Натяги и моменты свинчивания резьб ВЗД
| Натяг, мм | Момент свинчива- | ||
| Обозначения резьб | при первом свин- | при втором свинчи- | ния, кНм |
| чивании | вании | ||
| Замковые резьбы | |||
| 3-171 | 1,0 ± 0,4 | 0,7± 0,4 | 28-31 |
| 3-152 | 0,6 ± 0,4 | 0,5 + 0,4 | 27-30 |
| 3-147 | 1,0 + 0,4 | 0,7 ± 0,4 | 27-30 |
| 3-133 | 0,6 ± 0,4 | 0,5 + 0,4 | 15-17 |
| 3-117 | 0,5 ± 0,4 | 0,4 ±0,4 | 13-15 |
| 3-101 | 0,5 ± 0,4 | 0,4 ± 0,4 | 9,5-11 |
| 3-88 | 0,5 ± 0,4 | 0,4 ± 0,4 | 8-9 |
| 3-76 | 0,5 ± 0,4 | 0,4 ± 0,4 | 6,5-7,5 |
| 3-42 | 0,5 ± 0,4 | 0,4 ± 0,4 | 3-3,5 |
| Резьбы конические турбобуров | |||
| РКТ 218x6,35x1:16 | 3,2 ± 0,7 | 2,5 ±0,7 | 32-34 |
| РКТ 177x5,08x1:16 | 3,0 ± 0,7 | 2,2 ±0,7 | 25-27 |
| Резьбы метрические конические | |||
| (с наружным упором по торцу муфты и упорному уступу ниппеля) | |||
| МК 156x5,5x1:32 | 3,2 ±0,8 | 2,6 ± 0,8 | 16-18 |
| МК 140x6x1:16 | 2,4 ± 0,7 | 2,1± 0,7 | 15-17 |
| МК 119x4x1:16 LH | 2,4 ± 0,7 | 2,1 ± 0,7 | 9,5-11 |
| МК 112x4x1:32 | 2,0 ±0,8 | 1,4 ± 0,8 | 5,5-6,5 |
| МК 97,5x4x1:12 | 1,6 ± 0,4 | 1,6 ± 0,4 | 5-7 |
| МК 94x4x1:32 LH | 2,0 ± 0,8 | 1,4 ± 0,8 | 12-13,5 |
| МК 84x6x1:16 | 1,3 ±0,7 | 1,0 ± 0,7 | 12-13,5 |
| МК 84x5,5x1:16LH | 1,3 ± 0,7 | 1,0 ±0,7 | 11-12,5 |
| МК 75x6x1:16 | 1,3 ±0,7 | 1,0 ± 0,7 | 6,5-7,5 |
| МК 76x4x1:32 | 1,6 ±0,8 | 1,3 ±0,8 | 4-5 |
| МК 60x6x1:16 | 1,3 ±0,7 | 1,0 ± 0,7 | 4,5-5,5 |
| МК 50x4x1:16 | 1,3 ±0,7 | 1,0 ± 0,7 | 3-4 |
| МК 50x5x1:16 LH | 1,3 ±0,7 | 1,0 ±0,7 | 3-4 |
| МК 51х 4x1:16 | 1,3 ±0,7 | 1,0 ± 0,7 | 3-4 |
| НКБ 54x3,175x1:16 | 1,3 ±0,7 | 1,0 ±0,7 | 0,9-1,2 |
| МК 42x2,5x1:16 | 1,3 ±0,3 | 1,0 ± 0,3 | 1,3-1,7 |
| МК 40x4x1:16 LH | 1,3 ±0,3 | 1,0 ±0,3 | 3-4 |
| Резьбы метрические конические | |||
| (с упором по торцу ниппеля и внутреннему уступу муфты) | |||
| МК 116x6x1:16-ВТ | 1,3 ±0,7 | 1,0 ±0,7 | 10-12 |
| МК 98x6x1.16-ВТ | 1,3 ±0,7 | 1,0 ±0,7 | 8-9 |
| МК 90x6x1:16-ВТ | 1,3 ±0,7 | 1,0 ±0,7 | 8-9 |
| МК 75x6x1:16-ВТ | 1,3 ± 0,7 | 1,0 ±0,7 | 7-7,5 |
| МК 60x6x1:16-ВТ | 1,3 ±0,7 | 1,0 ± 0,7 | 7-7,5 |
| МК 50x4x1:16-ВТ | 1,3 ± 0,7 | 1,0 ±0,7 | 5-6 |
| МК 35x4x1:16-ВТ | 1,3 ±0,7 | 1,0 ± 0,7 | 1-1,2 |
FH, по профилю и размерам полностью соответствующие аналогичным замковым резьбам по ГОСТ Р 50864-96 (табл. 3.8).
|
|
|
Резьбы типа Reg относятся к нормальному типу соединений и отличаются увеличенной конусностью (1:4) в сравнении с другими типами резьб.
Таблица 3.8
