Высокоскоростной железнодорожный транспорт 6 страница
Требования к устройствам автоматики, телемеханики и связи на первой высокоскоростной магистрали диктовались новой идеологией организации движения поездов, принятой в Японии на линиях Син- кансэн и впоследствии ставшей во многом канонической для ВСМ: поезда постоянного формирования[XLV] осуществляют челночные рейсы между конечными станциями. При нормальном режиме движения по графику на промежуточных станциях какой- либо маневровой работы не производится, в силу этого, схемы их путевого развития (см. в главе 9), весьма просты: два главных, и, как правило, не более двух боковых приемо-отправочных путей, на которые принимаются поезда, имеющие остановку на данной станции. Главные пути этих станций предназначаются для безостановочного пропуска поездов и обычно не имеют пассажирских платформ.
В настоящее время во всех странах, имеющих ВСМ, по ним осуществляются только пассажирские перевозки, за исключением Франции, где в обращении находятся почтовые поезда, а также Германии и Италии, где, в силу особенностей концепции организации высокоскоростного движения, по участкам ВСМ пропускаются специальные грузовые поезда с максимальной скоростью до 160 км/ч. К вопросу о целесообразности осуществления по специализированным ВСМ перевозок ценных и скоропортящихся грузов неоднократно обращались ученые-экономисты, владельцы и руководители железнодорожных и экспедиторских компаний, однако до сих пор не сформулированы какие-либо заслуживающие внимание коммерческие предложения, поэтому специализированные высокоскоростные железные дороги остаются пассажирскими.
|
|
|
На большинстве ВСМ в расписание введены высокоскоростные поезда двух категорий, которые условно обозначим как «ускоренные» и «обычные». В Японии первые получили название «Хикари» («свет» или «вспышка молнии»), а вторые — «Кодама» («лесное эхо»). И те и другие поезда двигаются по перегонам с одинаковыми максимальными установленными скоростями. Но первые не имеют остановок вообще или останавливаются не более, чем на одной-двух станциях, поэтому проходят весь маршрут за меньшее время, чем вторые, которые останавливаются на большинстве промежуточных станций. В 1992 г. на ВСМ Японии в расписание были введены еще более быстрые поезда, не имеющие промежуточных остановок между конечными пунктами, «Но- зоми» (от японского «мечта»). Например, в настоящее время на линии Токио — Осака поезда «Хикари» и «Нозоми» в сумме составляют примерно три четверти от общего числа поездов, включенных в расписание. Такая модель эксплуатации позволяет удовлетворить запросы наибольшего числа пассажиров и привлечь максимальный пассажиропоток, но требует организации обгонов ускоренными поездами обычных, при малых интервалах попутного следования. Это предъявляет повышенные требования к надежности и быстродействию систем автоматической блокировки, электрической централизации на промежуточных станциях.
|
|
|
В 1964 г. при открытии первой ВСМ в Японии в ее расписание ежесуточно было включено 30 пар поездов, интервал попутного следования составлял около 15 мин; через 5 лет (1969 г.) их число возросло до 100 пар; в 2007 г. — до 150 пар (см. рис. 18.1). В настоящее время на отдельных линиях ВСМ в Японии в расписании предусмотрено до 180 пар поездов в сутки, в часы пик интервал попутного следования составляет около 3—5 мин.
Устройства СЦБ и связи для первой ВСМ Токио—Осака были разработаны, исходя из передовых достижений в области железнодорожной автоматики, телемеханики и связи, но не содержали каких-либо существенно новых технических решений, за исключением отказа от напольных светофоров: информация машинистам о свободности или занятости впередилежащих участков передавалась исключительно локомотивной сигнализацией. В 50-е годы прошлого века японские железнодорожные специалисты, помимо проведения собственных научных и опытно-конструкторских работ во всех областях железнодорожной техники, развернули очень большую работу в рамках Международной ассоциации железнодорожных конгрессов по выявлению и обобщению передовых достижений зарубежных стран. Идея автоблокировки без напольных светофоров с передачей информации машинисту только через локомотивные индикаторы была реализована на практике в США и СССР (на линии Москва — Владимир автоблокировка без напольных светофоров была введена в эксплуатацию в 1935 г.). В 50 — начале 60-х годов XX в. идея подобных систем автоблокировки активно обсуждалась среди специалистов.
