НЕРАВНОМЕРНОСТЬ УГЛОВОЙ СКОРОСТИ И КРУТЯЩЕГО МОМЕНТА
Рабочий процесс ВЗД, подобно другим объемным гидромашинам, сопровождается колебаниями угловой скорости и крутящего момента. Но в отличие от поршневых гидромашин крутильные колебания вала ВЗД обусловливаются не кинематикой рабочего органа (синусоидальным законом движения поршня), а изменением мгновенного расхода утечек в камерах двигателя.
Явление непостоянства утечки, впервые установленное в ходе исследований рабочего процесса одновинтового насоса [22], вызывается периодическим (циклическим) изменением числа контактных линий  , разделяющих области высокого и низкого давления, следствием чего является изменение межвиткового перепада давления Рк (5.44) и утечки через пару
, разделяющих области высокого и низкого давления, следствием чего является изменение межвиткового перепада давления Рк (5.44) и утечки через пару
 (5.58)
(5.58)
зависит от кинематического отношения, числа шагов РО и угла поворота ротора. За один оборот ротора максимальное число контактных линий mах разделяет вход и выход при вхождении выступа зуба ротора во впадину статора («мертвая» точка) в торцовом сечении обоймы ( z= 0). В промежуточных положениях ротора число контактных линий минимально [87]:
 (5.59)
(5.59)

С учетом кратности действия ВГМ частота пульсаций расхода утечек, сопровождающихся колебаниями давления на входе в гидродвигатель
f=z,z2n. (5.60)
Неравномерность вращения ВЗД (см. § 6.8), как это следует из (5.59), снижается с увеличением числа шагов и кинематического отношения, т.е. наиболее сильно крутильные колебания проявляются в одношаговых гидродвигателях. Если сравнивать многошаговые РО различного кинематического отношения, то более равномерно вращаются многозаходные пары. Так, при трехшаговом исполнении РО с кинематическими отношениями 9:10 и 1:2 число их шлюзов в промежуточных положениях соответственно составляет 20 и 4. Поэтому при изменении на единицу более чувствительны к перераспределению давления ВЗД с однозаходным ротором.
Пульсация межвитковых перепадов давления приводит также к колебаниям осевой силы гидромашины [22], что должно учитываться при динамических расчетах.
Неравномерность вращения ВЗД может привести к увеличению динамических нагрузок; стать источником крутильных колебаний долота и бурильной колонны и продольных колебаний в системах роторная группа ВЗД - долото - бурильная колонна, шпиндель - корпус ВЗД - бурильная колонна; снизить запас устойчивости гидродвигателя.
Вместе с тем пропорциональность частоты пульсаций давления и угловой скорости ВЗД можно использовать для идентификации режима работы гидродвигателя в процессе бурения скважины (см. § 9.5).
Для более точного описания процесса крутильных колебаний ВЗД необходимо проведение специальных экспериментальных исследований в лабораторных и промысловых условиях.
СИЛОВЫЕ ФАКТОРЫ
В процессе эксплуатации ВЗД его элементы (рабочие органы, соединение ротора со шпинделем, вал и опоры шпинделя, корпусные детали) подвержены действию различных силовых факторов гидравлического и механического происхождения. Действующие силы можно условно разделить на радиальные и осевые.
Радиальные силы, формирующие крутящий момент гидродвигателя, обусловливают смещение ротора вследствие деформации эластичной обкладки статора. Возникающие при этом контактные напряжения, как показывает опыт эксплуатации, во многом предопределяют ресурс РО. Кроме того, действие радиальных сил приводит к осевому перекосу ротора, что также неблагоприятно сказывается на работоспособности гидромашины.
Осевые силы определяют требования к выбору конструктивных элементов гидромашины (соединения ротора со шпинделем, опоры шпинделя и др.). Осевое усилие на корпусе двигателя определяет характер продольных нагрузок бурильной колонны, пространственную форму ее упругой линии, продольную устойчивость колонны и выбор местоположения на ней опорно-центри-рующих элементов. В связи с этим точный расчет осевых сил особенно важен при бурении наклонно направленных и горизонтальных скважин.
Радиальные и осевые силы зависят от геометрических параметров РО (i, сT, k) и режима работы ВЗД (Q, М).
