Структура программы для определения ПФ
Механизма чушколомателя
Программа для определения передаточных функций механизма чушколомателя приведена в приложении К.
Отличие этой программы от приведенной в приложении Д заключается в том, что кроме получения компьютерной модели механизма она позволяет определить ПФ1 и ПФ2 его элементов. В связи с этим линейные и угловые координаты объявлены массивами, так что с помощью функции Graphik могут быть выведены графики ПФ0. Следующий фрагмент программы содержит коэффициенты квадратной матрицы А1[ k, r] и элементы вектора В1[ k] (формула (11.1)). Процедура Gauss возвращает значения ПФ1 для m положений механизма. Коэффициенты матрицы для определения ПФ2 такие же, как и для определения ПФ1, а элементы вектора В2[ k] сформированы на основании формул (11.6). Значения ПФ2 возвращает функция Gauss. Программа завершается тестированием передаточных функций и выводом графиков ПФ0, ПФ1, ПФ2 элементов механизма.
Алгоритмы и программы для определения ПФ механизмов выше второго класса
Пример 1. Рассмотрим определение передаточных функций элементов механизма, приведенного на рис. 13.1 и содержащего только вращательные КП.
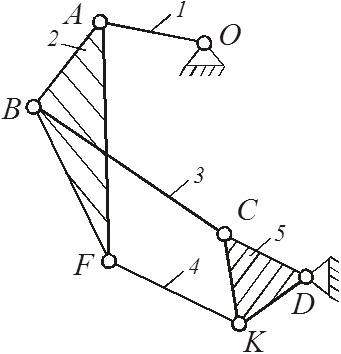
Рисунок.1 – Схема механизма
Этот механизм состоит из начального звена и структурной группы, включающей звенья 2, 3, 4 и 5. Фиктивный механизм с начальным звеном 2 получим, мысленно разрушив звено 4. Тогда, рассматривая начальное звено и структурную группу 1-го вида, включающую звенья 3 и 5, можно определить координаты точек K и F для фиксированного положения точки А кривошипа и различных значений угла jАВ фиктивного кривошипа 2. Для этого механизма целевая функция имеет вид
|
|
|
 . (13.1)
. (13.1)
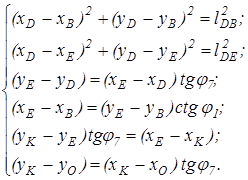
Так как структурная группа рассматриваемого механизма содержит 4 внутренние КП – В, F, C и K, следует записать 8 уравнений связей.
Они имеют вид:
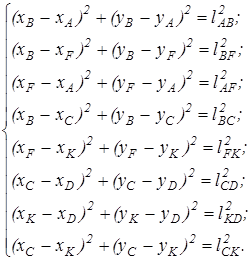 (13.2)
(13.2)
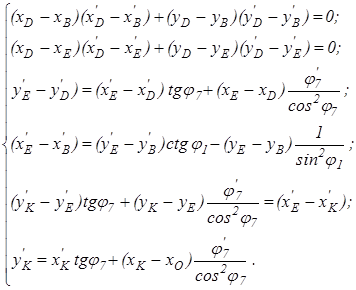
Для определения ПФ1 внутренних КП продифференцируем систему уравнений (13.2) и получим:
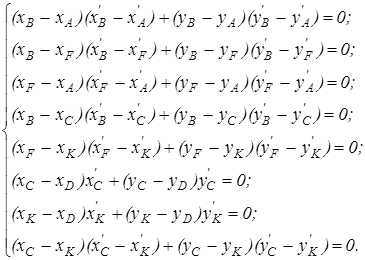 (13.3)
(13.3)
При этом было учтено, что  и
и  . Для определения коэффициентов матрицы в методе Гаусса в левой части уравнения (13.3) следует записать слагаемые, содержащие неизвестные
. Для определения коэффициентов матрицы в методе Гаусса в левой части уравнения (13.3) следует записать слагаемые, содержащие неизвестные  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  , а в правой части – известные слагаемые, содержащие
, а в правой части – известные слагаемые, содержащие  и
и  .
