 0); 
Скоростная обстановка в контакте профилей определяется значениями и направлениями относительных скоростей движения (скоростей качения) точки касания по сопряженным профилям статора (  ) и ротора (
) и ротора (  ).
).
В точке касания взаимоогибаемых профилей векторы скоростей относительного движения перпендикулярны к вектору нормали.
Если скорости качения и направлены в противоположные стороны (или одна из них равна 0), то на контакте имеет место трение скольжения; если направление скоростей качения совпадает - трение качения, в случае равенства скоростей происходит чистое качение.
Как было показано ранее, взаимодействие профилей РО в любом поперечном сечении происходит на участках контакта впадин и выступов зубьев ротора, причем одновременно в контакте с профилем статора находятся z2 выступа ротора.
Поскольку на впадине ротора происходит качение профилей, а имеющийся здесь выпукло-вогнутый контакт обеспечивает минимальные напряжения, износостойкость и потери на трение в РО в решающей степени определяются условиями зацепления выступов ротора.
Цикл взаимодействия выступа зуба ротора со статором [53] совершается при повороте ротора на угол  (рис. 5.7). Чтобы определить скоростную обстановку в течение этого цикла, предварительно рассмотрим траектории точки контакта по сопряженным профилям [54].
(рис. 5.7). Чтобы определить скоростную обстановку в течение этого цикла, предварительно рассмотрим траектории точки контакта по сопряженным профилям [54].
Траектория точки контакта по профилю статора совпадает с ветвью исходного профиля АВ (рис. 5.8, а). Перемещение точки  определяется ее координатами
определяется ее координатами 
 относительно неподвижной системы.
относительно неподвижной системы.
Траектория точки контакта по выступу ротора - дуга CD (см. рис. 5.8, а), ограниченная точками с угловыми параметрами 
Положение контактной точки К на выступе ротора (рис. 5.8, б) определяется криволинейной координатой S2, равной расстоянию до точки начала отсчета (вершины зуба) 03, измеренному вдоль траектории (дуга К03). Следовательно,
 ;
;
Рис.5.7. Цикл взаимодействия выступа зуба ротора со статором
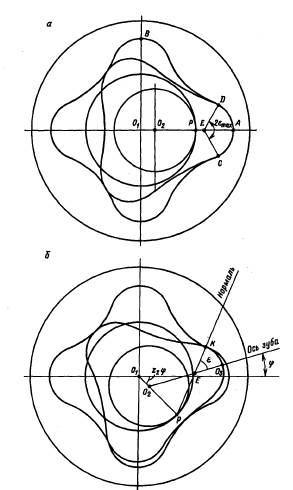
Рис.5.8. Траектория движения контактной точки по сопряженным профилям:
а-исходное положение; б-при повороте ротора на угол  .
.
 (5.15)
(5.15)
где 
В зацеплении со смещением скорости качения можно определить численным расчетом на компьютере.
В идеальном циклоидальном зацеплении (  = 0):
= 0):
выступ зуба ротора очерчен дугой окружности радиуса  (см. § 4.1.3), поэтому
(см. § 4.1.3), поэтому
dS2 =  5.16)
5.16)
где  - угол между осью зуба 0203 и отрезком ЕК, соединяющим точку К и центр кривизны выступа Е (см. рис. 5.8, б),
- угол между осью зуба 0203 и отрезком ЕК, соединяющим точку К и центр кривизны выступа Е (см. рис. 5.8, б),  ;
;
угловой параметр точки касания выступа и угол поворота ротора совпадают (  ).
).
С учетом указанных обстоятельств для идеального ВГМ скорости качения определяются следующим образом [54]:
 (5.17)
(5.17)
В центроидном зацеплении (с0 = 1)
 (5.18)
(5.18)
В механизме с однозаходным ротором (с0 = 1; z2 = 1)
 (5.19)
(5.19)
Графики изменения скоростей качения за цикл взаимодействия (рис. 5.9) показывают, что пара ротор - статор ВГМ относится к сопряжениям с переменными условиями касания и условия трения на контакте существенным образом зависят от кинематического отношения ВГМ.
В ВГМ с однозаходным ротором (см. рис. 5.9, а) скорости качения в течение всего цикла направлены в противоположные
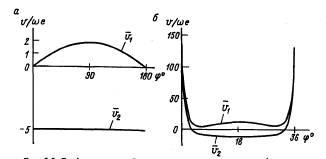
Рис. 5.9. Графики скоростей качения на контакте выступа зуба ротора:
a-i = 1:2; б - i = 9:10
стороны (причем  = idem), следовательно, в точке касания всегда имеет место трение скольжения.
= idem), следовательно, в точке касания всегда имеет место трение скольжения.
В многозаходных ВГМ скоростная обстановка в точке контакта имеет более сложный характер (см. рис. 5.9, б). В начале цикла направление скоростей  и
и  совпадает. При повороте ротора на угол
совпадает. При повороте ротора на угол  скорость
скорость  меняет знак (точка контакта движется к вершине зуба ротора) и векторы скоростей качения становятся противоположно направленными. При переходе через середину цикла
меняет знак (точка контакта движется к вершине зуба ротора) и векторы скоростей качения становятся противоположно направленными. При переходе через середину цикла  все происходит в обратном порядке. Таким образом, условия трения на выступе зуба ротора переменны: если в начале и конце цикла наблюдается трение качения с проскальзыванием, то в среднем интервале цикла - трение скольжения профилей.
все происходит в обратном порядке. Таким образом, условия трения на выступе зуба ротора переменны: если в начале и конце цикла наблюдается трение качения с проскальзыванием, то в среднем интервале цикла - трение скольжения профилей.
Подбором оптимального сочетания безразмерных параметров зацепления (с0, се,  ) можно варьировать скоростной обстановкой на контакте, добиваясь благоприятных условий трения сопряженных профилей с учетом контактных напряжений в паре (см. § 7.2).
) можно варьировать скоростной обстановкой на контакте, добиваясь благоприятных условий трения сопряженных профилей с учетом контактных напряжений в паре (см. § 7.2).
Результаты исследований координат особых точек циклоидального зацепления (см. § 4.1.3 и § 5.1) обобщены в табл. 5.1. Численные значения угловых параметров особых точек стандартного (с0 = 1,175) идеального гипоциклоидального зацепления приведены в табл. 5.2.
Таблица 5.1
Дата добавления: 2018-02-18; просмотров: 814; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!