Радиальные силы
Действие радиальных гидравлических сил в рабочих органах ВЗД одно- и многошаговой конструкций подробно разобрано при исследовании механизма образования крутящего момента (см. § 5.2).
В данном параграфе действие радиальных сил рассматривается с учетом всех факторов, возникающих в реальных условиях. При движении двух соприкасающихся тел (ротора и статора) необходимо учитывать не только гидравлические силы, но и реакции связей, выражающие условия контакта РО. Для ВГМ это положение особенно справедливо, поскольку здесь статор выполняет функцию радиальной опоры.
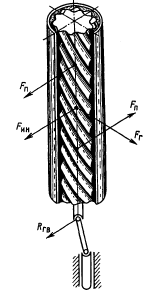
Рис. 5.18. Схема действия радиальных сил
На ротор, совершающий планетарное движение, в радиальном направлении действуют (рис. 5.18):
гидравлические силы, сводящиеся к главному вектору Fг, создающему крутящий момент, и паре перекашивающих сил FП (см. § 5.2);
поперечная составляющая силы тяжести ротора в жидкости
GP;
силы реакции связей в точках контакта поверхностей РО;
сила реакции связи с гибким валом RГB (перерезывающая сила), направленная к центру сечения перпендикулярно вектору Fг
Силы реакции связей в точках контакта с учетом предварительного натяга в паре распределены по линии контакта. В каждом поперечном сечении РО имеется  , точек контакта профилей. При движении ротора сила реакции связи
, точек контакта профилей. При движении ротора сила реакции связи  в точках контакта слагается (рис. 5.19) из нормальной реакции
в точках контакта слагается (рис. 5.19) из нормальной реакции  и перпендикулярной к ней силы трения
и перпендикулярной к ней силы трения
 (5.61)
(5.61)
где f - динамический коэффициент трения; i- номер точки контакта(i=1..,  Полная сила реакции
Полная сила реакции
 (5.62)
(5.62)
отклонена от нормали  на некоторый угол (см. рис. 5.19)
на некоторый угол (см. рис. 5.19)
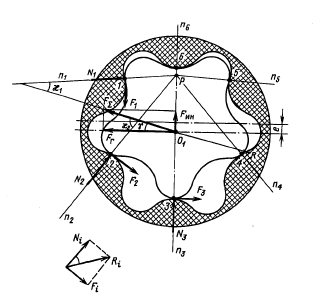
Рис. 5.19. Силы, действующие в характерном сечении ВГМ (i = 5:6):
Fr - гидравлическая сила; Fин - инерционная сила;  - полная реакция связи в точке контакта;
- полная реакция связи в точке контакта;  - нормальная реакция связи;
- нормальная реакция связи;  - тангенциальная реакция связи (сила трения); R - равнодействующая сила реакции связи (сила воздействия статора на ротор);
- тангенциальная реакция связи (сила трения); R - равнодействующая сила реакции связи (сила воздействия статора на ротор);  - угол давления;
- угол давления;  - угол отклонения;
- угол отклонения;  - нормали; Р - полюс зацепления; 1-6 - точки контакта РО
- нормали; Р - полюс зацепления; 1-6 - точки контакта РО
Нормальная реакция - не создает ни крутящего момента, ни момента сил сопротивления. Силы трения создают на роторе момент сил вредного сопротивления (механических потерь Мм).
При неподвижном роторе (Fтp = 0) нормальная реакция связи сохраняется из-за начальных нагрузок от натяга в паре. При движении ротора происходит перераспределение начальных нагрузок: на одной части контактной линии - увеличивается, на другой - уменьшается (или даже снимается при переходе контакта в зазор).
Если принять систему координат, связанную со статором, условно неподвижной (абсолютной), то основное уравнение движения ротора представляется в виде
 (5.63)
(5.63)
где  - сумма сил, действующих на ротор; а - ускорение ротора относительно абсолютной системы координат x1y1; т - масса ротора,
- сумма сил, действующих на ротор; а - ускорение ротора относительно абсолютной системы координат x1y1; т - масса ротора, 
Чтобы раскрыть рассмотренную выше, статически неопределимую систему сил, примем допущения: ротор - абсолютно твердое тело;
радиальное смещение ротора пренебрежимо мало по сравнению с эксцентриситетом;
реакция со стороны гибкого вала оказывает несущественное влияние на перекос ротора (центр перекоса расположен в середине РО).