.
Тогда коэффициенты квадратной матрицы, содержащей восемь строк и восемь столбцов, имеют следующие значения:
A[1,1]=xB-xA; A[1,2]=yB-yA;
A[2,1]=xB-xF; A[2,2]=yB-yF; A[2,3]=xF-xB; A[2,4]=yF-yB;
A[3,3]=xF-xA; A[3,4]=yF-yA;
A[4,1]=xB-xC; A[4,2]=yB-yC; A[4,5]=xC-xB; A[4,6]=yC-yB;
A[5,3]=xF-xK; A[5,4]=yF-yK; A[5,7]=xK-xF; A[5,8]=yK-yF;
A[6,5]=xC-xD; A[6,6]=yC-yD;
A[7,7]=xK-xD; A[7,8]=yK-yD;
A[8,5]=xC-xK; A[8,6]=yC-yK; A[8,7]=xK-xC; A[8,8]=yK-yC.
Остальные коэффициенты матрицы равны нулю.
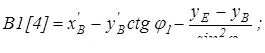
Свободные члены матрицы В1 системы уравнений имеют вид:
B1[1]=(xB-xA) + (yB-yA) ;
|
|
|
B1[2]=0;
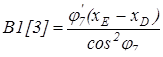
B1[3]= (xF-xA) + (yF-yA)  ;
;
B1[4]=0;
B1[5]=0;
B1[6]=0;
B1[7]=0;
B1[8]=0.
Для определения ПФ2 внутренних КП продифференцируем систему уравнений (13.3) и получим:
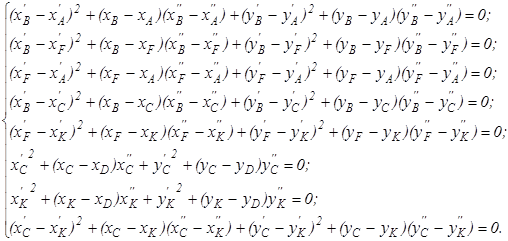 (13.4)
(13.4)
Далее систему (13.4) следует записать так, чтобы в левой части каждого уравнения оказались слагаемые, содержащие неизвестные  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  , а в правой части – слагаемые, содержащие известные
, а в правой части – слагаемые, содержащие известные  ,
,  .
.
Нетрудно заметить, что коэффициенты квадратной матрицы для определения ПФ2 такие же, как и для определения ПФ1, а свободные члены В2 системы уравнений имеют вид:
В2[1]=  ;
;
B2[2]=  ;
;
B2[3]= 
B2[4]= 
B2[5]= 
B2[6]= 
B2[7]= 
B2[8]= 
Листинг программы для определения ПФ рассматриваемого механизма приведен в приложении Л.
Пример 2. Определим передаточные функции механизма, содержащего кинематическую пару «кулиса-камень» и представленного на рис. 13.2.

Рисунок 13.2 – Схема механизма с кулисной парой
Этот механизм по классификации Ассура-Артоболевского является механизмом 3-го класса, так как содержит четырехзвенную структурную группу, включающую базовое звено 3 и звенья 2, 4 и 5. Листинг программы для определения ПФ элементов этого механизма приведен в приложении М.
Для определения ПФ0 элементов этого механизма, а именно хВ, yB и хС , в результате мысленного разрушения звена 4 получим фиктивный механизм с кривошипом 2 и группой Ассура второго вида, содержащей звенья 3 и 5.
|
|
|
Тогда целевая функция имеет вид
CF=YB-YD-(XB-XD)tgjBD.
Для определения ПФ1 ,  и следует записать три уравнения связей. Два из них имеют следующий вид:
и следует записать три уравнения связей. Два из них имеют следующий вид:
 ; (13.5)
; (13.5)
 . (13.6)
. (13.6)
Третье уравнение может быть записано следующим образом:
jBD=jBC-aB,
с учетом того, что для рассматриваемой схемы j BD<0, j BC<0 и a B>0.
Тогда  , или
, или  .
.
