ПЕРЕДАТОЧНЫЕ ФУНКЦИИ НАЧАЛЬНЫХ ЗВЕНЬЕВ
Министерство образования и науки Украины
ДОНБАССКАЯ ГОСУДАРСТВЕННАЯ МАШИНОСТРОИТЕЛЬНАЯ АКАДЕМИЯ
Владимиров Э.А., Шоленинов В.Е.
ПЕРЕДАТОЧНЫЕ ФУНКЦИИ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к изучению дисциплин
"Теория механизмов и машин",
"Прикладная механика",
"Расчет и моделирование механических систем"
Утверждено
на заседании
Ученого совета ДГМА.
Протокол № 13 от
27.05.04г.
Краматорск 2004
ББК 34.41
УДК 621.01
В 57
Рецензенты:
Голопёров И.В., к.т.н., доц. кафедры электромеханических систем, УИПА
Подлесный С.В., к.т.н., доц., зав. кафедры технической механики, ДГМА
Владимиров Э.А., Шоленинов В.Е.
В 57 Передаточные функции плоских рычажных механизмов: Методические указания к изучению дисциплин "Теория механизмов и машин", "Прикладная механика", "Расчет и моделирование механических систем". - Краматорск: ДГМА, 2004. – 128 с.
|
|
|
ISBN 966-7851-38-9
Содержат методические указания по структурному анализу плоских рычажных механизмов и определению передаточных функций нулевого, первого и второго порядков элементов механизмов на базе использования аналитических и графических средств языка программирования Turbo Pascal. Методика может быть использована для расчета механизмов, содержащих в качестве начального звена кривошип или ползун и произвольное число структурных групп Ассура с любым числом звеньев. Большое внимание уделяется контролю правильности полученных результатов.
ББК 34.41
ISBN 966-7851-38-9 © Владимиров Э.А.,
Шоленинов В.Е., 2004
© ДГМА, 2004

