Особые точки циклоидального зацепления
| Название | Угловой параметр | Отличительная особенность | Формула определения |
| Вершина выступа профиля Вершина впадины профиля Точка перегиба Точка минимального радиуса кривизны Точка, нормаль в которой касается центроид профилей Точка, нормаль в которой проходит через полюс зацепления в исходном положении | 





| Точка возврата профиля Мертвая" точка зацепления Центр ветви профиля Точка, максимально удаленная от полюса зацепления Максимальная скорость скольжения Смена знака кривизны исходного профиля Максимальное контактное напряжение Разделение профиля ротора на выступ и впадину Запаздывание цикла впадины ротора относительно "мертвой" точки Изменение условий трения ротора: переход от качения к скольжению Наибольшее отклонение нормали к поверхности от торцовой плоскости Точка касания впадины ротора в исходном положении | 
 Или
Или 
|
Таблица 5.2
Угловые параметры особых точек зацепления
| i | 
| 
| 
| 
|
| 3:4 5:6 9:10 | 7,92 5,28 3,17 | 11,61 6,61 3,58 | 15,39 12,27 9,08 | 21,90 12,25 6,61 |
КРУТЯЩИЙ МОМЕНТ
Механизм образования крутящего момента рассмотрим на примере идеальных гидродвигателей (одно- и многошагового), в которых отсутствуют объемные, механические и гидравлические потери, т.е. подводимая гидравлическая мощность полностью преобразуется в полезную мощность на валу ВЗД.
|
|
|
Одношаговый двигатель
Анализ рабочего процесса начнем с рассмотрения распределения давления жидкости в полостях ВЗД, образованных между винтовыми поверхностями ротора и статора.
Рассмотрим рабочие органы с левой нарезкой и расположим оси координат хуz таким образом, чтобы ось z совпала с осью статора. Предположим, что в данный момент времени ротор занимает положение, при котором его ось совпадает с прямой х = 0, у = е (рис. 5.10). В этом случае впадина зуба ротора входит в зацепление с выступом зуба статора в среднем сечении (z = = Т/2) РО.
Условимся полости, гидравлически связанные с областями высокого или низкого давления, называть камерами, а полости, разобщенные от областей высокого или низкого давления, -шлюзами [87].
На рис. 5.11 представлены поперечные сечения (срезы) РО с кинематическим отношением i = 9:10. Для простоты изображения срезы выполнены равномерно по длине РО через интервалы  . Для выбранного момента времени (угла поворота ротора) шлюзы отсутствуют. В любом поперечном сечении имеется
. Для выбранного момента времени (угла поворота ротора) шлюзы отсутствуют. В любом поперечном сечении имеется  камер, разделенных между собой контактными точками. Хотя относительная конфигурация срезов остается постоянной, каждый срез характеризуется специфическим распределением давления в камерах.
камер, разделенных между собой контактными точками. Хотя относительная конфигурация срезов остается постоянной, каждый срез характеризуется специфическим распределением давления в камерах.
|
|
|
Так, в первом сечении (z = 0) жидкость с высоким давлением занимает все камеры, в сечении (z = Т/2) только половина камер заполнена жидкостью с высоким давлением и т.д. (см. рис. 5.11). Для выбранного положения ротора разобщение полостей высокого и низкого давлений происходит на длине z = t.
Анализируя распределение давления жидкости в полостях РО, можно заметить, что в каждом сечении РО на длине шага ротора возникает неуравновешенная радиальная гидравлическая сила. Исключение составляют концевые сечения 1, 2 и 9, 10 (см. рис. 5.11), в которых все камеры соединяются соответствен-

Рис. 5.10. Схема действия гидравлических сил в поперечном сечении РО
но с входом и выходом и где устанавливается одинаковое давление жидкости.
Если рассмотреть произвольное сечение и на расстоянии dz от него провести второе сечение, то элементарная гидравлическая сила выразится уравнением
dF = PLpdz, (5.20)
где Р - перепад давления в рабочих органах; Lр - длина площадки, на которую действует гидравлическая сила.