Учитывая, что  ,
,  и обозначив tg a B= k, окончательно получим
и обозначив tg a B= k, окончательно получим
(yD - yB)[(xC - xB) + k(yN -yB)]=(xD - xB)[(yN - yB) - k(xC - xB)]. (13.7)
Для определения неизвестных ПФ1 продифференцируем уравнения (13.5)…(13.7).
С учетом того, что  ,
,  и
и  , получим:
, получим:
 (13.8)
(13.8)
Систему уравнений записываем в форме, удобной для определения элементов квадратной матрицы:
 (13.9)
(13.9)
Тогда элементы квадратной матрицы для определения ПФ1 элементов структурной группы:
A[1,1]=xB-xA; A[1,2]=yB-yA; A[1,3]=0;
A[2,1]=xB-xС; A[2,2]=yB-yN; A[2,3]=xC-xB;
A[3,1]=yN-yD+k(2xB-xC-xD);
A[3,2]=xD-xC+k(2yB-yN-yD);
A[3,3]=yD-yB+k(xD-xB).
Правые части системы уравнений имеют вид:
B1[1]=  ;
;
B1[2]=0;
B1[3]=0.
Продифференцировав уравнения (13.9) ещё раз, получим систему линейных уравнений для определения ПФ2 элементов структурной группы, которая в результате преобразований принимает следующий вид:
|
|
|
 (13.10)
(13.10)
Замечаем, что элементы квадратной матрицы для определения ПФ2 элементов структурной группы такие же, как и для определения ПФ1.
Правые части системы уравнений имеют вид:
В2[1]= 
B2[2]= 
B2[3]=  .
.
Пример 3. Рассмотрим определение ПФ механизма, представленного на рис. 13.3.
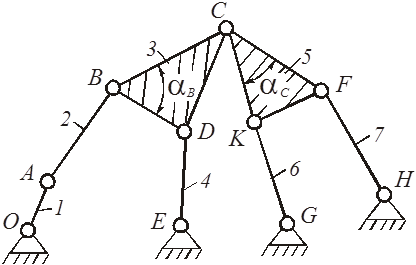
Рисунок 13.3 – Схема механизма
Листинг программы для расчета этого механизма приведен в приложении Н.
Рассматриваемый механизм содержит шестизвенную структурную группу, содержащую два базовых звена 3 и 5 и четыре поводка 2, 4, 6 и 7. Для построения компьютерной модели механизма мысленно разрушим звено 7 и рассмотрим фиктивный механизм с формулой строения
(0-2)®(3-4)1®(5-6)1 .
Используя стандартные процедуры As1 и Poi, определяем координаты точки F. Целевая функция имеет вид
 .
.
Так как рассматриваемая структурная группа имеет пять внутренних КП, можно записать десять уравнений связей вида
 и т.д.
и т.д.
Для определения линейных ПФ1 осей вращательных КП следует продифференцировать эти уравнения и получить десять уравнений вида
 и т.д.
и т.д.
При этом известными величинами являются ,  , а также
, а также  ,
,  ,
,  ,
,  ,
,  ,
,  . После переноса известных величин в правые части системы десяти уравнений получим коэффициенты квадратной матрицы:
. После переноса известных величин в правые части системы десяти уравнений получим коэффициенты квадратной матрицы:
A[1,1]=xA-xB; A[1,2]=yA-yB;
A[2,1]=xB-xC; A[2,2]=yA-yB; A[2,3]=xC-xB; A[2,4]=yC-yB;
A[3,1]=xB-xD; A[3,2]=yB-yD; A[3,5]=xD-xB; A[3,6]=yD-yB;
A[4,3]=xD-xC; A[4,4]=yD-yC; A[4,5]=xC-xD; A[4,6]=yC-yD;
A[5,5]=xD-xE; A[5,6]=yD-yE;
A[6,3]=xC-xF; A[6,4]=yC-yF; A[6,9]=xF-xC; A[6,10]=yF-yC;
A[7,3]=xC-xK; A[7,4]=yC-yK; A[7,7]=xK-xC; A[7,8]=yK-yC;
A[8,7]=xK-xF; A[8,8]=yK-yF; A[8,9]=xF-xK; A[8,10]=yF-yK;
A[9,7]=xK-xG; A[9,8]=yK-yG;
A[10,9]=xF-xH; A[10,10]=yF-yH.