| Присоединительные резьбы, по стандарту API7 (США) | Аналог замковой резьбы, по ГОСТ P 50864-96 | Присоединительные резьбы, по стандарту API7 (США) | Аналог замковой резьбы, по ГОСТ P 50864-96 |
| NC 12 1 \/4Reg 2 3/8 Reg NC 26 2 7/8 Reg 3 1/2 Reg 3 1/2 IF | 3-35 Нет аналога3-66 3-73 3-76 3-88 3-102 | 4 1/2 Reg NC 46 NC 50 5 1/2 Reg 6 5/8 Reg 7 5/8 Reg | 3-117 3-122 3-133 3-140 3-152 3-177 |
Резьбы NC имеют, как правило, конусность 1:6 с шагом резьбы 6,35 мм (4 нитки на 1 дюйм).
Моменты крепления, рекомендуемые при свинчивании резьб по стандарту API 7 (США) для двигателей диаметром 120 мм и менее, соответствуют отечественному стандарту, а для больших диаметров - выше в 1,2-1,5 раза.
Для соединения корпусных деталей и системы ротор - вал применяются конические резьбы ТРЕ, а также цилиндрические резьбы с трапецеидальным и треугольным профилем ACME. Эти резьбы не имеют аналогов в отечественных конструкциях.
|
|
|
ГЛАВА 4
ГЕОМЕТРИЯ РАБОЧИХ ОРГАНОВ
ГЕОМЕТРИЯ ПЛОСКОГО ЗАЦЕПЛЕНИЯ
ПРОФИЛИРОВАНИЕ РАБОЧИХ ОРГАНОВ
Теория профилирования рабочих органов героторных машин имеет давнюю историю и берет свое начало от циклических кривых. Плоское циклоидальное зацепление используется в различных отраслях техники: в роторных насосах, компрессорах и ДВС; бесшпоночных соединениях; зубчатых передачах [61, 143].
Исходный профиль
Рабочие органы ВЗД в общем случае профилируются от исходного контура циклоидальной рейки (эквидистанты смещенной циклоиды*), связанного с инструментальной прямой 4, по которой для образования циклоиды 1 перекатывается без скольжения окружность 6 радиуса г (рис. 4.1).
Для профилирования применяются укороченные (е < г) циклоиды, удлиненные (е > r) и обыкновенные (е = г) не используются из-за самопересечений и заострений [94].
Исходный циклоидальный профиль" образуется как огибающая семейства контуров рейки (рис. 4.2) при обкатке инструментальной прямой неподвижной направляющей окружности 5 радиуса rz1 [56, 140]. Если катящаяся окружность 6 расположена внутри направляющей 5, то при обкатке получается гипоциклоидальная кривая (см. рис. 4.2). Если же окружность 6 расположена вне направляющей - эпициклоидальная кривая.
|
|
|
Пусть в начальном положении (см. рис. 4.1) инструментальная прямая 4 (ось ур подвижной системы координат хрур), свя-
*Циклоида - кривая, описываемая точкой, связанной с окружностью, катящейся без скольжения по прямой линии [68].
Параметры исходного и сопряженного профилей обозначаются соответственно индексами 1 и 2.