В отличие от механизмов с однозаходным ротором (i = 1:2), во многозаходных ВГМ по длине РО изменяется не только ориентация (угол наклона) площадки, но и ее длина Lp.
|
|
|
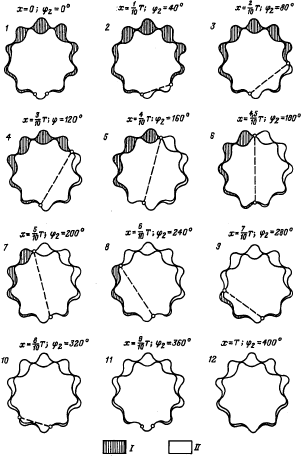
Рис. 5.11. Распределение давления жидкости в камерах РО:
I - область высокого давления; II- область низкого давления
На длине шага ротора (в интервале угла поворота винтовой поверхности ротора  ) длина площадки с достаточной точностью описывается гармонической зависимостью [87]:
) длина площадки с достаточной точностью описывается гармонической зависимостью [87]:
 (5.21)
(5.21)
где D - расчетный диаметр.
Расчетным диаметром является (см. рис. 5.10) диаметр статора по выступам зубьев (он же средний диаметр ротора)
D = DK — 4е. (5.22)
В общем случае D является функцией безразмерных параметров зацепления (i, с0, се, с  ).
).
Допущение (5.21) означает, что проекция контактных линий на плоскость ху - окружность;  АОВ - равнобедренный и, следовательно, в любом сечении РО вектор элементарной гидравлической силы проходит через центр сечения статора и наклонен к оси 0x под углом
АОВ - равнобедренный и, следовательно, в любом сечении РО вектор элементарной гидравлической силы проходит через центр сечения статора и наклонен к оси 0x под углом
 (5.23)
(5.23)
Подставляя в уравнение (5.20) выражение (5.21) и учитывая,
что
|
|
|
 (5.24)
(5.24)
получаем
 (5.25)
(5.25)
Разложим силу dF на две составляющие: dFx, dFv (см. рис. 5.10).
Сила dFx создает крутящий момент ротора относительно полюса зацепления, а сила dF  совместно с инерционной силой dFин (см. § 5.5) образует поперечную силу.
совместно с инерционной силой dFин (см. § 5.5) образует поперечную силу.
Проекции элементарных сил на координатные оси
 (5.26)
(5.26)
 (5.27)
(5.27)
Составляющая силы dFy изменяет свое направление по длине РО: на половине высокого давления (z < Т/2) она прижимает ротор к полюсу зацепления, на половине низкого давления (z > Т/2) - отжимает ротор. В связи с этим проекции радиальных гидравлических сил, действующих на ротор, определяются следующим образом:
 (5.28)
(5.28)
 (5.29)
(5.29)
Элементарный крутящий момент двигателя
dM = dFxh, (5.30)
где h - плечо силы (расстояние до полюса зацепления), h =  /2;
/2;  - диаметр начальной окружности статора;
- диаметр начальной окружности статора;
= 2ez1. (5.31)
После подстановки в (5.30) выражений (5.26), (5.31) получим
 (5.32) Полный крутящий момент
(5.32) Полный крутящий момент
 (5.33)
(5.33)
После интегрирования получим следующие расчетные формулы для сил и крутящего момента:
Fx = PDt/2; (5.28а)
Fy = PDt/2  (5.29а)
(5.29а)
 (5.33а)
(5.33а)
Эпюры момента и сил, действующих в рабочих органах двигателя, представлены на рис. 5.12.
Необходимо обратить внимание на одно важное следствие, вытекающее из приведенного анализа действия радиальных сил [87]. Оказывается, как было отмечено ранее, составляющие сил  создают на роторе перекашивающий момент (момент пары сил Fy) в плоскости, проходящей через оси ротора и статора (см. рис. 5.12).
создают на роторе перекашивающий момент (момент пары сил Fy) в плоскости, проходящей через оси ротора и статора (см. рис. 5.12).
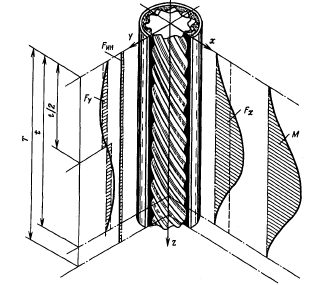
Рис.5.12.Эпюры крутящего момента М и радиальных сил  , действующих в РО гидродвигателя.
, действующих в РО гидродвигателя.
Перекашивающий момент приводит к нарушению пространственной ориентации (перекосу) ротора, искажению расчетной геометрии и появлению в рабочей паре дополнительных зазоров и натягов, а также является источником вибрации.
Таким образом, в одношаговом ВГМ вектор элементарных радиальных гидравлических сил изменяется как по направлению, так и по значению в зависимости от координаты сечения. Образующийся при этом на длине шага ротора спиральный "веер" элементарных гидравлических сил можно привести к главному вектору F  = Fx и главному моменту М
= Fx и главному моменту М  системы. Описанная совокупность силы Fr и пары сил М„ известна в теоретической механике как динамический винт и к одной равнодействующей не приводится.