Остальные коэффициенты равны нулю. Правая часть первого уравнения системы B1[1]=  . Остальные B1 равны нулю. С помощью процедуры Gauss определяем ,
. Остальные B1 равны нулю. С помощью процедуры Gauss определяем ,  , ,
, ,  ,
,  ,
,  ,
,  ,
,  , ,
, ,  .
.
В результате повторного дифференцирования получим систему десяти уравнений для определения ПФ2 в форме:
 ;
;
 .
.
При этом известными являются все ПФ1, а также и  , кроме того,
, кроме того,  ,
,  ,
,  ,
,  ,
,  ,
,  .
.
Тогда коэффициенты квадратной матрицы для определения ПФ2 такие же, как и для определения ПФ1.
Правые части уравнений имеют вид:
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 .
.
С помощью процедуры Gauss определяем ,  , ,
, ,  ,
,  ,
,  ,
,  ,
,  , ,
, ,  .
.
После этого в программе выполняется тестирование всех ПФ.
Пример 4. Рассмотрим методику определения передаточных функций кулисно-рычажного гиперболографа Вяткина, представленного на рис. 1.8. В соответствии с формулой строения этого механизма к начальному звену 1 параллельно присоединены две двухзвенные группы четвертого вида, а затем двухзвенная группа первого вида. Присоединенная затем четырехзвенная структурная группа показана на рис. 1.9. Листинг программы для расчета этого механизма приведен в приложении П.
Как видно из программы, расчет кривошипа, двух структурных групп четвертого вида и группы первого вида выполнен с помощью стандартных процедур, используемых для расчета механизмов второго класса. В результате определяем передаточные функции внешних КП: линейные ПФ точки В и угловые ПФ звена 7. После этого могут быть определены ПФ0 элементов четырехзвенной структурной группы.
В качестве кривошипа фиктивного механизма принимаем звено 11. Тогда присоединенной структурной группой является двухзвенная группа второго вида, включающая звенья 8 и 10.
Поскольку Ð DEK=90 °, то целевая функция имеет вид CF= sin( j OC- j DE). Так как задача по определению ПФ1 или ПФ2 элементов группы содержит по шесть неизвестных (по две линейные ПФ точек D, E и K), следует записать шесть уравнений связей
 (13.11)
(13.11)
Для определения ПФ1 продифференцируем эти уравнения:
 (13.12)
(13.12)
После преобразования этих уравнений получим коэффициенты матрицы для реализации методом Гаусса:
 A[1,1]=xD-xB; A[1,2]=yD-yB;
A[1,1]=xD-xB; A[1,2]=yD-yB;
A[2,1]=xD-xE; A[2,2]=yD-yE; A[2,3]=xE-xD; A[2,4]=yE-yD;
A[3,1]=tg j 7 ; A[3,2]=-1; A[3,3]=-tg j 7 ; A[3,4]=1;
A [4,3]=1; A [4,4]=- ctg j 1 ; (13.13)
A [5,3]=1; A [5,4]= tg j 7 ; A [5,5]=-1; A [5,6]=- tg j 7
A [6,5]= tg j 7 ; A [6,6]=-1.
Остальные коэффициенты равны нулю.
Правые части уравнений:
 ;
;
 ;
;
 ;
;
 ;
;
 .
.
Для определения ПФ2 продифференцируем уравнения (13.12) и получим
 (13.14)
(13.14)
После преобразования этих уравнений получим коэффициенты матрицы для определения ПФ2 элементов группы, аналогичные коэффициентам (13.13). При этом правые части уравнений имеют вид:
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
где  ;
;  ;
;  ;
;
 ;
;  ;
;  ;
;
 ;
;  ;
;  ;
;
 .
.
Дата добавления: 2018-10-26; просмотров: 326; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!