КОНТАКТНЫЕ ЛИНИИ РАБОЧИХ ОРГАНОВ
Контактные линии образуются множеством точек касания винтовых поверхностей ротора и статора при их фиксированном положении. Проекция контактной линии на торцовую плоскость ху называется линией зацепления.
Контактные линии поверхностей РО винтовой гидромашины определяют:
протяженность и конфигурацию замкнутых камер (шлюзов); схему действия гидравлических сил; контактные нагрузки в паре;
потери (механические, объемные, гидравлические) в РО; пусковые свойства гидромашины.
В формировании контактных линий участвуют выступы и впадины* всех  зубьев ротора.
зубьев ротора.
Параметрические уравнения контактных линий.Пусть в исходном сечении (z = 0,  = 0) (рис. 4.30, а) РО левого направления точка касания выступа зуба ротора со впадиной статора К расположена на оси х (
= 0) (рис. 4.30, а) РО левого направления точка касания выступа зуба ротора со впадиной статора К расположена на оси х (  = 0), а точка касания впадины ротора Ко соответствует угловому параметру
= 0), а точка касания впадины ротора Ко соответствует угловому параметру  . Тогда в некотором текущем сечении z при повороте сечения статора и координатных осей ху на угол
. Тогда в некотором текущем сечении z при повороте сечения статора и координатных осей ху на угол  , (рис. 4.30, б) относительный угол поворота сечения ротора с учетом (4.57)
, (рис. 4.30, б) относительный угол поворота сечения ротора с учетом (4.57)
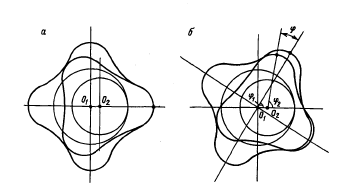
Рис. 4.30. Положение профилей в сечениях ВГМ:
а - исходное (  = 0); б - при повороте сечений (
= 0); б - при повороте сечений (  )
)
 (4.70)
(4.70)
В этом сечении точки касания рассматриваемых выступа и впадины ротора перейдут соответственно в положения К' и К0' с определенными угловыми координатами.
В теории ВГМ принято в пределах каждого зуба ротора разделять контактную линию на две составляющие: первую ветвь, образуемую точками касания поверхностей выступа зуба ротора, и вторую ветвь - по множеству точек касания впадины ротора.
Теоретическое объяснение появления двух ветвей контактной линии [94] состоит в двойном пересечении нормали в точке касания профилей центроид колес (за исключением особых точек  (см. § 5.1), в которых нормаль расположена по касательной к центроидам).
(см. § 5.1), в которых нормаль расположена по касательной к центроидам).
Координаты ветвей контактной линии можно определить, используя преобразования координат при повороте осей на угол  и уравнения связи угловых параметров
и уравнения связи угловых параметров  и
и  (см. § 4.11):
(см. § 4.11):

 (4.71)
(4.71)
где х', у' - координаты точки касания относительно текущего положения осей статора, зависящие от углового параметра точки.
Для перехода от общих уравнений (4.71) к уравнениям ветвей контактных линий учтем, что согласно (4.26) в идеальном ВГМ (  = 0) при повороте сечения статора на угол в зацеплении с выступом рассматриваемого зуба ротора находится точка профиля статора с угловым параметром
= 0) при повороте сечения статора на угол в зацеплении с выступом рассматриваемого зуба ротора находится точка профиля статора с угловым параметром  , а в зацеплении со впадиной ротора - точка, угловой параметр которой определяется из выражения
, а в зацеплении со впадиной ротора - точка, угловой параметр которой определяется из выражения
 (4.72)
(4.72)
Первая контактная линия.Подставляя в уравнение исходного профиля (4.18) значение  получаем координаты линии зацепления:
получаем координаты линии зацепления:
Где 
Вторая контактная линия.Ввиду невозможности решить уравнение (4.72) относительно  для внецентроидного зацепления, координаты линии зацепления в общем случае могут быть получены только численным расчетом на компьютере.
для внецентроидного зацепления, координаты линии зацепления в общем случае могут быть получены только численным расчетом на компьютере.
В центроидном механизме  , и координаты линии зацепления можно выразить аналитически
, и координаты линии зацепления можно выразить аналитически
 (4.74)
(4.74)
где 
Обе ветви представляют собой винтообразные пространственные кривые различного шага и кривизны (рис. 4.31). Первая ветвь проходит по всей длине винтового зуба ротора с шагом t и диаметром основной окружности, близким к среднему диаметру РО. Вторая ветвь - кривая с шагом t/z2 + 2  локализована в районе оси зацепления.
локализована в районе оси зацепления.
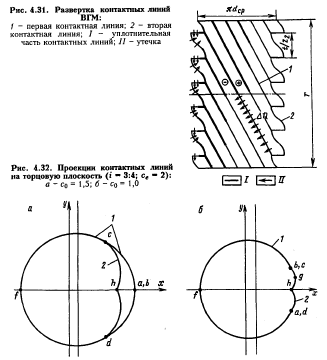
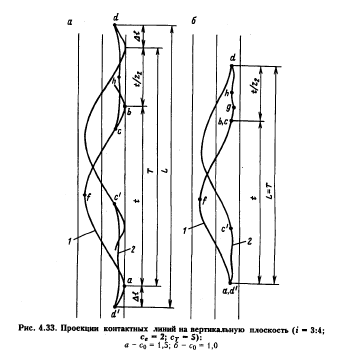
На рис. 4.32, 4.33 представлены проекции контактных линий на координатные плоскости.