|
|
|
Безопасное попутное следование поездов обеспечивалось на первой ВСМ в Японии автоматической системой управления движением поездов (АСУДП)[XLVI], включавшей перегонные, станционные и поездные устройства: многозначную автоматическую блокировку с рельсовыми цепями переменного тока, путевые индукторы и станционные кабельные шлейфы; частотную автоматическую локомотивную сигнализацию непрерывного действия с контролем скорости движения поезда, автостопом и автоматическим управлением тормозами. Машинист поезда, ориентируясь на расписание, осуществлял трогание поезда со станции, разгон до установленной скорости, ее корректировку по показаниям локомотивного светофора (индикатора), торможение поезда при следующей остановке на станции.
|
|
|
Устройства АСУДП обеспечивали контроль свободности блок-участков, готовности маршрутов движения по станционным путям и, исходя из этого, формировали частотный код локомотивной сигнализации (6 основных и 3 дополнительных значения), направляемый в рельсовые цепи навстречу движению поезда. Частотные сигналы расшифровывались поездными устройствами: на локомотивном индикаторе появлялись значения разрешенной скорости и, в случае ее превышения, происходило автоматическое включение тормозов, а после снижения скорости до разрешенного уровня — их последующий отпуск. Путевые индукторы обеспечивали безопасное
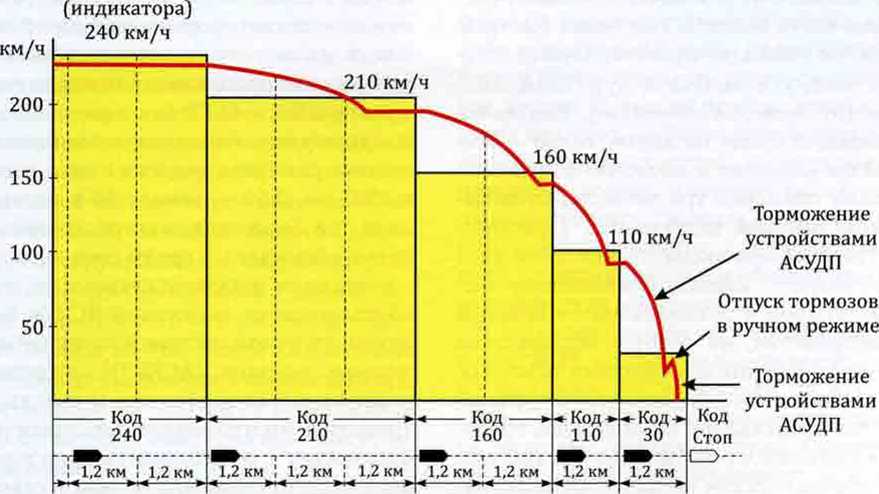
| Показание локомотивного светофора |
| Рис. 18.5. Тормозная диаграмма поезда Синкансэн при аналоговой АСУДП. Япония. 1964 г. |
торможение при нагоне впереди идущего поезда (рис. 18.5). Через кабельные шлейфы подавался сигнал остановки при неправильно заданном маршруте.
Аппаратура АСУДП не имела непосредственной связи с центральным диспетчерским постом. Диспетчер, управляя движением поездов и обеспечивая выполнение графика, взаимодействовал с машинистами поездов и дежурными по станциям. Машинисты поездов в ручном режиме, исходя из имеющейся информации, в том числе и полученной от АСУДП, осуществляли управление (за исключением случаев срабатывания автостопа, когда поезд останавливался вне зависимости от действий машиниста).
Важной функцией АСУДП являлось также обеспечение экстренной остановки или снижения скорости поездов при получении информации от датчиков, которые сигнализировали об аварийном выходе за габарит элементов подвижного состава, повреждениях искусственных сооружений и ограждения линии; от метеорологических постов (об ураганном ветре, ливне); от сейсмических датчиков и др., а также от сиг- 258 нальных приборов экстренной остановки поезда, которые на определенном расстоянии друг от друга размещены на опорах контактной сети и ими могут при необходимости воспользоваться путевые обходчики. Начиная с первых АСУДП и до современных систем управления движением поездов, снятие электрического напряжения с контактной сети (прекращение подачи электропитания путем его отключения или в случае аварии)является для устройств автоведения поезда сигналом экстренной остановки.