системы. Описанная совокупность силы Fr и пары сил М„ известна в теоретической механике как динамический винт и к одной равнодействующей не приводится.
В ВГМ с центроидным зацеплением зависимость (5.33а) приобретает вид
 (5.35)
(5.35)
Кроме того, согласно общей теории гидромашин [60, 111] крутящий момент объемного гидродвигателя
М = PV/2  . (5.36)
. (5.36)
Для винтового гидродвигателя (см. § 4.4)
V = z2ST. (5.37)
В центроидном механизме с учетом (4.90) точное выражение крутящего момента приобретает вид
 (5.38)
(5.38)
В частном случае ВГМ с однозаходным ротором (i= 1 : 2)
 (5.38 a)
(5.38 a)
Выражения (5.35), (5.36) можно представить как [87]
 (5.39)
(5.39)
где М0 - удельный момент, представляющий собой крутящий момент ВГМ с единичными размерами (е, Т) и единичным перепадом давления.
Из анализа действия радиальных сил ВГМ (приближенное выражение)
М0 = z2(z2 - 1 + се). (5.40)
Из общей теории объемных гидромашин (точное выражение)
M0 = z2(z2-1 +  ce). (5.41)
ce). (5.41)
Сравнивая выражения удельных моментов ВГМ, полученные разными способами, можно сделать вывод, что они практически идентичны. Так, относительное расхождение при расчете удельных моментов для случая ВГМ с i = 9:10; се = 2 составляет всего 5 %. Это подтверждает правомерность проведенного анализа радиальных сил и принятых при вычислении длины площадки Lp допущений.
Крутящий момент можно представить в виде
 (5.42)
(5.42)
где Ст = t/dcp;  = DK / е.
= DK / е.
Выражение (5.42) наглядно иллюстрирует преимущество винтовых двигателей: в отличие от динамических гидромашин (турбобуров), у которых крутящий момент пропорционален пятой степени диаметра РО [41, 96], в ВГМ при прочих равных условиях М пропорционален третьей степени диаметра*. Это позволяет ВЗД развивать высокие крутящие моменты при относительно малых диаметральных габаритах.
Многошаговый двигатель
В многошаговом механизме (в практике бурения применяются именно такие РО, с числом шагов k  2) разделение полостей высокого и низкого давлений, а значит, и перепад давления осуществляется уже не на одной контактной линии, а на большем их числе [87]:
2) разделение полостей высокого и низкого давлений, а значит, и перепад давления осуществляется уже не на одной контактной линии, а на большем их числе [87]:
 . (5.43)
. (5.43)
В теории одновинтовых гидромашин [22] общепризнана гипотеза равномерного ступенчатого изменения давления при переходе через контактные линии по длине РО (с постоянным межвит-ковым перепадом давления)
Рк = Р/  . (5.44)
. (5.44)
В многошаговых РО гидравлические силы на каждом шаге ротора могут быть приведены к главному моменту только в ВГМ с однозаходным ротором [55].
В многошаговых многозаходных ВГМ вследствие специфики распределения жидкости по рабочим камерам [55] силовые факторы приобретают качественно иной характер, вызванный тем, что при постоянстве межвиткового перепада давления Рк значения элементарных гидравлических сил во всех сечениях не зависят от абсолютного давления жидкости в камере, а определяются межвитковым перепадом, геометрией зацепления и координатой сечения. При этом вектор элементарных гидравлических сил изменяет свое направление, создавая при этом перекашивающий момент, не на всей длине РО, а лишь на концах ротора (рис. 5.13). В средних же сечениях векторы элементарных гидравлических сил постоянны по направлению и составляют угол 90° с инерционной силой.
Эта закономерность вытекает из анализа действия элементарных гидравлических сил (рис. 5.14), являющихся равнодействующими сил давления жидкости (dfi) на грани замкнутого многоугольника  К2 К3
К2 К3  К5
К5  вершины которого расположены в точках касания профилей.
вершины которого расположены в точках касания профилей.
Рис 5 13. Эпюры гидравлических радиальных сил в многошаговом многозаходном ВЗД(i = 3:4; k =2) и эквивалентная расчетная схема
Элементарные гидравлические силы не дают проекции в направлении инерционной силы, если давление последовательно и равномерно изменяется от камеры к камере, так что перепад давления между ними остается постоянным, а это при Рк = idem имеет место в средних сечениях на длине l2 (см. рис. 5.13).