Тогда уравнение движения (5.63) приводится к интегрированному на половине длины РО виду
 (5.64)
(5.64)
где  - равнодействующие силы соответственно нормальной реакции и трения;
- равнодействующие силы соответственно нормальной реакции и трения;  - центробежная сила инерции ротора,
- центробежная сила инерции ротора,
 (5.65)
(5.65)
Приведенные силы сосредоточены в центре рассматриваемых участков. Координаты точек приложения векторов: z = L/4; z =3L/4 (рис. 5.20).
Инерционная сила, в отличие от других сил, входящих в уравнение (5.64), имеет нефизическое происхождение (в том смысле, что она не уравновешена силой противодействия, т.е. не подчиняется III закону Ньютона) и вводится для удобства расчета с использованием методов статики (принцип Даламбера), а также для отыскания реакции связи. Поскольку контактные нагрузки в РО ВЗД определяются реакциями связей, этот прием используется в теории одновинтовых гидромашин при расчетах контактных напряжений.
При учете потерь в гидродвигателе главный вектор fгпропорционален индикаторному моменту Минд (см. § 5.7):
 (5.66)
(5.66)
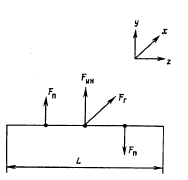
Рис. 5.20. Схема действия приведенных сил в РО ВЗД
Уравнение движения ротора (5.63) можно представить в виде
 (5.67)
(5.67)
где  - равнодействующая сила реакции связи на половине длины РО, которая уравновешивается векторной суммой гидравлических и инерционных сил, а также поперечной составляющей силы тяжести ротора. В теории одновинтовых гидромашин [94] под данной суммой
- равнодействующая сила реакции связи на половине длины РО, которая уравновешивается векторной суммой гидравлических и инерционных сил, а также поперечной составляющей силы тяжести ротора. В теории одновинтовых гидромашин [94] под данной суммой  , заключенной в скобки в (5.67), и понимается радиальная сила в РО.
, заключенной в скобки в (5.67), и понимается радиальная сила в РО.
Следует подчеркнуть, что равнодействующая сила реакции учитывает и составляющую от натяга в паре.
Уравнение (5.67) является основным при расчетах радиальных сил и контактных напряжений в РО.
Так как вектор  перпендикулярен к векторам
перпендикулярен к векторам  и
и  ,
,
уравнения динамики ротора в проекциях на координатные оси представляются следующим образом:
Rx=Fr/2; (5.68)

где
 (5.69)
(5.69)
Полная равнодействующая сила
 (5.70)
(5.70)
где  - угол отклонения вектора
- угол отклонения вектора  (см. рис. 5.19)
(см. рис. 5.19)
 (5.71)
(5.71)
В (5.71) и далее верхний знак относится к той половине РО, где  и
и  совпадают по направлению, а нижний - где они противоположны.
совпадают по направлению, а нижний - где они противоположны.
Сила реакции связи R распределена по контактным линиям по неизвестному закону, определить который аналитически ввиду сложности задачи не представляется возможным. Такая задача относится к классу пространственных контактных задач определения напряженного состояния прижатых упругих тел. В нашем случае одно из тел (ротор) может рассматриваться как абсолютно твердое, но при этом задача усложняется тем, что кривизна соприкасающихся тел изменяется по длине контактных линий.
В связи с этим переход от R к действующей нормальной нагрузке в точке контакта поверхностей может быть осуществлен только после принятия некоторых дополнительных допущений. Один из возможных подходов к решению данной задачи, при котором удельная нормальная нагрузка условно разделяется на две независимые составляющие: начальную от натяга в паре и дополнительную от силовых факторов, возникающую при движении ротора, используется при расчете контактных напряжений [43, 87], пересчете характеристик и оптимизации геометрических параметров ВЗД.
Осевые силы
Действие осевых сил распространяется как на систему вала ВЗД (ротор - гибкий вал - вал шпинделя - долото), так и на корпус гидродвигателя.