Рис.4.1.К образованию циклоидального профиля:
1-укороченная циклоида; 2-смешанная циклоида; 3-эквидистанта; 4-инструментальная прямая; 5-направляющая окружность; 6-катящаяся окружность.

Рис.4.2. Образование исходного гидроциклоидального профиля методом обкладки рейки.
занная с контуром рейки, расположена перпендикулярно к неподвижной горизонтальной оси х.
Параметрические уравнения циклоиды (относительно осей хрур) имеют вид
х0 =  ;
;
(4.1)
 ,
,
где  - угловой параметр циклоиды (относительный угол поворота катящейся окружности),
- угловой параметр циклоиды (относительный угол поворота катящейся окружности),  = 0
= 0  2
2  ; с0 - коэффициент внецентроидальности, с0 = r/е;
; с0 - коэффициент внецентроидальности, с0 = r/е;  - коэффициент типа профиля
- коэффициент типа профиля
|
|
|
(орт передаточного отношения), 
Передаточное отношение и - векторная величина, равная отношению средних за цикл (у = 2 ) абсолютных угловых скоростей катящейся окружности и инструментальной прямой:

 = 1 при образовании эпициклоидального профиля (направления углов поворота катящейся окружности
= 1 при образовании эпициклоидального профиля (направления углов поворота катящейся окружности  и инструментальной прямой
и инструментальной прямой  совпадают);
совпадают);  при образовании гипоциклоидального профиля.
при образовании гипоциклоидального профиля.
Параметрические уравнения исходного контура рейки имеют вид
хр = х0 +  ;
;
(4.2)
yp = y0 +  ,
,
где  - угол наклона нормали рейки к инструментальной прямой (угол профиля),
- угол наклона нормали рейки к инструментальной прямой (угол профиля),
 ; (4.3)
; (4.3)
А =  (4.4)
(4.4)
После подстановки (4.1), (4.3) в (4.2) и преобразований получаем
 (4.2а)
(4.2а)

Где q=1-  - кэффициент формы зуба, се = rц/е; W =
- кэффициент формы зуба, се = rц/е; W = 
 Рис.4.3.Текущее положение рейки при обкатке.
Рис.4.3.Текущее положение рейки при обкатке.
В текущем положении при обкатке инструментальной прямой рейка поворачивается на угол  (рис. 4.3). Поскольку обкатка производится без скольжения, семейство кривых рейки описывается следующими параметрическими уравнениями относительно неподвижных осей ху:
(рис. 4.3). Поскольку обкатка производится без скольжения, семейство кривых рейки описывается следующими параметрическими уравнениями относительно неподвижных осей ху:
X =  ; (4.5)
; (4.5)
У = (х0 + rz1) sin  p + (y0 – rz1
p + (y0 – rz1  р) cos
р) cos  p.
p.
Уравнения (4.5) содержат два переменных угловых параметра  и
и  . Для перехода к уравнению огибающей семейства кривых необходимо установить зависимость между
. Для перехода к уравнению огибающей семейства кривых необходимо установить зависимость между  и
и  . Ее можно получить двумя способами:
. Ее можно получить двумя способами:
с помощью известной теоремы, утверждающей, что точки огибающей входят в состав множества, в котором дискриминанта семейства кривых равна 0 [106], т.е.

 (4.6)
(4.6)
через геометрические построения: нормаль к огибающей семейства кривых проходит через полюс Р - точку касания инструментальной прямой и направляющей окружности (см. рис. 4.3). Координаты точки, принадлежащей огибающей рейке, можно найти, приравняв (4.3) и выражение тангенса угла наклона проходящей через полюс нормали, зависящее от угла поворота  ,
,

Рис.4.4Зависимость угла поворота рейки от углового параметра  при различных коэффициентах смешения (z1=6; с0=1,175)
при различных коэффициентах смешения (z1=6; с0=1,175)
 (4.7.)
(4.7.)
Т.е.
 (4.8)
(4.8)
Решая (4.6) и (4.8) относительно  , получаем идентичные в обоих случаях выражения [56]:
, получаем идентичные в обоих случаях выражения [56]:
 (4.9)
(4.9)
где  - угловое смещение,
- угловое смещение,
 А (4.10)
А (4.10)
 - коэффициент смещения,
- коэффициент смещения, 
Угловое смещение характеризует отличие между углом поворота  и угловым параметром
и угловым параметром  , профиля со смещением (рис. 4.4).
, профиля со смещением (рис. 4.4).
Если смещение отсутствует, то с помощью уравнения связи (4.9) параметрические уравнения огибающей семейства рейки (исходного профиля) приобретают вид