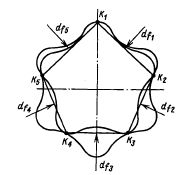 Рис.5.14. Схема действия гидравлических сил в поперечном сечении многошагового ВГМ(i=5:6)
Рис.5.14. Схема действия гидравлических сил в поперечном сечении многошагового ВГМ(i=5:6)
Таким образом, поперечные сечения многошаговых многоза-ходных ВГМ с точки зрения действия радиальных гидравлических сил можно условно классифицировать на три группы [55]:
1) крайние сечения, расположенные с обоих концов РО на длине l0 = T/2z1 во всех камерах которых находится жидкость одинакового (высокого или низкого) давления. В этих сечениях радиальные гидравлические силы не возникают;
2) центральные сечения на длине l2 = (k - 2 + 3/ z1)T, между камерами которых устанавливается одинаковый перепад давления. В этих сечениях радиальные гидравлические силы не создают перекашивающих проекций;
3) промежуточные сечения, расположенные с двух сторон на длине  , распределение давления жидкости в камерах
, распределение давления жидкости в камерах
которых не имеет закономерного характера (между одними камерами есть перепад давления, между другими - нет), что приводит к возникновению перекашивающих радиальных сил.
Поскольку Fr и Fn есть площади соответствующих эпюр элементарных гидравлических сил, то, учитывая вид этих эпюр и аппроксимируя их правильными трапециями (см. рис. 5.13), получаем
 (5.45)
(5.45)
где  - средние значения элементарных сил в центре эпюр (высота трапеций).
- средние значения элементарных сил в центре эпюр (высота трапеций).
Момент пары перекашивающих сил
Мп =  . (5.47)
. (5.47)
Учитывая, что l3 = T/z1 выражения (5.45)-(5.47) упрощаются до вида
 (5.48)
(5.48)
Выражения (5.48) можно представить в виде
 (5.49)
(5.49)
где  - безразмерные коэффициенты, зависящие от i,
- безразмерные коэффициенты, зависящие от i,  се.
се.
Значения данных коэффициентов для стандартного зацепления многозаходных ВГМ (с0 = 1,175; се = 2,175) приведены в табл. 5.3.
Таблица 5.3
| Безразмерные коэффи- | Число заходов ротора | ||||||||
| циенты | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |

| 0,244 | 0,292 | 0,324 | 0,346 | 0,363 | 0,377 | 0,388 | 0,397 | 0,405 |

| 0,058 | 0,122 | 0,190 | 0,261 | 0,334 | 0,408 | 0,483 | 0,559 | 0,635 |
 м м
| 0,018 | 0,028 | 0,035 | 0,041 | 0,045 | 0,048 | 0,051 | 0,053 | 0,055 |

Главный вектор радиальных гидравлических сил, приложенный в центре сечения РО, можно определить и непосредственно через крутящий момент гидродвигателя М:
 (5.50)
(5.50)
Главный вектор гидравлических сил отечественных ВЗД в режиме максимальной мощности, рассчитанный по формуле (5.50), имеет следующие значения:
Двигатель............... Д1-54 Д1-127 Д2-195 Д1-240
Fг, кН.................... .. 5-9 60-85 105-140 360-475
При определенной геометрии РО и перепаде давления Р главный вектор гидравлических сил ВГМ есть величина постоянная, не зависящая от числа шагов k, в то время как перекашивающие гидравлические силы Fn уменьшаются при увеличении числа шагов. При этом главный момент системы (перекашивающий момент) также не зависит от k, т.е. увеличение плеча пары сил при повышении числа шагов сопровождается пропорциональным уменьшением модуля силы Fn.
Оценку влияния перекашивающего момента в системе гидравлических сил ВГМ можно вести по углу перекоса
 (5.51)
(5.51)
В ВГМ с однозаходным ротором (i=1:2)
 (5.51а)
(5.51а)
Во многозаходных ВГМ
 при k=1
при k=1
 при
при  (5.516)
(5.516)
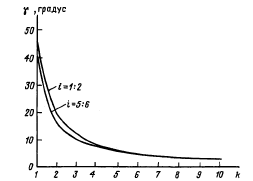
Рис. 5.15. Зависимость угла перекоса  от числа шагов k/РО
от числа шагов k/РО
Описанная особенность действия радиальных гидравлических сил, присущая ВГМ и заключающаяся в том, что главный вектор и главный момент системы независимо от числа шагов остаются постоянными, а действие перекашивающих сил локализовано на концах рабочей пары, подчеркивает преимущества монолитных многошаговых конструкций РО, поскольку в них не только снижаются контактные напряжения, но и уменьшается, а при k > 4 практически устраняется перекос ротора (рис. 5.15).