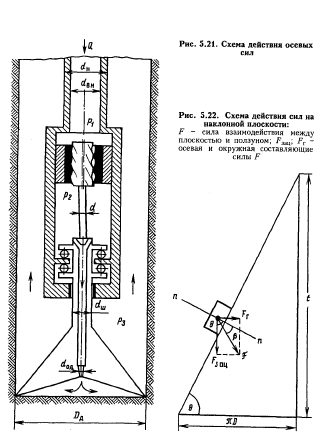
При расчете осевых сил примем типовую конструктивную схему забойного агрегата ВЗД - долото (рис. 5.21) с двухступенчатым перепадом давлений в РО ВЗД  и долоте
и долоте  (пренебрегая потерями давления в каналах двигателя, в частности в проточке вала шпинделя).
(пренебрегая потерями давления в каналах двигателя, в частности в проточке вала шпинделя).
Осевое усилие в системе вала, определяющее нагрузку в опорах шпинделя, зависит от распределения давления в гидродвигателе и долоте, осевой составляющей усилия в зацеплении рабочих органов, массы роторной группы (системы вала) тв и реакции забоя (осевой нагрузки на долото) G.
Для принятой конструктивной схемы осевые силы в системе вала суммируются (см. рис. 5.21), создавая нагрузку на опоре шпинделя
 (5.72)
(5.72)
 -осевая сила в рабочих органах, включающая гидравлическую составляющую Fp = PSK и составляющую усилий в зацеплении
-осевая сила в рабочих органах, включающая гидравлическую составляющую Fp = PSK и составляющую усилий в зацеплении  ;
;  - осевая гидравлическая сила от перепада давления на долоте; GB - продольная составляющая силы тяжести роторной группы в жидкости.
- осевая гидравлическая сила от перепада давления на долоте; GB - продольная составляющая силы тяжести роторной группы в жидкости.
Составляющие осевой силы определяются следующим образом:
 (5.73)
(5.73)
где SK, SШ - площади проекции соответственно контактных линий РО и вала шпинделя; S0Д - площадь промывочных отверстий долота.
В зависимости от соотношения сил, входящих в (5.72), F0может быть направлена как вверх (F0 < 0). так и вниз (F0 >0).
Составляющая усилий в зацеплении F3aцвозникает в результате разложения нормальных сил, распределенных по линии контакта зубьев [22, 94].
С физической точки зрения F3aцможно представить как осевую составляющую сил при скольжении ползуна-ротора по наклонной плоскости (развернутой винтовой поверхности статора) (рис. 5.22).
Если рассматривать РО как винтовую передачу [55], зависимость F3aцот внутреннего (индикаторного) крутящего момента Минд = = М + Мм (см. § 5.7) и среднего диаметра D имеет вид
 (5.74)
(5.74)
где  - угол подъема винтовой линии;
- угол подъема винтовой линии;  - угол трения,
- угол трения,
 (5.75)
(5.75)
Коэффициент трения f зависит как от фрикционных свойств пары, так и от геометрических параметров РО (натяг, число шагов, состояние поверхности).
Если шаг и средний диаметр винтовой передачи принять равными соответственно шагу и среднему диаметру ротора, то
 (5.76)
(5.76)
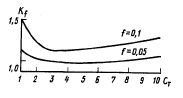
Рис. 5.23. Зависимость коэффициента  от
от 
Индикаторный момент при прочих равных условиях зависит от перепада давления и гидравлического к.п.д. ВЗД:
 (5.77)
(5.77)
Подставляя (5.75) и (5.77) в (5.74) и проведя преобразования, получаем
 (5.78)
(5.78)
где  - коэффициент, характеризующий влияние пространственной геометрии и фрикционных свойств РО [55],
- коэффициент, характеризующий влияние пространственной геометрии и фрикционных свойств РО [55],
 (5.79)
(5.79)
Данный коэффициент принимает минимальное значение ( = 1) в идеальном ВГМ при отсутствии трения (f=0).
Для любого коэффициента трения f существует форма винтовой поверхности (  ), обеспечивающая минимальное влияние
), обеспечивающая минимальное влияние
трения на уровень осевой составляющей сил в зацеплении (рис. 5.23). Для применяемых материалов пары ротор - статор (резина - сталь)  и
и 
Из графика (см. рис. 5.23) видно, что в рабочем диапазоне изменения параметра ( = 6-10) коэффициент незначительно отличается от 1 и, таким образом, трение не сильно влияет на осевую силу в зацеплении.