Где  -модуль передаточного отношения,
-модуль передаточного отношения, 

Или в безразмерном (относительном) виде


(4.13)
Данные уравнения являются общими и справедливы для любой ветви профиля на всем интервале изменения углового параметра т или угла поворота  (0
(0  ).
).
Векторная форма.При описании исходного циклоидального профиля можно перейти от параметрической к векторной форме и представить профиль как траекторию сложного движения точки при согласованном вращении векторов.
Впервые векторный способ построения циклоидальной кривой был предложен в 1871 г. Франсуа, который показал, что если две стороны шарнирного параллелограмма вращаются равномерно, но с разными угловыми скоростями  , и
, и  ,то на комплексной плоскости G его вершина описывает эпи- или гипоциклоиду:
,то на комплексной плоскости G его вершина описывает эпи- или гипоциклоиду:
 (4.14)
(4.14)
где  -стороны параллелограмма;
-стороны параллелограмма;  = -1.
= -1.
Выражение (4.14) является частным случаем уравнения

выражающего циклоиды высшего порядка.
Применительно к ВГМ возможны два способа векторного изображения профиля:
1. Четырьмя векторами [56] (рис. 4.5)
 (4.16)
(4.16)
Где 
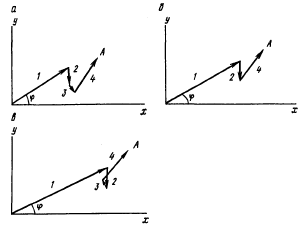
Рис. 4.5. Четырехвекторная диаграмма точкиА (  =120)гипоциклоидального профиля(z1= 4: с0 = 1,5; се =2):
=120)гипоциклоидального профиля(z1= 4: с0 = 1,5; се =2):
а -  = -1 (
= -1 (  = 34,1); б - = 0 (
= 34,1); б - = 0 (  = 30'); в - = 1 ( = 25,9°)
= 30'); в - = 1 ( = 25,9°)
Передаточное отношение u1определяет среднюю кратность фаз векторов 1 и 2. Если векторы 1 и 2 вращаются в противоположных направлениях, то образуется гипоциклоида (u1 < 0); если направление векторов совпадает - эпициклоида (u1 > 0).
Один из четырех векторов - вектор смещения 3 (см. рис. 4.5) имеет знакопеременный модуль  , зависящий от углового параметра. Среднее интегральное значение модуля вектора смещения за период
, зависящий от углового параметра. Среднее интегральное значение модуля вектора смещения за период  равно нулю. В общем случае (
равно нулю. В общем случае (  ) вследствие углового смещения мгновенная кратность фаз векторов 1 и 2 не равна передаточному отношению и. Векторы 3 и 4 смещены по фазе относительно радиуса-вектора 1 соответственно на
) вследствие углового смещения мгновенная кратность фаз векторов 1 и 2 не равна передаточному отношению и. Векторы 3 и 4 смещены по фазе относительно радиуса-вектора 1 соответственно на  и
и 
Отличие векторных диаграмм профилей с различным смещением циклоиды (см. рис. 4.5) состоит в том, что при положительном смещении (  > 0) вектор эквидистанты 4 пересекает единичный вектор 2.
> 0) вектор эквидистанты 4 пересекает единичный вектор 2.
2. Двумя векторами (рис. 4.6)

Где m-модуль вектора2 (PA)

Модуль радиуса-вектора / (0Р) соответствует радиусу направляющей окружности, am- переменная величина, зависящая от угла поворота  .
.

Рис. 4.6. Двухвекторная диаграмма точки гипоциклои-дального профиля
Частные случаи.При крайних значениях одного из безразмерных коэффициентов (  , с0, се) циклоидальный профиль превращается в:
, с0, се) циклоидальный профиль превращается в:
1) идеальный (некорригированный) циклоидальный профиль, получаемый без смещения контура рейки (  = 0). Графически он может быть получен и "классическим" способом [94] при качении окружности не по прямой (для "заготовки" рейки), а непосредственно по направляющей окружности (рис. 4.7)*. Результаты построения идеального циклоидального профиля при этом получаются идентичными:
= 0). Графически он может быть получен и "классическим" способом [94] при качении окружности не по прямой (для "заготовки" рейки), а непосредственно по направляющей окружности (рис. 4.7)*. Результаты построения идеального циклоидального профиля при этом получаются идентичными:

 (4 18)
(4 18)
2) центроидный профиль - частный случай идеального профиля (рис. 4.8), когда производящая точка расположена на катящейся окружности (с0 = 1):


Данные уравнения относятся только к нечетным ветвям профиля, в том числе к первой (  ,) ветви.
,) ветви.
* Кривая, описываемая в этом случае точкой, связанной с окружностью, называется гипоциклоидой (внутреннее качение) или эпициклоидой (внешнее качение).


