ПЛОЩАДЬ И ПЕРИМЕТР ЖИВОГО СЕЧЕНИЯ РАБОЧИХ ОРГАНОВ
Площадь и периметр живого сечения - одни из основных геометрических параметров ВГМ, определяющие рабочий объем гидромашины и гидравлический радиус сечения.
Площадь живого сечения(занятого жидкостью) определяется разностью площадей  и S2, ограниченных исходным и сопряженным профилями:
и S2, ограниченных исходным и сопряженным профилями:
 (4.84)
(4.84)
Площади  и S2(рис. 4.34) в общем случае реечноциклоидального зацепления (см. § 4.1) рассчитываются методом численного интегрирования с использованием компьютера:
и S2(рис. 4.34) в общем случае реечноциклоидального зацепления (см. § 4.1) рассчитываются методом численного интегрирования с использованием компьютера:
 (4.85)
(4.85)
где  - площади секторов, ограниченных одной ветвью профиля:
- площади секторов, ограниченных одной ветвью профиля:
 (4.86)
(4.86)
О о
Элементарные площади  (см. рис. 4.34) определяются по текущим координатам профиля (по угловому параметру
(см. рис. 4.34) определяются по текущим координатам профиля (по угловому параметру  ).
).
Для обеспечения высокой точности интегрирования число расчетных точек принимается не менее 100.
При заданном эксцентриситете е площадь живого сечения определяется безразмерными параметрами ВГМ
 (4.87)
(4.87)
Натяг в паре и смещение рейки оказывают влияние на площадь живого сечения и при уточненных расчетах пренебрегать ими нельзя.
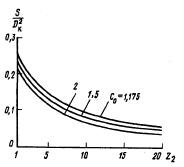
При постоянном контурном диаметре РО с увеличением числа заходов ротора площадь живого сечения уменьшается (рис. 4.35).
|
|
|
Периметр живого сечения("смоченный" периметр) определяется суммой периметров L1, L2 исходного и сопряженного профилей:
 .
.
Периметры (длины контуров профилей) в общем случае также определяются численным методом.
Для ВГМ с идеальным взаимоогибаемым гипоциклоидальным зацеплением (  = 0) получены точные аналитические выражения площадей и периметров [78, 94]:
= 0) получены точные аналитические выражения площадей и периметров [78, 94]:
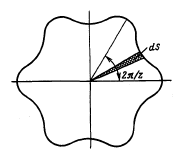 Рис. 4.34. К определению площади живого сечения
Рис. 4.34. К определению площади живого сечения
 (4.88)
(4.88)
Где E(k) – эллиптический интеграл второго рода  )
)
Интересно отметить, что разность длин периметров сопряженных профилей независимо от кинематического отношения и формы зубьев составляет 8е.
Для стандартной [131] геометрии профилей многозаходных механизмов (с0 = 1,175; се = 2,175)
 (4.89)
(4.89)
В ВГМ с центроидным зацеплением (с0 = 1) выражения (4.88) упрощаются:

 (4.90)
(4.90)
В механизме с однозаходным ротором (с0 = 1;  = 1;
= 1;  = 2 Гц)
= 2 Гц)
Рис. 4.3S. Зависимость площади живого сечения от кинематического отношения РО (  0; се =2,175)
0; се =2,175)
|
|
|
S = 4edcp = 8  (4.91)
(4.91)
 Для практических расчетов площади живого сечения многозаходных ВГМ можно использовать приближенную формулу, полученную из условия, что
Для практических расчетов площади живого сечения многозаходных ВГМ можно использовать приближенную формулу, полученную из условия, что  и
и  эквивалентны площадям кругов, диаметры которых равны средним диаметрам профилей (площадь кольца):
эквивалентны площадям кругов, диаметры которых равны средним диаметрам профилей (площадь кольца):
 (4.92)
(4.92)
Расчеты по (4.92) обеспечивают высокую точность, погрешность не превышает 5 %.
