Принцип силового замыкания соединений.
Силовое замыкание соединений следует осуществлять так, чтобы линия действия замыкающей силы проходила через зону (площадку) контакта сопрягаемых поверхностей. Тогда сила и возникающая реакция не образуют изгибающего момента, действующего на присоединяемую и базовые детали.Примерами выполнения этого принципа могут служить рассмотренное крепление зеркала: а также известный способ крепления тонкой линзы, опирающейся на три выступа оправы с помощью резьбового и упругого кольца, имеющего три выступа, которые расположены против выступов оправы посредством направляющей
Когда соединение передает усилие (кронштейны, зубчатые и фрикционные пары, муфты и т.п.) или требуется распределение сил (разгрузка зеркал, опор вращения и т.п.), следует руководствоваться принципами передачи сил (прямого и короткого пути, согласованных деформаций, компенсации силы, определенного распределения сил)
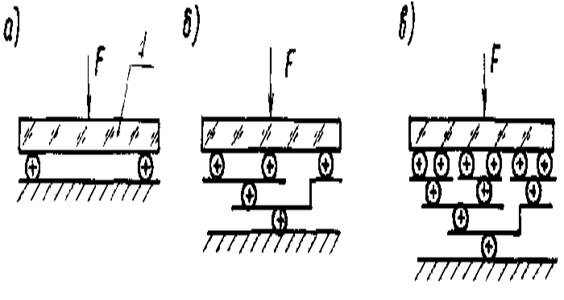 Рис.23
Рис.23
Рис.23 Например, на рис. 23 а, б. в показаны схемы минимизации деформации детали 1 под действием силы F (например, массы) при установке ее на несколько точек опоры
Конструкция разгрузки зеркала телескопа, позволяющая минимизировать деформации зеркала, благодаря равномерному распределению его массы на 18 опор.
Принцип ограничение смещения поворотов в соединении деталей.
Согласно этому принципу поверхности, ограничивающие смещение присоединяемой детали относительно базовой, следует располагать перпендикулярно к направлению ограничиваемого смещения. В этом случае более точно обеспечивается расположение рабочих элементов соединения относительно базовых, более благоприятным будет силовой режим в соединении (связанный с деформациями деталей, их износом), технологичней будут детали.На рис. 25, а, б изображены два варианта ограничения смещения штока 1 вдоль оси Y деталью 2. В первом варианте поверхность детали 2, ограничивающая смещение штока, расположена перпендикулярно, а во втором - под углом 90° -a к оси Y.
|
|
|
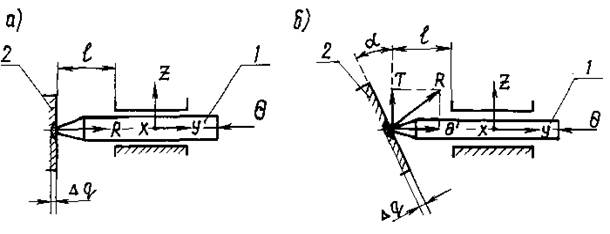 Рис.25 В результате для первого варианта погрешность расположения штока вдоль оси Y из-за погрешности Dq (например, шероховатости) детали 2 будет равна самой погрешности: DYD q >
Рис.25 В результате для первого варианта погрешность расположения штока вдоль оси Y из-за погрешности Dq (например, шероховатости) детали 2 будет равна самой погрешности: DYD q >
Dq; а во втором варианте она будет больше: DYD q > Dq/Cosa. Реакция (R) со стороны детали 2 на замыкающую силу Q в первом варианте равна (без учета сил трения) самой силе: R> Q; а во втором варианте она больше и равна R > Q/Cos a (т.е. больше будет износ деталей). Кроме этого, появляется составляющая сила T = Q tg a , которая может привести к изгибу и повороту (относительно оси Х) штока в зазоре направляющих.
При изготовлении, в первом варианте, необходимо обеспечить параметр l, в то время как во втором случае обеспечиваются параметры l и a.
|
|
|
Таким образом, на этом элементарном примере можно убедиться в том, что выполнение принципа ограничения смещения деталей в соединениях позволяет повысить точность, надежность и технологичность конструкции.
Следовательно, цилиндрические направляющие вращательного движения предпочтительней конических:
направляющие поступательного движения Т-образного типа лучше направляющих типа "ласточкин хвост"
Дата добавления: 2019-07-17; просмотров: 271; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!