Поскольку  и компенсируют друг друга (
и компенсируют друг друга (  < 1; > 1) в практических расчетах их влиянием можно пренебречь, тогда осевая сила в РО
< 1; > 1) в практических расчетах их влиянием можно пренебречь, тогда осевая сила в РО
Fpo =P(SK + z2S). (5.80)
Если требуется выразить осевую силу как функцию крутящего момента М, то
 (5.80а)
(5.80а)
В большинстве случаев при расчетах осевых сил можно пренебречь силой тяжести роторной группы и перепадом давления в долоте (Р<< Р), принимая, что
Для ориентировочных расчетов можно использовать достаточно точные приближенные выражения площади проекции контактных линий и живого сечения (§ 4.3):
Осевые усилия в гибком вале  и вале шпинделя
и вале шпинделя  отличаются от нагрузки на опору шпинделя:
отличаются от нагрузки на опору шпинделя:
 (5.81)
(5.81)
 (5.82)
(5.82)
где SГВ - площадь проекции сечения гибкого вала, 
В расчетной схеме ВЗД (см. рис. 5.21) гибкий вал и вал шпинделя подвержены сжимающим напряжениям. При расчетах валов на прочность, в отличие от опор шпинделя, необходимо учитывать не только усилия от перепада давления в РО и долоте, но также и забойное давление жидкости р3.
Осевая сила в РО сопоставима с нагрузками на долото и оказывает существенное влияние на работоспособность гибкого вала и подшипников шпинделя.
В ПФ ВНИИБТ проведены экспериментальные исследования осевой силы в ВЗД [94, 107]. Ее измеряли с помощью тензометрической втулки, устанавливаемой между осевыми подшипниками и ниппельной гайкой шпинделя. Результаты экспериментов (рис. 5.24) подтверждают наличие составляющей Faau, поскольку фактическая осевая нагрузка больше расчетной гидравлической PSK. С увеличением натяга в паре осевая сила в РО возрастает.
Условия разгрузки осевой опоры ВЗД. Осевое усилие на опоре шпинделя отсутствует (F0 = 0), если нагрузка на долото
G* = PSK + F3АЦ + РД(SШ – SОД) + GB. (5.83)
Если пренебречь влиянием  РДто условие разгрузки упрощается до вида
РДто условие разгрузки упрощается до вида

Рис. 5.24. Зависимость осевой силы от перепада давления в двигателе Д1-54:
1-эксперемент(94, 107); 2-расчетная гидравлическая сила
G* = P(SK + z2S). (5.83а)
Значение G*, подсчитанное по (5.83а) для двигателя Д2-195 ( i= 9 : 10; е = 4,9 мм; DK = 135 мм), при перепаде давления 5 МПа составляет 140 кН.
Разгрузка осевой опоры обеспечивает максимальную стойкость шпинделя ВЗД, поэтому в инструкциях по эксплуатации ВЗД некоторых зарубежных компаний рекомендуется выбирать режимы бурения, обеспечивающие разгрузку опоры (см. § 8.3)*.
Осевое усилие на корпусе ВЗД FK складывается из усилия F0, передающегося через осевую опору шпинделя, и усилия FK* от гидравлических и механических сил на корпусе гидродвигателя:
FK = F0 + FK*. (5.84)
В технической литературе расчет осевых сил на корпусе ВЗД не рассматривается. Вместе с тем при проектировании отклоняющих компоновок для наклонно направленного и горизонтального бурения достоверное определение усилий на конце колонны бурильных труб может способствовать повышению точности расчетов.
Значение FK зависит от распределения давлений в гидродвигателе и долоте, давления жидкости на забое скважины р3, внутреннего dBH и наружного dH диаметров бурильной колонны.
Составляющая FK* в верхнем сечении корпуса ВЗД определяется следующим образом (см. рис. 5.22):
 (5.85)
(5.85)
где  - площади соответственно проекции и проходного канала бурильных труб:
- площади соответственно проекции и проходного канала бурильных труб:  ;
;  ; GK - продольная составляющая силы тяжести корпуса ВЗД в жидкости.
