АЛГОРИТМЫ ОПРЕДЕЛЕНИЯ ПФ СТРУКТУРНЫХ ГРУПП
Рассмотрим алгоритмы, которые легли в основу определения ПФ двухповодковых групп. Их графическая интерпретация позволит более наглядно представить решение поставленных задач.
Группа первого вида
На рис. 6.1 представлена схема группы первого вида.
Заданные параметры: ПФ внешних кинематических пар –  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ; длины звеньев lAB, lBC.
; длины звеньев lAB, lBC.
Так как каждое из звеньев группы содержит по одной точке, ПФ которых известны, необходимо определить угловые ПФ каждого звена:  ,
,  ,
,  ,
,  ,
,  ,
,  .
.
Графический способ определения ПФ0 заключается в том, что из точек А и С, положение которых известно, необходимо циркулем сделать засечки радиусами, соответственно, l AB и l CB, на пересечении получить точку B и таким образом получить положение осей звеньев АВ и СВ. Заметим, что засечку можно расположить и по другую сторону от линии АС, что будет соответствовать другому варианту сборки звеньев.
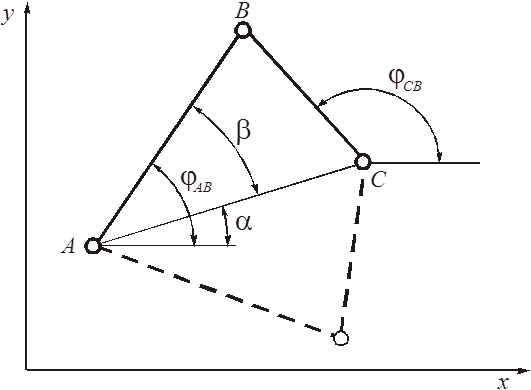
Рисунок 6.1 – Схема группы первого вида
Аналитическое определение ПФ0 может быть выполнено в такой последовательности:
 ;
;
b=cosb= 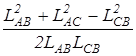 .
.
Если  >1, то сборка группы невозможна, то есть засечки радиусами lAB и lCB не пересекаются.
>1, то сборка группы невозможна, то есть засечки радиусами lAB и lCB не пересекаются.
b=-arctg(  )+
)+  .
.
Если X A<X C, то a=arctg  .
.
Если X A>X C, то a= p+arctg .
При X A=X C и Y A<YC a=  .
.
При X A=X C и YA>YC a=  .
.
jAB=a+jb.
Признак сборки jможет принимать значение +1 или –1, что определяется схемой группы, и чаще всего остаётся неизменным для всех положений исследуемого механизма. Исключение может быть в том случае, если при каком-либо значении ОК продольные оси звеньев АВ и СВ совпадают и оказывается необходимым изменить признак сборки.
|
|
|
XB=XA+LAB cosjAB;
YB=YA+LAB sinjAB.
Если XB>XC , j CB =arctg  .
.
Если XB<XC , j CB = p +arctg .
Если XB=X C и YB>YC, то jCB=90 °.
Если XB=X C и YB<YC, то jCB=270 °.
Для определения ПФ1 звеньев группы используем систему уравнений в виде
 (6.1)
(6.1)
Дифференцируя эти выражения по ОК, получим
 (6.2)
(6.2)
Решая систему уравнений (6.2), получим:
 ; (6.3)
; (6.3)
 . (6.4)
. (6.4)
Дифференцируя эти выражения ещё раз по ОК, получим:
 ; (6.5)
; (6.5)
 . (6.6)
. (6.6)
Группа второго вида
На рис. 6.2 представлена схема группы второго вида.
Рисунок 6.2 – Схема группы второго вида
Заданные параметры:
- ПФ точки А вращательной КП:  , , ,
, , ,  , ,
, ,  ;
;
- ПФ элементов направляющей, по которой перемещается ползун, если направляющая неподвижна, или камень, если направляющая движется:  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ;
;
- длина звена lAB;
- параметр h, определяющий положение шарнира В относительно направляющей.
Заметим, что величина h может быть как положительной, так и отрицательной в зависимости от положения точки В по одну или другую сторону от направляющей.
Следует определить угловые ПФ звена АВ:  , ,
, ,  .
.
|
|
|
Графическое определение ПФ0 заключается в том, что из точки А циркулем радиусом lAB нужно сделать засечку на прямой, отстоящей от направляющей на величину h.
Из рис. 6.2 видно, что эта задача имеет два решения, соответствующих разным вариантам сборки.
Аналитическое определение φАВ может быть выполнено в такой последовательности.
Решая систему уравнений:
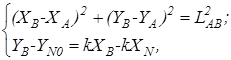 (6.7)
(6.7)
где k=tg j N;
YN0=YN +  ,
,
получим
XB=  , (6.8)
, (6.8)
где а=1+k2;
p=0,5(2XA–r1k+r2k);
q0=XA2–r1r2;
r1=LAB+kXN+YN0–YA;
r2=LAB+kXN–YN0+YA.
