МЕТОДИКА ОПРЕДЕЛЕНИЯ ПФ0 СТРУКТУРНЫХ ГРУПП ВЫШЕ ВТОРОГО КЛАССА
Схемы некоторых структурных групп Ассура выше второго класса, то есть содержащих более двух звеньев, представлены на рисунках 1.1, 1.2 и 1.3.
Так как число таких структурных групп, отличающихся числом звеньев и сочетанием вращательных и поступательных КП, очень велико, актуальным является использование универсальной методики определения ПФ.
Возможные методы решения этой задачи рассмотрим на примере механизма, представленного на рис. 9.1 и используемого на металлургических предприятиях для отламывания чугунных чушек.

Рисунок 9.1 – Схема рычажного механизма чушколомателя
Если начальным звеном является кривошип 1, то остальные подвижные звенья механизма образуют четырёхзвенную структурную группу, представленную на рис. 9.2.

Рисунок 9.2 – Схема структурной группы
Рассмотрим метод, основанный на решении системы алгебраических уравнений. Для рассматриваемой структурной группы запишем шесть уравнений связей, содержащих шесть неизвестных (координаты точек В, С и Е):
 (9.1)
(9.1)
Корни этой системы уравнений (xB, yB, xC, yC, xE, yE) являются значениями ПФ0 внутренних КП структурной группы. Решение системы нелинейных уравнений может быть выполнено численным методом Ньютона.
Рассмотрим реализацию этого метода на более простом примере расчёта структурной группы 2-го класса 1-го вида (рис. 9.3).

Рисунок 9.3 – Схема двухзвенной структурной группы
Пусть известны координаты осей внешних КП xA, yA, xC, yC, длины звеньев lAB, lCB. Следует определить координаты внутренней кинематической пары xB, yB. Из рис. 9.3 видно, что точка В лежит на пересечении окружностей с центром в точке А радиусом lAB и с центром в точке С и радиусом lCB.
Таким образом, координаты точки В являются корнями системы квадратных уравнений
 (9.2)
(9.2)
Предположим, что известно некоторое приближённое значение корней системы  и
и  (первое приближение). Тогда точные значения корней системы можно представить в виде:
(первое приближение). Тогда точные значения корней системы можно представить в виде:
 ; (9.3)
; (9.3)
 ,
,
где 
 – поправки к приближённым значениям корней. Подставляя выражение (9.3) в левую часть уравнений системы (9.2), получим:
– поправки к приближённым значениям корней. Подставляя выражение (9.3) в левую часть уравнений системы (9.2), получим:
 (9.4)
(9.4)
Разложим левые части уравнений (9.4) в ряд Тейлора по степеням e x и e y, ограничиваясь только линейными членами:
 (9.5)
(9.5)
Эти выражения представим в виде:
 (9.6)
(9.6)
Тогда поправки  и являются корнями системы двух линейных уравнений, так что:
и являются корнями системы двух линейных уравнений, так что:
 (9.7)
(9.7)
где 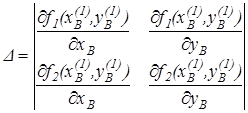 . (9.8)
. (9.8)
Рассмотрим реализацию этого метода на конкретном примере.
Пусть хА=1; yA=3, lAB=5; xC=8; yC=4; lBC=5.
Тогда уравнения (9.2) имеют вид
 (9.9)
(9.9)
В качестве первого приближения корней принимаем  3,5,
3,5,  7,5. Заметим, что точное значение корней хВ=4; yB=7. Определим значения величин, которые входят в выражение (9.5):
7,5. Заметим, что точное значение корней хВ=4; yB=7. Определим значения величин, которые входят в выражение (9.5):




 ,
,
тогда


Тогда второе приближённое значение корней составит:


Выполняя следующее приближение, получим практически точные значения искомых корней.
Последовательное нахождение корней системы уравнений вида (9.1) можно представить в матричной форме. Совокупность аргументов х1, х2, .... х n можно рассматривать как n-мерный вектор:

а совокупность функции f1, f2, .... f n как n-мерный вектор:
 .
.
Тогда ( p+1)-е приближённые значения корней  могут быть получены из выражения
могут быть получены из выражения
 ,
,
где  - приближённые значения корней ;
- приближённые значения корней ;
 - p-е приближения значений функции
- p-е приближения значений функции  ;
;
 - матрица, обратная матрице Якоби:
- матрица, обратная матрице Якоби:
 .
.
При реализации этого метода возникают трудности, связанные с отсеиванием корней в связи с многовариантностью сборки звеньев группы.
Следующий метод основан на том, что некоторые механизмы, содержащие группы выше второго класса, за счёт изменения начального звена можно преобразовать в механизм второго класса. Так, например, если в механизме, представленном на рис. 9.1, в качестве начального принять звено 5, то механизм преобразуется в механизм второго класса с формулой строения
(0-5)  (3-4)2 (1-2)1.
(3-4)2 (1-2)1.
Расчёт ПФ0 элементов этого механизма для различных положений звена 5 может быть выполнен по методике, изложенной в предыдущих разделах, с использованием стандартных процедур для групп Ассура второго класса. После этого необходимо получить значения ПФ0 элементов механизма для равноотстоящих положений кривошипа. Это может быть выполнено с помощью метода обратной интерполяции.
На рис. 9.4 представлена совокупность парных значений угла коромысла j5 (или x) и угла кривошипа j1 (или y), полученных для обращенного механизма 2‑го класса.

Рисунок 9.4 – Схема обратного интерполирования
Задача обратного интерполирования, то есть получения значений j5 (или х) для равноотстоящих значений j1 (или y) может быть решена с помощью интерполяционной формулы Лагранжа
 , (9.10)
, (9.10)
где xi, yi - координаты i-й узловой точки. Задавая y (или j1) с одинаковым шагом, можно получить искомые значения x (или j5). Однако при реализации этого метода возникают трудности, одна из которых заключается в определении крайних положений рассчитываемого звена. И, кроме того, не каждый механизм может быть преобразован в механизм второго класса.
Рассмотрим методику определения ПФ0, основанную на использовании стандартных процедур структурных групп второго класса пяти видов и идеях оптимизации, отличающуюся универсальным подходом к расчёту механизмов различной сложности и хорошей наглядностью, что особенно важно при выполнении учебных расчётов. Сущность методики рассмотрим на примере механизма третьего класса (см. рис. 9.1). Пусть необходимо определить положение звеньев группы для заданного положения кривошипа. С этой целью мысленно остановим точку А кривошипа, разрушим звено 5 и рассмотрим механизм, представленный на рис. 9.5.

Рисунок 9.5 – Схема фиктивного механизма
Если теперь звено 2 рассматривать как фиктивный кривошип, то звенья 3 и 4 образуют группу второго класса второго вида. Задаваясь углом j AB, определяющим положение фиктивного кривошипа, можно, используя стандартные процедуры для групп второго класса, определить положение звеньев 3 и 4, а затем координаты точки С и расстояние CD. При правильном значении угла j AB это расстояние должно равняться длине звена 5 - lCD. Поиск нужного значения j AB можно выполнить, используя идеи оптимизации. Для этого составляем целевую функцию в виде
 . (9.11)
. (9.11)
Варьируя j AB, следует добиться выполнения условия ½ CF ½ £ D, где D - наперед заданная малая величина, например D=0,1 мм. Поиск нужного значения j AB целесообразно выполнять методом половинного деления, сущность которого заключается в следующем. Сначала задаёмся величинами  , для которой CF1>0, и
, для которой CF1>0, и  , для которой CF2<0, определяем середину интервала
, для которой CF2<0, определяем середину интервала 
 и находим CF3. После этого в качестве нового интервала принимаем тот, на границах которого значения CF имеют разные знаки. Процесс определения оптимального значения j AB сходится достаточно быстро.
и находим CF3. После этого в качестве нового интервала принимаем тот, на границах которого значения CF имеют разные знаки. Процесс определения оптимального значения j AB сходится достаточно быстро.
Мысленно разрушив звено 4 рассчитываемого механизма (см. рис. 9.1), можно прийти к фиктивному механизму другой структуры, как это показано на рис. 9.6.

Рисунок 9.6 – Схема фиктивного механизма
В этом случае полученный механизм включает фиктивный кривошип 2 и структурную группу второго класса первого вида (звенья 3 и 5). При этом необходимо найти такое значение угла фиктивного кривошипа j AB, когда точка Е звена 3 оказывается на направляющей. В этом случае целевая функция имеет вид
 . (9.12)
. (9.12)
Два начальных значения угла j AB следует назначить так, чтобы точка Е находилась по разные стороны направляющей ползуна.
Мысленно разрушив звено 5, как это показано на рис. 9.5, в качестве начального звена фиктивного механизма можно принять ползун 4. Тогда фиктивный механизм включает структурную группу первого вида (звенья 3 и 2), а целевая функция имеет вид, представленный формулой (9.11).
Дата добавления: 2018-10-26; просмотров: 285; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!