СОДЕРЖАНИЕ
Введение................................................................................................... 5
1 Структурный анализ механизма.......................................................... 7
2 Передаточные функции начальных звеньев...................................... 18
3 Передаточные функции произвольной точки звена.......................... 21
|
|
|
4 Структура исходной программы для расчета передаточных
функций элементов механизма........................................................... 22
4.1 Начальное звено - кривошип.......................................................... 22
4.2 Начальное звено - ползун................................................................ 26
5 Контроль передаточных функций элементов механизма................. 26
5.1 Графический метод контроля ПФ0................................................. 26
5.2 Контроль ПФ0 с использованием AutoCad.................................... 30
5.3 Методика количественного контроля ПФ1 и ПФ2........................ 32
6 Алгоритмы определения ПФ структурных групп............................ 38
6.1 Группа первого вида....................................................................... 38
6.2 Группа второго вида....................................................................... 41
6.3 Группа третьего вида...................................................................... 45
6.4 Группа четвертого вида.................................................................. 48
6.5 Группа пятого вида......................................................................... 50
7 Процедуры для определения ПФ структурных групп..................... 54
8 Структура программы для расчета ПФ рычажных
механизмов второго класса............................................................... 56
9 Методика определения ПФ0 структурных групп выше
второго класса................................................................................... 60
10 Структура программы для моделирования механизма 3-го класса 70
|
|
|
11 Определение ПФ1 и ПФ2 элементов механизмов выше
второго класса................................................................................... 72
12 Структура программы для определения ПФ
механизма чушколомателя................................................................ 76
13 Алгоритмы и программы для определения ПФ механизмов
выше второго класса........................................................................ 78
Список рекомендуемой литературы..................................................... 89
Приложение А. Исходный файл расчета механизма
(начальное звено - кривошип).......................................................... 90
Приложение Б. Исходный файл расчета механизма
(начальное звено - ползун)................................................................ 93
Приложение В. Программа расчета механизма
качающегося конвейера.................................................................... 95
Приложение Г. Программа расчета
кулисно-рычажного параболографа Инвардса.............................. 99
Приложение Д. Программа для моделирования
механизма чушколомателя по схеме на рис. 9.5........................... 102
Приложение E. Функция для определения оптимального
значения варьируемого параметра................................................ 104
Приложение Ж. Программа для моделирования
механизма чушколомателя по схеме на рис. 9.6........................... 105
|
|
|
Приложение И. Программа для моделирования
механизма чушколомателя по схеме на рис. 9.5
(фиктивное начальное звено - ползун)............................................ 107
Приложение К. Программа для моделирования
механизма чушколомателя............................................................. 109
Приложение Л. Программа для определения ПФ
механизма, представленного на рис. 13.1 .................................... 113
Приложение М. Программа для определения ПФ
механизма с кулисной парой.......................................................... 118
Приложение Н. Программа для определения ПФ
механизма представленного на рис. 13.3...................................... 122
Приложение П. Программа для определения ПФ
кулисно-рычажного гиперболографа Вяткина............................. 124
ВВЕДЕНИЕ
Настоящие методические указания содержат рекомендации по определению передаточных функций плоских рычажных механизмов, в состав которых входят любые структурные группы, содержащие только низшие кинематические пары.
Кинематические пары (КП), образуемые звеньями группы между собой, называются внутренними, а с другими звеньями механизма – внешними. Они делятся на основные и дополнительные. Вид структурной группы определяется числом звеньев и сочетанием внутренних и внешних основных КП.
Механизм с числом степеней свободы W=1 содержит стойку, начальное звено, которому приписывается обобщенная координата (ОК), и произвольное число структурных групп различной сложности. Если начальным звеном является кривошип, то ему приписывается угловая обобщенная координата, измеряемая в радианах или градусах, а если ползун, то ему приписывается линейная ОК, измеряемая в миллиметрах.
Если с механизмом связать декартову систему координат, то положение любой точки какого-либо элемента механизма определяется двумя линейными координатами, а положение продольной оси звена – углом, отсчитываемым от положительного направления оси абсцисс против движения часовой стрелки. В общем случае линейные или угловые координаты элементов механизма изменяются с изменением ОК.
Передаточная функция нулевого порядка (ПФ0) какого-либо элемента механизма – это зависимость его линейной или угловой координаты от ОК.
Передаточная функция первого порядка (ПФ1) какого-либо элемента механизма – это первая производная от ПФ0 по ОК.
Передаточная функция второго порядка (ПФ2) – это вторая производная от ПФ0 по ОК.
Передаточные функции механизма необходимо знать для решения разнообразных задач, связанных с их расчетом. Это – решение дифференциального уравнения движения механизма, его кинематический анализ, а также силовой расчет, необходимый для получения исходных данных для расчета элементов механизма на прочность, жесткость и долговечность.
Единицы измерения ПФ приведены в таблице ниже:
| ОК | ПФ0 | ПФ1 | ПФ2 | |||
| х | j | 
| 
| 
| 
| |
| j 1, рад (… °) | мм | рад (… °) | мм | -- | мм | -- |
| х1 | 1/мм | 1/мм | 1/мм2 | |||
В основу определения ПФ элементов механизмов положен аналитический метод. Поскольку расчетные формулы весьма громоздкие, целесообразно использование вычислительной техники.
Настоящие методические указания ориентированы на использование языка программирования Turbo Pascal [1]. Причем большая часть программных материалов оформлена в виде стандартных процедур, используя которые пользователь может разработать программу для определения ПФ элементов механизма, содержащего любое количество структурных групп. При этом большое внимание уделяется графическому представлению результатов расчетов на экране дисплея, что существенно упрощает процесс отладки программы, а также контролю правильности полученных результатов.
Так как расчет ПФ выполняется по структурным группам, рассмотрим методику их определения.
СТРУКТУРНЫЙ АНАЛИЗ МЕХАНИЗМА
Основной задачей структурного анализа является расчленение механизма на структурные элементы и составление формулы его строения.
Методика структурного анализа плоских механизмов, звенья которых образуют как низшие, так и высшие КП, изложена в методическом пособии [2]. Ниже излагается методика расчленения на структурные группы механизмов, содержащих только низшие КП.
Рассмотрим строение структурных групп, которые находят применение в реальных механизмах.
Как известно, двухзвенные структурные группы делятся на пять видов в зависимости от сочетания вращательных и поступательных КП. Схемы структурных групп приведены в табл. 1.1. В таблице приведены схемы групп, учитывающие все возможные варианты их строения, а также их упрощенные аналоги, так как именно в таком виде они наиболее часто встречаются в механизмах.
В таблице приведены также условные обозначения видов структурных групп, содержащие три буквы, обозначающие вращательную (буква В) или поступательную (буква П) кинематические пары. При этом средняя буква обозначает внутреннюю КП, а две крайние – внешние основные.
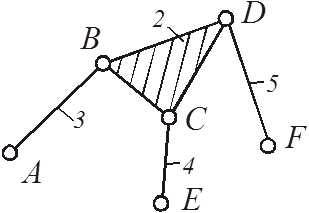
На рис. 1.1 представлены схемы четырехзвенных структурных групп с шестью вращательными КП. Группа, представленная на рис.1.1, а содержит одно базовое звено 2, образующее внутренние КП B, C и D с тремя звеньями 3, 4 и 5, которые, в свою очередь, образуют по одной внешней основной КП с другими звеньями механизма. Группа, представленная на рис. 1.1, б, содержит четыре звена, образующие замкнутый контур. Звенья этого контура образуют между собой внутренние КП, а два противоположных звена образуют две внешние основные КП. Заметим, что вместо любой одной или нескольких вращательных КП могут быть поступательные КП.
Таблица 1 . 1 – Двухзвенные структурные группы пяти видов
| Вид группы | Схема группы | Упрощенная схема группы | Условное обозначение группы |
| 1 |
| ВВВ | |
| 2 | 
| 
| ВВП |
| 3 | 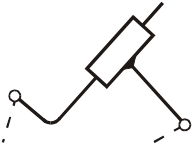
| 
| ВПВ |
| 4 | 
| 
| ПВП |
| 5 | 
| 
| ВПП |