ЧАСТОТА ВРАЩЕНИЯ
Для объемных гидромашин при заданном расходе жидкости Q частота вращения вала (без учета объемных потерь)
п = Q/V. (5.52)
Для ВГМ с центроидным гипоциклоидальным зацеплением (5.52) можно преобразовать к виду
 (5.53)
(5.53)
где  _ удельная угловая скорость,
_ удельная угловая скорость,
 =1/М0. (5.54)
=1/М0. (5.54)
- безразмерный параметр ВГМ, выражающий скорость механизма с единичными размерами (е, T) и расходом жидкости [87].
Наибольшим значением обладают механизмы с однозаходным ротором, у которых
п = Q/4edT (5.53а)
Обратная зависимость удельных крутящих моментов и угловых скоростей (5.54) вытекает из принятого условия постоянства мощности гидродвигателя
М = М  = PQ. (5.55)
= PQ. (5.55)
Полученные выражения М0 и позволяют построить обобщенные зависимости крутящего момента и угловой скорости от кинематического отношения ВГМ при постоянном расходе и перепаде давлений.
На рис. 5.16 данные зависимости приведены для двух случаев: а - е = idem, Т = idem; б - DK = idem;  = idem. Из пред-
= idem. Из пред-
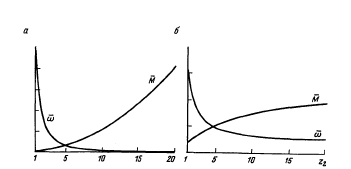
Рис. 5.16. Зависимость крутящего момента и угловой скорости от кинематического отношения
ставленных кривых видно, что при прочих равных условиях двигатели с однозаходным ротором (z2 = 1) развивают максимальную скорость и минимальный момент. Их применение оправдано, когда ставится задача создания высокооборотного двигателя.
По мере увеличения числа заходов возрастает крутящий момент и уменьшается угловая скорость. Объясняется это тем, что многозаходный ВГМ представляет собой соединение гидравлического двигателя и планетарного редуктора, передаточное отношение которого равно числу заходов ротора. Это важнейшее свойство многозаходных ВГМ предопределяет их преимущества при создании высокомоментного двигателя.
Наибольшее изменение функций относительных крутящих моментов и угловых скоростей наблюдается при увеличении числа зубьев ротора до z2 = 10, далее при DK = idem кривые  и
и  выполаживаются (см. рис. 5.16).
выполаживаются (см. рис. 5.16).
Таким образом, применение супермногозаходных РО (за исключением особых случаев) нецелесообразно, поскольку при  = idem это не приводит к заметному изменению характеристик гидромашины.
= idem это не приводит к заметному изменению характеристик гидромашины.
Крутящий момент и частота вращения идеального гидродвигателя не зависят от числа шагов РО и определяются соответственно перепадом давления и расходом жидкости.
В действительности вследствие гидромеханических и объемных потерь (см. § 5.7) крутящий момент М и частота вращения п ВЗД меньше своих идеальных значений Ми, пи:
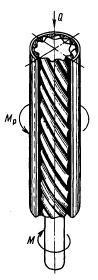
Рис. 5.17. Направление крутящих моментов (РО с левой нарезкой)
 (5.56)
(5.56)
 (5.57)
(5.57)
Направление крутящих моментов.Анализ рабочего процесса винтового двигателя позволяет сформулировать общее правило для определения направления крутящих моментов, создаваемых потоком жидкости (аналогичное "правилу буравчика" в электротехнике): для наблюдателя, смотрящего по потоку жидкости, момент от гидравлических сил на наружном элементе совпадает с направлением винтовой нарезки рабочих органов, а на внутреннем элементе -направлен в противоположную сторону (рис. 5.17).
Момент на элементе РО, связанном с бурильной колонной, принято называть реактивным моментом.
Чтобы реактивный момент Мр был направлен против часовой стрелки и не способствовал отвороту резьб бурильной колонны, в традиционной схеме ВЗД направление нарезки РО должно быть левым. В связи с этим во всех отечественных и зарубежных ВЗД рабочие органы имеют левое направление зубьев, выходной вал вращается по часовой стрелке (глядя сверху), а наддолотный переводник и другие детали выходного вала снабжены правой резьбой.
Дата добавления: 2018-02-18; просмотров: 1008; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!