На первых линиях высокоскоростного движения диспетчер с Центрального диспетчерского поста имел возможность по проводной избирательной связи вызвать дежурного любой станции линии, дежурных группы станций или всех станций одновременно. В конце 60-х годов прошлого века на линии Синкансэн была устроена поездная радиосвязь диспетчера с машинистами и начальниками поездов. На центральном посту магистрали устройствами диспетчерского контроля отображалась поездная ситуация на всей линии (рис. 18.5). Прямое задание маршрутов следования поездов диспет-
| Руководитель движения — диспетчер |
| Диспетчерский контроль состояния промежуточных станций |
| Центральные устройства |
| Диспетчерская централизация станций Токио и Син-Осака, промежуточные станции — только на местном управлении |
| Син-Осака |
| Маршрутная релейная централизация на промежуточных станциях |
| Токио |

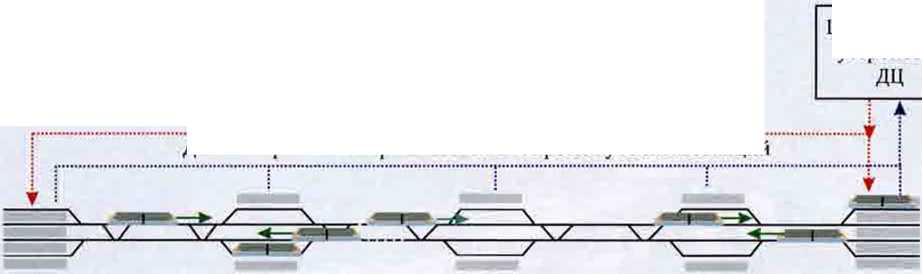
Автоматическая блокировка
и автоматизированная система управления
движением поездов на перегонах
Рис. 18.6. Упрощенная схема системы управления движением поездов на ВСМ Токио — Осака в первые годы эксплуатации (1964—1972)
чер мог осуществить только на конечных станциях Токио и Осака. Установка маршрутов на промежуточных станциях (проход по главному пути или прием на боковой путь с остановкой) осуществлялась каждым из дежурных индивидуально с помощью маршрутно-релейной централизации (МРЦ), в которую вводился код, переданный с приближающегося поезда, обозначавший его скоростную категорию: «Хикари» или «Кодама».
В 1972 г. в Японии на ВСМ Токио — Осака, продленной до станции Окаяма[47] (161 км), было завершено создание новой компьютерной системы управления движением поездов, получившей название COMTRAC[48][рис. 18.7), что стало важным шагом в развитии технических устройств автоматизированного управления на железнодорожном транспорте. Идеология и технические решения новой системы оказали большое влияние на дальнейшую разработку устройств управления ВСМ во всем мире.