Предельными гипоциклоидальными центроидными профилями являются (см. рис. 4.8):
а) однозубый профиль (z1= 1; и = 0) - окружность радиуса
Rц,
б) двузубый профиль (z1 = 2;u = -1)- параллельные прямые линии
х = 2ecos  ; (4.20)
; (4.20)
Комбинация этих двух профилей образует сечение механизма, используемого в РО винтовых насосов (насосы Муано) и высокооборотных гидродвигателей, в том числе в первых конструкциях ВЗД "Dyna-Drill" [22, 87].
3) "скелетный" профиль [111] - вырожденный профиль (рис. 4.9), образованный как огибающая семейства циклоиды (смещенной или несмещенной), а не ее эквидистанты (се = 0):

 (4.21)
(4.21)
Скелет идеального профиля - обыкновенная гипо- или эпициклоида (см. рис. 1.4).
Скелетный профиль используется при профилировании РО роторно-поршневых гидромашин, ДВС и компрессоров [61].
Сопряженный профиль
Сопряженный профиль образуется как огибающая исходного профиля при взаимном обкатывании центроид профилей. Вид сопряженного профиля не зависит от способа обкатки (относительного движения центроид) и одинаков при зацеплении с неподвижными осями, при закрепленной наружной или внутренней центроиде [94,117].
При построении сопряженного профиля задаются параметрические уравнения исходного профиля (  ) и радиусы центроид исходного а и сопряженного b профилей [117].
) и радиусы центроид исходного а и сопряженного b профилей [117].
В ВГМ с внутренним зацеплением и числами зубьев профилей, отличающихся на единицу, радиусы центроид пропорциональны эксцентриситету: а = ez1 b = еz2 [94].В гипоциклои-дальном зацеплении исходный профиль является наружным элементом (z1 = z2 + 1), в эпициклоидальном - внутренним (z1=z2 -1). Межосевое расстояние равно эксцентриситету зацепления е.
Расчет координат сопряженного профиля рассмотрим на примере гипоциклоидального зацепления, в котором исходный профиль является неподвижным наружным элементом (статором). Пусть в начальном положении (рис. 4.10, а) полюс зацепления Р (точка касания центроид) и точка касания профилей (т = 0) лежат на оси х, совпадающей с нормалью.
При обкатке центроида сопряженного профиля совершает планетарное движение. В текущем положении при ее повороте на угол  против часовой стрелки (рис. 4.10, б) ось центроиды 02 и полюс зацепления Р поворачиваются вокруг центра исходного профиля в обратном направлении на угол z2
против часовой стрелки (рис. 4.10, б) ось центроиды 02 и полюс зацепления Р поворачиваются вокруг центра исходного профиля в обратном направлении на угол z2  . При этом в зацеплении оказывается точка К с угловым параметром
. При этом в зацеплении оказывается точка К с угловым параметром  .
.

Координаты точки касания относительно неподвижных осей  заданы. Координаты сопряженного профиля - координаты точки относительно подвижных осей х2у2, связанных с внутренней центроидой.
заданы. Координаты сопряженного профиля - координаты точки относительно подвижных осей х2у2, связанных с внутренней центроидой.
Переход от координат  к координатам х2у2 проводится в два этапа:
к координатам х2у2 проводится в два этапа:
параллельный перенос осей в центр сопряженного профиля 02;
преобразование координат при повороте осей на угол  . В результате координаты сопряженного профиля представляются в виде
. В результате координаты сопряженного профиля представляются в виде


Уравнения (4.22)содержат две угловые переменные (  ). Для перехода к параметрическим уравнениям с одной переменной необходимо установить зависимость между углом поворота
). Для перехода к параметрическим уравнениям с одной переменной необходимо установить зависимость между углом поворота  и угловым параметром
и угловым параметром  .
.
Уравнение связи определяется из основной теоремы зацепления (Виллиса), согласно которой нормаль в точке касания проходит через полюс [117]. Приравнивая выражения тангенса угла наклона а к оси х нормали к исходному профилю

и аналогичной величины из  КРВ (см. рис. 4.10), получаем:
КРВ (см. рис. 4.10), получаем:
 (4.24)
(4.24)
В общем случае зацепления со смещением выражение (4.24)может быть решено только численным методом.
В идеальном зацеплении (4.24)упрощается до вида
 (4.25)
(4.25)
Это уравнение имеет два решения относительно 
 ; (k=0,1,2….,z1-2);
; (k=0,1,2….,z1-2);
 (4.26.)
(4.26.)