Признак сборки j, соответствующий различным положениями шатуна АВ (см. сплошную и штриховую линии на рис. 6.2), принимает значение +1 или –1 и чаще всего остаётся неизменным для любых положений механизма.
Он может измениться в случае, если шатун АВ проходит через положение, перпендикулярное направляющей ползуна.
Если b1=p2-(1+k2)q0<0, то сборка группы невозможна, то есть длина шатуна lAB оказывается меньше расстояния от точки А до линии, вдоль которой должен перемещаться шарнир В.
YB=kXB–kXN+YN0, (6.9)
kAB=tg =(YB-YA)/(XB-XA). (6.10)
Если XB>XA, то j AB =arctgkAB,
если XB<XA, то j AB = p +arctgkAB,
если XB=XA и YB>YA, то j AB= p/2,
если XB=XA и YB<YA, то j AB=- p/2.
Если j N=90 и k= ¥, то
|
|
|
 (6.11)
(6.11)
ПФ1 можно определить, дифференцируя по ОК выражения (6.7):
 (6.12)
(6.12)
где  ;
;
 .
.
Решая систему уравнений (6.12), получим:
 , (6.13)
, (6.13)
 . 6.14)
. 6.14)
Tогда  или
или  . (6.15)
. (6.15)
Если j N=90 ° и k= ¥, то, дифференцируя выражение (6.11), получим
 (6.16)
(6.16)
Для определения ПФ2 дифференцируем выражения (6.13)…(6.15):
 , (6.17)
, (6.17)
где  ,
,
 .
.
Если  , то
, то  , а
, а  следует определить по формуле
следует определить по формуле
 , (6.18)
, (6.18)
 , (6.19)
, (6.19)
 .
.
Группа третьего вида
На рис. 6.3 представлена схема группы третьего вида.
Заданные параметры – передаточные функции внешних кинематических пар:  ,
,  , ,
, ,  , , ,
, , ,  ,
,  ,
,  ,
,  ,
,  ,
,  , а также постоянные величины h1 и h2, определяющие положение осей КП А и В относительно оси внутренней поступательной пары.
, а также постоянные величины h1 и h2, определяющие положение осей КП А и В относительно оси внутренней поступательной пары.
Следует определить ПФ оси кулисы:  ,
,  ,
,  .
.
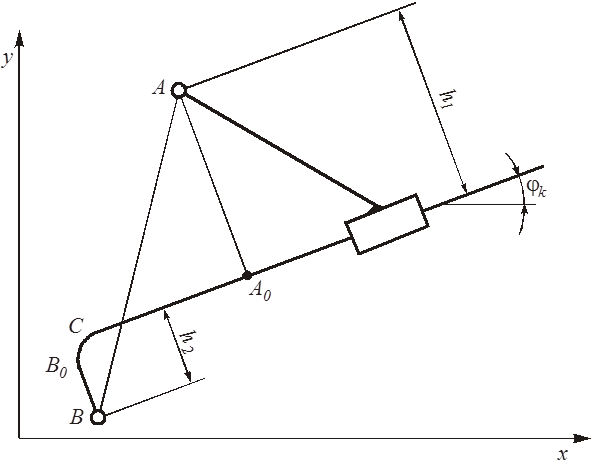
Рисунок 6.3 – Схема группы третьего вида
Рассмотрим графическую интерпретацию определения угловой ПФ0 звеньев, то есть углового положения кулисы.
С этой целью на рис. 6.4 изображены две окружности с центрами в точках А и В и радиусами h1 и h2.
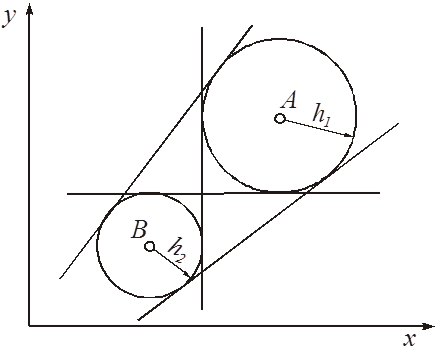
Рисунок 6 . 4 – Схемы возможных положений оси кулисы
Положение оси направляющей на рис. 6.3 соответствует положению общей касательной к этим окружностям. Из рис. 6.4 видно, что можно провести четыре такие касательные, то есть задача имеет четыре решения, соответствующие четырём различным комбинациям знаков h1 и h2.
|
|
|
Угол оси направляющей можно определить в такой последовательности (см. рис. 6.3):
 ; (6.20)
; (6.20)
 ;
;
 ; (6.21)
; (6.21)
 , если XА>XВ;
, если XА>XВ;
 , если XА<XВ;
, если XА<XВ;
 , если XА=XВ и YА>YВ; (6.22)
, если XА=XВ и YА>YВ; (6.22)
 , если XА=XВ и YА<YВ;
, если XА=XВ и YА<YВ;
 . (6.23)
. (6.23)
Для определения угловой ПФ1 оси направляющей дифференцируем выражения (6.20-6.23):
 ; (6.24)
; (6.24)
 ; (6.25)
; (6.25)
 ; (6.26)
; (6.26)
 . (6.27)
. (6.27)
После повторного дифференцирования полученных выражений находим угловые ПФ2:
 ,(6.28)
,(6.28)
 , (6.29)
, (6.29)
 , (6.30)
, (6.30)
 . (6.31)
. (6.31)
Группа четвертого вида
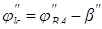
На рис.6.5 представлена схема группы четвертого вида.