Система COMTRAC функционировала совместно с модернизированной диспетчерской централизацией (ДЦ). Диспетчер получил возможность непосредственно с центрального поста задавать маршруты следования поездов на всех станциях магистрали. Связь между станционными, перегонными и центральными устройствами осуществлялась по оптоволоконым линиям. Все оперативное управление движением поездов столь напряженно работающей линии и всей ее инфраструктурой было сосредоточено функционально, технически, и территориально на центральном диспетчерском посту. Был реализован принцип «все управление сосредоточено в одном месте»[49]. В одном помещении размещены диспетчеры, отвечающие за все направления деятельности, работающие под началом главного диспетчера: поездной диспетчер, отвечающий за общую организацию движения и функционирование линии, в том числе в
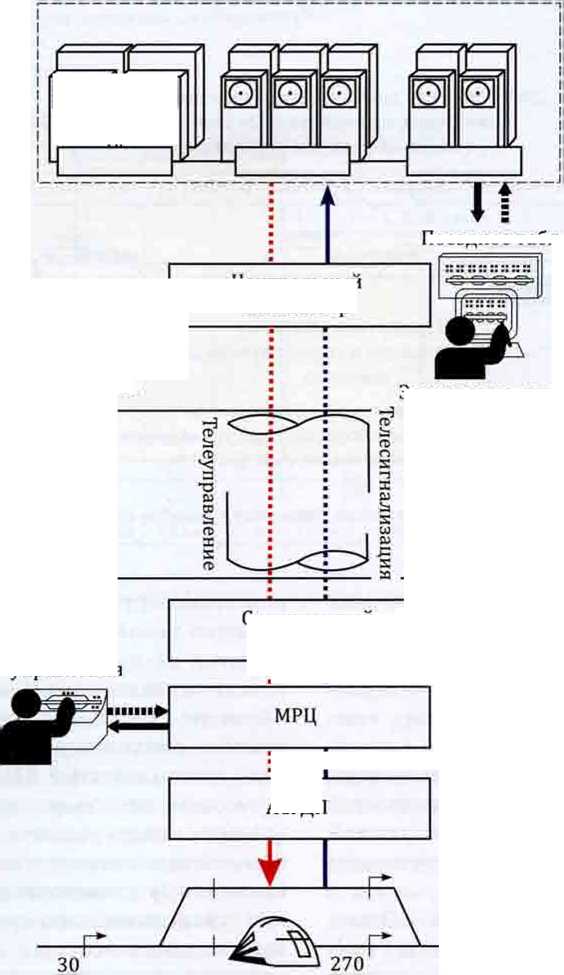
| Станция |
| ■ ■ |
| Оптико-волоконная линия связи |
| Рис. 18.7. Укрупненная структурная схема компьютерной системы управления движением поездов на линиях Синкансэн (COMTRAC): МРЦ — маршрутно-релейная централизация; АСУДП — автоматизированная система управления движением поездов. Япония. 1972 г. |
|
| ЦЕНТР диспетчерского управления |
| Пульт управления |
| Поездное табло |
| Электронно-лучевой дисплей управления |
| центральный компьютер |
| Станционный компьютер ■ ■ |
| АСУДП |
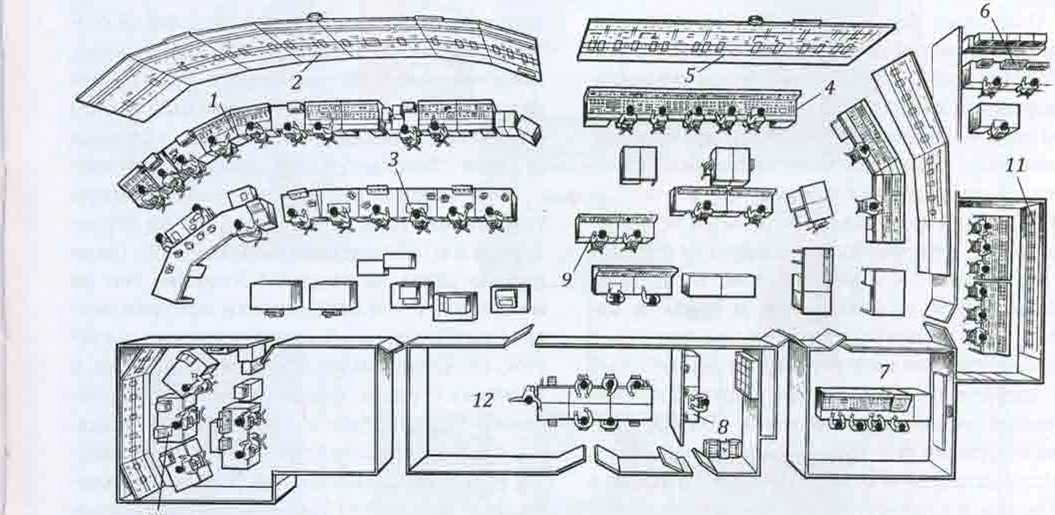
аварийных ситуациях; пассажирский диспетчер, отвечающий за обслуживание пассажиров, передачу информации о задержке поездов, а также за работу с пассажирами в чрезвычайных ситуациях (включая организацию автобусной развозки пассажиров опоздавших поездов, ночлега, питания и т.д.); диспетчер по подвижному составу; энергодиспетчер; диспетчеры по устройствам СЦБ и связи и др. (рис. 18.8, 18.9).