; GK - продольная составляющая силы тяжести корпуса ВЗД в жидкости.
Подставляя (5.80а) и (5.85) в (5.84), в результате получаем
FK = PS0 + РД(SН - Sод) –  + G (5.86)
+ G (5.86)
где  - площадь сечения (по металлу) бурильных труб,
- площадь сечения (по металлу) бурильных труб,
 - суммарная продольная составляющая силы тяжести ВЗД в жидкости,
- суммарная продольная составляющая силы тяжести ВЗД в жидкости,
 = GB + GK.
= GB + GK.
Забойное давление зависит от глубины скважины LCKB и потерь давления в кольцевом пространстве Ркп:

Отметим, что в отличие от F0 суммарное усилие на корпусе не зависит от F3АЦ (действие зубьев ротора на статор компенсируется обратным противодействием).
Если пренебречь перепадом давления в долоте и силой тяжести ВЗД, то
FK = PS0 - P3ST - G. (5.86a)
В этом случае продольное напряжение в нижнем сечении бурильной колонны определяется сочетанием трех сил: гидравлической от перепада давления в двигателе РS0; архимедовой р3Sт и осевой нагрузки на долото G.
Непостоянство перепада давления ВЗД осложняет управление нагрузкой на долото по показаниям индикатора веса (датчика натяжения неподвижной струны каната) (см. § 9.5) даже в случае бурения вертикальной скважины (при минимальном влиянии сил трения колонны о стенки скважины), поскольку при переходе от холостого режима (G = 0) к рабочему изменяется гидравлическая сила от перепада давления и тем самым нарушается первоначальный баланс продольных нагрузок в бурильной колонне, имевший место при "взвешивании" инструмента. Например, при бурении трубами 127x9 увеличение осевого усилия на корпусе ВЗД при изменении перепада давления с 2 до 5 МПа составляет 28 кН.
Условие снятия напряжения сжатия бурильной колонны. Колонна труб находится в растянутом состоянии при FK  0.
0.
Из (5.86а) следует, что максимальная осевая нагрузка на долото, при которой корпус гидродвигателя не испытывает сжимающих напряжений,
 (5.88)
(5.88)
Снятие сжимающих напряжений с корпуса ВЗД возможно лишь при бурении неглубоких интервалов.
Максимальная сжимающая нагрузка на долото  для случая бурения ВЗД с перепадом давления Р = 5 МПа при использовании колонны труб 127x9 и бурового раствора плотностью р = 1100 кг/м3 на различных глубинах бурения Lскв (без учета потерь в долоте и в затрубном пространстве) имеет следующие значения:
для случая бурения ВЗД с перепадом давления Р = 5 МПа при использовании колонны труб 127x9 и бурового раствора плотностью р = 1100 кг/м3 на различных глубинах бурения Lскв (без учета потерь в долоте и в затрубном пространстве) имеет следующие значения:
LСКВ, м..... 100 500 1000 1500
 , кН.... 43 29 11 -7
, кН.... 43 29 11 -7
Растягивающие усилия на корпусе гидродвигателя устраняют опасность продольного изгиба бурильной колонны и способствуют лучшему доведению осевых нагрузок к долоту при бурении наклонно направленных скважин, но практически это труднодостижимо.
Поскольку перепад давлений в ВЗД зависит от расхода жидкости и крутящего момента (нагрузки на долото), осевые усилия в системе вала и на корпусе гидродвигателя в общем случае можно рассматривать как некоторые функции параметров режима бурения: F0 = f(Q;G), FK = f(Q; G), определение которых и является задачей расчета.
Из выражения продольного усилия на корпусе гидродвигателя (5.86) вытекает важное для практики бурения следствие: осевая нагрузка на долото G может регулироваться двумя путями -механическим (изменением деформации колонны бурильных труб) и гидравлическим (изменением перепада давления в ВЗД, долоте и кольцевом пространстве скважины), т.е. при использовании гидравлического двигателя существуют два контура управления режимом бурения [147]: воздействие на верхний конец бурильной колонны (традиционный способ); изменение расхода жидкости (плавное регулирование G).
Дата добавления: 2018-02-18; просмотров: 766; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!