Рис. 4.11. Сопряженный гипоциклоидальный профиль
(z2 = 3; с0 = 1,175; се = 2,175)
Наличие двух корней уравнения связи означает:
в каждый момент времени зацепление профилей происходит
на выступах (корень  ) и впадинах (корень
) и впадинах (корень  ) сопряженного
) сопряженного
профиля;
уравнение сопряженного профиля необходимо рассматривать отдельно для его выступов и впадин (рис. 4.11).
Подставив в (4.22) выражения  и
и  , можно получить соответственно параметрические уравнения выступов и впадин зубьев сопряженного профиля. В частности, уравнение выступа первого зуба (k = 0)
, можно получить соответственно параметрические уравнения выступов и впадин зубьев сопряженного профиля. В частности, уравнение выступа первого зуба (k = 0)

Уравнения (4.27), как показано A.M. Кочневым [94], есть уравнения окружности, центр которой находится в точке с координатами [z2r; 0], т.е. выступ зубьев сопряженного идеального профиля (в том числе и внецентроидного) очерчен дугой окружности радиуса эквидистанты гц.
Дуга окружности выступа зуба сопряженного профиля ab (см. рис. 4.11) ограничивается точками с угловым параметром  . Центральный угол выступа
. Центральный угол выступа  (см. § 5.1) для профилей с одинаковым коэффициентом внецентроидности не зависит от кинематического отношения:
(см. § 5.1) для профилей с одинаковым коэффициентом внецентроидности не зависит от кинематического отношения:
Значения углов  для различных с0 составляют:
для различных с0 составляют:
с0.................. 1,0 1,175 1,25  1,5 2,0
1,5 2,0
 °.................. 180 116,7 106,3 90 83,6 60
°.................. 180 116,7 106,3 90 83,6 60
В центроидном зацеплении (с0 = 1)
 (4.28)
(4.28)
и уравнения впадин сопряженного профиля упрощаются до вида

 (4.29)
(4.29)
Из сравнения (4.29) с выражениями (4.19) следует, что в центроидном зацеплении впадина сопряженного профиля представляет собой эквидистанту правильной гипоциклоидальной кривой с числом вершин на единицу меньше, чем у исходного профиля.
В общем случае внецентроидного зацепления сопряженный профиль, строго говоря, не является циклоидальным и очерчивается сложной кривой. В связи со сложностью математического описания идеально сопряженного профиля (различные уравнения его выступов и впадин, нециклоидальность кривых) на практике отступают от идеальной формы [131]: сопряженный профиль, как и исходный, строится по контуру рейки по уравнениям


Смещение сопряженного профиля x2 отличается от  и выбирается из условия касания вершин выступов и впадин профилей (при
и выбирается из условия касания вершин выступов и впадин профилей (при  = 0).
= 0).
При использовании идеального исходного профиля (  = 0) смещение рейки при образовании сопряженного профиля сохраняется.
= 0) смещение рейки при образовании сопряженного профиля сохраняется.
Получаемое зацепление, строго говоря, является приближенным и не обеспечивает идеального (взаимоогибаемого) сопряжелаза на такую погрешность, поскольку она, с одной стороны, компенсируется эластичностью обкладки статора, а с другой -делает зацепление наиболее технологичным, так как позволяет нарезать одной фрезой роторы и сердечники пресс-формы статора различных кинематических отношений и шагов, а, кроме того, за счет смещения фрезы выполнять ВГМ различных диаметров и натягов [114, 140].
Кроме того, целесообразность применения реечного сопряженного профиля обусловливается тем, что для обеспечения заданных характеристик гидромашины необходимо предусмотреть диаметральный натяг 5 между зубьями РО:

Гед Dк- диаметр выступов зубьев внутреннего элемента (см. § 8.1).
Натяг создается за счет увеличения диаметров выступов и впадин зубьев внутреннего элемента (сопряженного профиля в гипоциклоидальном зацеплении), для чего контур рейки последнего получает дополнительное положительное смещение на величину  /2.
/2.
Контуры гипо- и эпициклоидальных профилей при различных значениях безразмерных параметров (  ) показаны на рис. 4.12.
) показаны на рис. 4.12.
Контурный диаметр РО - максимальный диаметр наружного элемента (см. рис. 4.1)
 (4.31)
(4.31)
Поскольку при профилировании рабочих органов ВЗД используется главным образом гипоциклоидальное зацепление, исходным профилем [94] которого является наружный элемент (статор), теория зацепления далее рассматривается применительно к гипоциклоидальным ВГМ. Основные формулы приводятся как для общего случая гипоциклоидального зацепления (4.12), так и для трех его частных случаев (идеального, центроидного и скелетного зацепления).
Погрешность реечноциклоидального зацепления (заметное на контакте выступа зуба ротора со впадиной статора) существенно зависит от сочетания безразмерных коэффициентов ВГМ. Отклонение реечного сопряженного профиля от идеального (рис. 4.13), построенного как огибающая исходного профиля, особенно проявляется при высоких коэффициентах внецентро-идности (рис. 4.14) и отрицательных коэффициентах смещения. Следовательно, для профилирования РО целесообразно исполь-

Рис. 4.12. Гипо- и эпициклоидальные профили при различных значениях безразмерных параметров (DK - idem):
I - числа зубьев г, (  = 0; с0 = 1,5; се = 2): а - z = 2; б - z = 4; в - z = 6; II -коэффициента внецентроидности с0 (
= 0; с0 = 1,5; се = 2): а - z = 2; б - z = 4; в - z = 6; II -коэффициента внецентроидности с0 (  = 4; = 0; се = 2): а - с0 = 1,25; б – с 0 b-c0=2
= 4; = 0; се = 2): а - с0 = 1,25; б – с 0 b-c0=2
3-коээфициента формы зуба се (z1 = 4; = 0; с0 = 1,5): а -се=0; 6- се = 2; в - се = 4; IV - коэффициента смещения (z1 = 4; с0 = 1,5 ;се = 2): а - = -1; б - = 0; в - = 1 ; 1- гипоциклоида; 2 - эпициклоида

Рис. 4.13. Идеальное гипоциклоидальное зацепление (i =2:3; c0 - 1,5; се - 2)
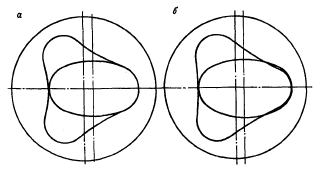
Рис. 4.14. Реечноциклоидальиое зацепление (i - 2:3; с0 - 0; сe- 2) при различных значениях коэффициента внецентроидности с0:
а = 1,1; б - 1,5; в - 2,0
зовать рейки с положительным смещением и коэффициентом внецентроидности близким к 1.
При изготовлении статора и ротора их фактические профили отличаются от номинальных (описываемых уравнениями, приведенными выше) и регламентируются соответствующими допусками.
Погрешности формообразования профилей РО можно разделить на:
технологические погрешности при изготовлении ротора и сердечника пресс-формы статора, возникающие из-за неточностей расчета, изготовления и установки фрез, а также из-за износа инструмента, температурных деформаций, нежесткости системы станок - приспособление - инструмент - деталь [141];
погрешности, связанные с усадкой эластичной обкладки статора [140].
При использовании одной фрезы данного модуля для изготовления РО с различными осевыми шагами возникают погрешности профилирования статора, поэтому отклонение осевого хода механизма от номинального ограничивается допуском.
В процессе эксплуатации ВЗД расчетная геометрия РО нарушается также вследствие воздействия на обкладку статора забойного гидростатического давления и температуры. Влияние указанных факторов приводит к изменению напряженно-деформированного состояния РО, значительным контактным напряжениям, неравномерному износу зубьев [108].
Теория проектирования технологической оснастки, обеспечивающей минимальные отклонения профилей РО от номинала, равномерный натяг в паре и компенсацию усадки резины, разработана Ю.А. Коротаевым и А.В. Цепковым и представлена в [140, 141]. Критерием оценки точности формообразования РО является погрешность натяга в зацеплении, определяющая надежность и долговечность ВГМ.
Дата добавления: 2018-02-18; просмотров: 5058; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!