Эксплуатация COMTRAC обеспечивалась тремя совместно работающими электронно-вычислительными машинами, две из которых находились в действии, а одна — в горячем резерве. Получая от ДЦ информацию о поездной обстановке в режиме реального времени, системой COMTRAC при ориентировании на график движения поездов в конкретный день, составлялся и непрерывно корректировался план текущей
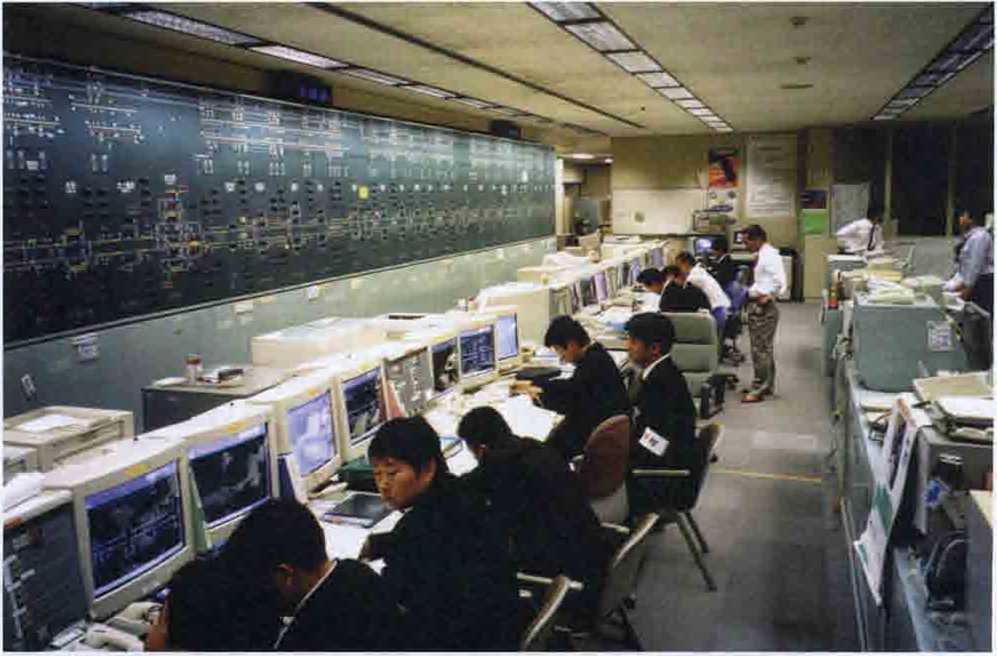
Рис. 18.8. Центр диспетчерского управления ВСМ «Токайдо» и «Санъё». 2003 г.
10
Рис. 18.9. Схема размещения зон управления диспетчерского центра ВСМ «Токайдо» и «Санъё»: 1 — поездной диспетчер; 2 — табло поездного диспетчера; 3 — диспетчер по подвижному составу; 4 — диспетчер электроснабжения; 5 — табло диспетчера электроснабжения; 6 — диспетчер по устройствам COMTRAC; 7 — диспетчер по средствам связи; 8 — дежурный отдела безопасности;
9 — диспетчер по устройствам СЦБ; 10 — пассажирский диспетчер; 11 — диспетчер по устройствам пути и искусственным сооружениям; 12 — зал для совещаний
работы, выявлялись возможные отклонения от графика, представлялись диспетчеру варианты действий по восстановлению движения по графику. В случае опоздания поездов формировалась и передавалась информация для персонала дороги и пассажиров.
Системой COMTRAC осуществлялся в автоматическом режиме набор всех поездных маршрутов с помощью устройств ДЦ, контролировалась правильность их установки, создавался график исполненного движения, на основе которого составлялся общий статистический отчет. С помощью информации, полученной из системы продажи билетов и резервирования мест в поездах, а также данных о работе различных структурных подразделений, отчет дополнялся необходимыми сведениями о коммерческой деятельности магистрали. В функции COMTRAC входили также учет состояния вагонного парка, подготовка и контроль выполнения плана формирования поездов, планирование и учет всех работ по обслуживанию и текущему ремонту технических устройств на линии.
Основные функции COMTRAC сохранились и в системе управления COSMOS[50], разработанной Восточной японской железнодорожной компанией для своих линий ВСМ «Тохоку», «Дзёэцу», «Нагано» и др. Функциональные схемы, во многом похожие на ту, что была положена в основу системы COSMOS, стали использоваться на ВСМ Франции, ФРГ, Италии, Испании и других стран.