Гидравлический радиус сечения
 (4.93)
(4.93)
используется при определении гидравлических потерь в РО (см. § 5.7) и при пересчете характеристик гидродвигателя (см. § 6.4).
При расчетах ВГМ в ряде случаев требуется иметь зависимость текущей площади сечения шлюза  от угла поворота поверхности статора
от угла поворота поверхности статора  (или угла поворота ротора
(или угла поворота ротора  ). В частности, такая зависимость позволяет определить изменение площади сечения шлюза за цикл взаимодействия выступа зуба ротора (см. § 5.1).
). В частности, такая зависимость позволяет определить изменение площади сечения шлюза за цикл взаимодействия выступа зуба ротора (см. § 5.1).
|
|
|
Принимая во внимание монотонный характер изменения , с достаточной степенью точности можно принять гармонический закон [22]

где Smах - максимальная площадь сечения шлюза ( 
РАБОЧИЙ ОБЪЕМ ГИДРОМАШИНЫ
Рабочий объем - главный параметр, определяющий характеристики ВЗД, в частности крутящий момент и частоту вращения.
Между поверхностями РО образуется z1 - винтообразных каналов (камер), циклы которых сдвинуты по фазе на угол
 .
.
Рабочий объем определяется произведением объема всех рабочих камер Vo и кратности действия j гидромашины:
 (4.95) Объем рабочих камер характеризует объем жидкости, проходящий через гидродвигатель за один цикл (см. § 5.1)
(4.95) Объем рабочих камер характеризует объем жидкости, проходящий через гидродвигатель за один цикл (см. § 5.1)
Vo = ST. (4.96)
Кратность действия (число циклов, совершаемых за один оборот вала) ВГМ соответствует числу заходов винта
j = 
По терминологии, принятой в теории объемных машин, ВЗД представляет собой нерегулируемую многокамерную гидромашину многократного действия.
|
|
|
Рабочий объем ВЗД
 (4.97)
(4.97)
зависит от эксцентриситета и безразмерных параметров плоского и пространственного зацепления:
 . (4.98)
. (4.98)
При заданном контурном диаметре РО DK влияние безразмерных параметров проявляется через функцию безразмерного рабочего объема:
 (4.99)
(4.99)
 пропорционален коэффициенту формы винтовой поверхности. Зависимости
пропорционален коэффициенту формы винтовой поверхности. Зависимости  от других коэффициентов более сложные (рис. 4.36). Из представленных кривых следует, что наибольшее влияние на рабочий объем оказывает кинематическое отношение ВГМ. Увеличение коэффициентов внецентроидности с0 и смещения
от других коэффициентов более сложные (рис. 4.36). Из представленных кривых следует, что наибольшее влияние на рабочий объем оказывает кинематическое отношение ВГМ. Увеличение коэффициентов внецентроидности с0 и смещения  приводит к незначительному снижению V. Влияние коэффициента формы зуба
приводит к незначительному снижению V. Влияние коэффициента формы зуба  неоднозначно, при определенных геометрических параметрах ВГМ может существовать форма зуба, обеспечивающая максимальный в данных условиях рабочий объем.
неоднозначно, при определенных геометрических параметрах ВГМ может существовать форма зуба, обеспечивающая максимальный в данных условиях рабочий объем.
В табл. 4.1 приведены значения основных геометрических параметров (контурный диаметр DK, эксцентриситет е, кинематическое отношение i, шаг статора Т, площадь S и периметр Lr живого сечения, площадь проекции контактных линий SK, рабочий объем V) РО отечественных серийных двигателей [10, 85, 94].
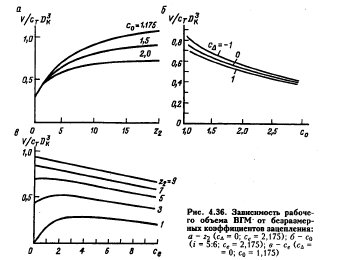
Таблица 4.1
Дата добавления: 2018-02-18; просмотров: 838; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!