На вертикальной плоскости xz показаны проекции двух первых и двух вторых контактных линий, образующих замкнутую рабочую камеру (шлюз) гидродвигателя. Шлюз образуется смежными первыми линиями контакта и крайними (на длине шага статора) вторыми линиями.
Поскольку именно вторая ветвь контактной линии обеспечивает замкнутость рабочих камер, ее называют линией замыкания [22, 94]. Слияние первой и второй контактных линий (см. рис. 4.33, а) происходит в точках с, d, с', d' с угловым параметром  , разделяющих профиль на выступ и впадину. В центроидном зацеплении (см. рис. 4.33, б) точки a и d' совпадают, т.е. разделение выступа и впадины происходит в "мертвой" точке (
, разделяющих профиль на выступ и впадину. В центроидном зацеплении (см. рис. 4.33, б) точки a и d' совпадают, т.е. разделение выступа и впадины происходит в "мертвой" точке (  = 0). Отсюда следует, что осевая протяженность L замкнутой камеры, заключенной между винтовыми поверхностями, в общем случае внецентроидного зацепления (см. рис. 4.33, а) превышает шаг статора [94]:
= 0). Отсюда следует, что осевая протяженность L замкнутой камеры, заключенной между винтовыми поверхностями, в общем случае внецентроидного зацепления (см. рис. 4.33, а) превышает шаг статора [94]:
L = Т + 2  (4.75)
(4.75)
где  - дополнительная длина, по концам камеры обусловленная углом запаздывания
- дополнительная длина, по концам камеры обусловленная углом запаздывания  цикла впадины ротора относительно "мертвых" точек. Запаздывание цикла означает, что в момент вхождения выступа зуба ротора во впадину статора (точка а) камера еще не становится герметичной.
цикла впадины ротора относительно "мертвых" точек. Запаздывание цикла означает, что в момент вхождения выступа зуба ротора во впадину статора (точка а) камера еще не становится герметичной.
 (4.76)
(4.76)
С учетом выражения  (см. § 5.1)
(см. § 5.1)
 ) (4.77)
) (4.77)
Из (4.77) следует, что протяженность шлюза (минимально необходимая длина РО) зависит от коэффициента внецентроидности (чем выше  ,тем больше
,тем больше  ).
).
Классическое условие L  Т справедливо только для гидромашин с центроидным зацеплением РО.
Т справедливо только для гидромашин с центроидным зацеплением РО.
В качестве примера ниже представлены значения общего относительного удлинения внецентроидных РО вследствие запаздывания цикла впадины ротора:
 (4.78)
(4.78)
Г яг, с„
рассчитанные для стандартных ВГМ (с0 = 1,175) различного кинематического отношения:
z2................ 2 3 4 5 6 7 8 9 10
 ,%........ 11,7 13,2 14,1 14,7 15,1 15,4 15,6 15,8 16,0
,%........ 11,7 13,2 14,1 14,7 15,1 15,4 15,6 15,8 16,0
Длина контактных линий.Сеть контактных линий РО формируется контактными линиями отдельных зубьев ротора, смещенных по оси z на расстояние t/z2.
Полная длина контактных линий РО минимально необходимой длины L
 (4.79)
(4.79)
где  - длина первой и второй контактных линий соответственно с шагами t и t/z2 + 2
- длина первой и второй контактных линий соответственно с шагами t и t/z2 + 2  ;
;  - дополнительная длина первой контактной линии вследствие превышения длины РО (L > > Т).
- дополнительная длина первой контактной линии вследствие превышения длины РО (L > > Т).
Точная длина ветвей контактных линий и значение  определяются по их координатам численным интегрированием.
определяются по их координатам численным интегрированием.
В практических расчетах при с0 < 1,25 с достаточной степенью точности можно:
пренебречь составляющей  ;
;
принять, что первая ветвь контактной линии - правильная винтовая линия с шагом t, диаметр основной окружности которой равен среднему диаметру РО: а = (DK - Зе)/2, а вторая ветвь - прямая длиной t/z2.
При таких допущениях полная длина контактных линий многошаговых РО определяется выражением
 (4.80)
(4.80)
При вращении ротора в процессе рабочего цикла ВЗД контактные линии совершают движение в направлении области низкого давления. Процесс движения первой контактной линии может быть интерпретирован физической моделью [22] - бегущей волной, длина которой равна шагу статора, а амплитуда - 2е. Скорость распространения волны w = z2Тп характеризует скорость перемещения контактной линии вдоль статора. Введение в теорию одновинтовых гидромашин физической модели облегчает проведение теоретического анализа рабочего процесса, в частности, при исследовании распределения давления в шлюзах, неравномерности крутящего момента гидродвигателя и др. (см. гл. 5).
Площадь проекции контактных линий..Поскольку замкнутость рабочих камер создает вторая ветвь зацепления, то площадь проекции контактных линий  ,определяющая осевую гидравлическую силу ВЗД, равна площади, заключенной внутри замкнутой кривой hdfch (см. рис. 4.32).
,определяющая осевую гидравлическую силу ВЗД, равна площади, заключенной внутри замкнутой кривой hdfch (см. рис. 4.32).
Точное выражение  для идеального гипоциклоидального ВГМ приведено в [55].
для идеального гипоциклоидального ВГМ приведено в [55].
В центроидном зацеплении
 (4.81)
(4.81)
В РО с однозаходным ротором (  ) [22]
) [22]
 (4.82)
(4.82)
В практических расчетах многозаходных гидромашин можно принять, что проекция контактных линий есть окружность среднего диаметра РО:
Дата добавления: 2018-02-18; просмотров: 617; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!