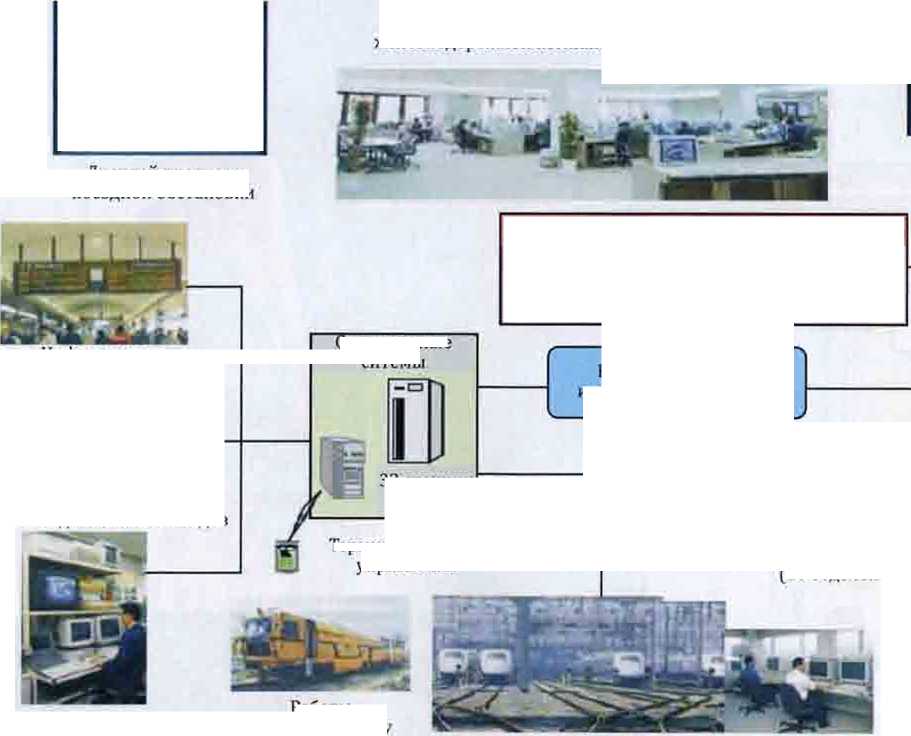
На рубеже XX и XXI столетий в системах автоматики, телемеханики и связи в целом, и на железнодорожном транспорте, в частности, начался переход от аналоговых к цифровым устройствам. Важной технической новинкой комплекса COSMOS стала цифровая система АСУДП[51], введенная в эксплуатацию в 2002 г. на ВСМ «Тохоку» в Японии в структуре интегрированной интеллектуальной системы управления Син- кансэн Восточной японской железнодорожной компании (рис. 18.10,18.11).
Применение цифровых способов передачи данных с высокой защищенностью от помех гарантировало необходимую надежность при возросших скоростях и интенсивности движения. Цифровая АСУДП обеспечивает более плавное и точное автоматическое торможение поездов при приближении к занятому участку (рис. 18.12). Было устранено присущее предыдущим устройствам аналоговой АСУДП многократное ступенчатое торможении поезда, приближающегося к занятому блок-участку, создававшее дискомфорт для пассажиров чередой резкого включения и выключения тормозов.
В настоящее время во многих странах продолжается развитие цифровых автоматизированных систем управления движением поездов на ВСМ на базе микропроцессорной техники с целью повышения их надежности, безопасности, оперативной гибкости, обеспечения новых эксплуатационных возможностей. Автоматизированные системы управления все более активно используются для сбора и анализа различных статистических показателей — технических, экономических, финансовых и др. Идеология создания автоматизированных систем управления движением поездов в разных странах сближается. Как правило, организуются единые интегрированные центры управления (рис. 18.13), близкие по структуре и алгоритму работы к тем, что были рассмотрены на примере Японии. Тем не менее, имеются особенности программного и приборного обеспечения данных систем, создаваемых разными компаниями и в разных странах. Вопрос о системах управления ВСМ вообще и управления поездами, диспетчерского управления, в частности, неминуемо выходит за рамки техникотехнологического процесса, организационной и экономической целесообразности. Он не может не рассматриваться в контексте безопасности, причем и на уровне национальной безопасности страны. Безусловно, в отличие от многих машин, конструкций и их элементов, например, устройств пути,
| Информационные терминалы |
| 6 отделений |
| Сектор персонала (10 отделений) |
| Управление подвижным составом и деповским оборудованием |
| Центр диспетчерского управления Синкансен Восточной японской железнодорожной компании |
| Работы по техническому обслуживанию |
| Табло поездного диспетчера |
| дисплеи прогноза |
| Автоматизированная система управления движением поездов |
| Информация для пассажиров |
| Дисплей контроля |
| Станционные ситемы |
| 33 станции 5 депо |
| Терминал ручного |
| El |
| Высокоскоростная |
| Инспекционный |
| Метеорологические станции |
| Техническое обслуживание устройств инфраструктуры (69 отделений) |
| Тяговые |
| Рис. 18.10. Структура интегрированной интеллектуальной системы управления Синкансэн Восточной японской железнодорожной компании |










Дата добавления: 2019-11-16; просмотров: 353; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!