Рисунок 6.5 – Схема группы четвертого вида
Заданными параметрами являются передаточные функции элементов направляющих n и m, по которым перемещаются ползуны:  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  , а также расстояния от оси внутренней КП до этих направляющих hn и hm.
, а также расстояния от оси внутренней КП до этих направляющих hn и hm.
Следует определить ПФ точки K. Из рис. 6.5 видно, что точка K лежит на пересечении прямых, одна из которых параллельна направляющей n и отстоит от неё на расстоянии hn, а вторая параллельна направляющей m и отстоит от неё на расстоянии hm. В этом случае также возможны четыре решения, соответствующие различным сочетаниям знаков hn и hm.
Аналитически координаты точки K можно определить следующим образом.
Уравнения осей направляющих:
где  ,
,  .
.
Тогда координаты точки K, отстоящей от направляющей на расстоянии hn и h m:
 , (6.32)
, (6.32)

Если  и
и  , то
, то
X K=X N+h n;
 . (6.33)
. (6.33)
Если  и
и  , то
, то
 ;
;
 . (6.34)
. (6.34)
В результате двукратного дифференцирования выражения (6.32) получим значение ПФ1 и ПФ2 точки K:
 (6.35)
(6.35)
 (6.36)
(6.36)
где  ,
, 
 , (6.37)
, (6.37)
 (6.38)
(6.38)
где  ;
;  ;
;
 ;
;  .
.
Группа пятого вида
На рис. 6.6 представлена схема группы пятого вида.
Заданными параметрами являются: линейные ПФ точки A ползуна хA, yA,  ,
,  ,
,  ,
,  , ПФ элементов направляющей n- n, по которой перемещается ползун хN, yN,
, ПФ элементов направляющей n- n, по которой перемещается ползун хN, yN,  ,
,  ,
,  ,
,  и ,
и ,  ,
,  , а также расстояние от оси шарнира A до внутренней направляющей h и угол a между направляющими двух ползунов.
, а также расстояние от оси шарнира A до внутренней направляющей h и угол a между направляющими двух ползунов.
Следует определить значение ПФ какой-либо точки второго звена группы, например точки K, лежащей на пересечении направляющих хK, yK,  ,
,  ,
,  ,
,  .
.
Заметим, что угловые ПФ1 и ПФ2 уже известны, так как они совпадают с соответствующими ПФ направляющей n- n.
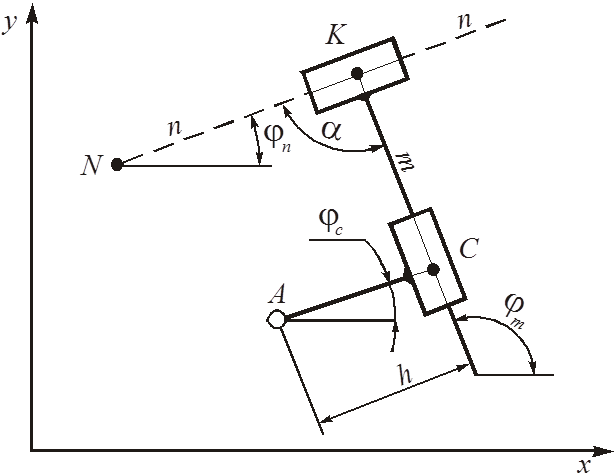
Рис унок 6 . 6 – Схема группы пятого вида
Графическая интерпретация определения ПФ0 точки K представлена на рисунке 6.7.
Здесь под углом a к направляющей n- n необходимо провести касательную к окружности радиусом h.
Как видно из рисунка 6.7, эта задача имеет два решения, соответствующие разным знакам параметра h.
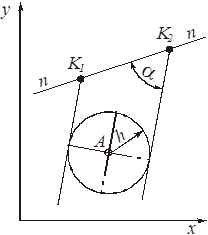
Рисунок 6.7 – Схема определения положения ползуна
Рассмотрим аналитическое определение координат точки K (см. рис. 6.6):
 (6.39)
(6.39)
 (6.40)
(6.40)
 ;
;
 ; (6.41)
; (6.41)
 , (6.42)
, (6.42)
 .
.
Если  или
или  , то
, то
 .
.
Если  или
или  , то
, то
При 
 .
.
Дважды дифференцируя выражения для определения ПФ, получаем выражение для определения линейных ПФ1 и ПФ2 точки К:
 ,
,
 ,
,
 ,
,
 ,
,
 ; (6.43)
; (6.43)
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 .
.
Дата добавления: 2018-10-26; просмотров: 280; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!