|
|

Рисунок 1.1 – Схемы четырехзвенных структурных групп
На рис. 1.2 представлена схема шестизвенной структурной группы с девятью вращательными КП, вместо любой комбинации которых могут быть поступательные КП. Эта группа содержит два базовых звена 2 и 3, образующих между собой внутреннюю КП, и каждое из которых образует по две внутренние пары с четырьмя звеньями, которые, в свою очередь, образуют по одной внешней основной КП с другими звеньями механизма.

Рисунок 1.2 – Схема шестизвенной структурной группы
На рис. 1.3 представлена также шестизвенная структурная группа с двумя поступательными парами, входящая в состав механизма, носящего название кулисы Вальсхарта-Гейзингера.

Рисунок 1.3 – Схема шестизвенной структурной группы
с двумя поступательными КП
Расчленение механизма по методу “остановки звеньев” выполняется в такой последовательности.
Стойке присваиваем номер 0, а начальному звену, в качестве которого принимается кривошип, коромысло или кулиса, образующие со стойкой вращательную КП, или ползун, образующий со стойкой поступательную пару, присваиваем номер 1. Начальное звено, которому приписывается угловая или линейная обобщенная координата, образует со стойкой исходный механизм первого класса. Выделенное начальное звено мысленно превращаем в мнимую стойку. Отыскиваем два звена, образующие между собой низшую КП, каждое из которых образует низшую пару с действительной или мнимой стойкой. Такие два звена образуют структурную группу Ассура второго класса. Им присваиваем номера 2 и 3 и мысленно превращаем в мнимую стойку. Предыдущее действие повторяем для следующей пары звеньев, присваивая им очередные порядковые номера. Если из оставшихся звеньев не удается выделить двухзвенную структурную группу, следует отыскать комбинацию звеньев, соответствующую изображенной на рис. 1.1 или рис. 1.2, с учетом того, что некоторые из вращательных КП могут быть поступательными. Причем внешними основными КП звенья группы должны быть связаны с основной или мнимой стойкой.
Расчленение механизма выполняется до исчерпания всех звеньев, после чего записывается формула строения механизма, содержащая номера звеньев, образующих структурную группу, с указанием вида структурной группы.
Методику структурного анализа рассмотрим на примере механизма качающегося конвейера, представленного на рис. 1.4.

Рисунок 1.4 – Схема механизма качающегося конвейера
Неподвижному звену (стойке) присваиваем номер 0. В качестве начального звена принимаем кривошип, которому присваиваем номер 1. Кинематическую пару “кривошип-стойка” обозначаем О. Стойка 0 и кривошип 1 образуют исходный механизм, представленный на рис. 1.5, а.



а б в
a - исходный механизм;
б - группа Ассура 1-го вида;
в - группа Ассура 2-го вида
Рисунок 1.5 – Структурные элементы механизма качающегося конвейера
После выделения кривошипа 1 условно считаем его остановившимся, то есть превращаем в мнимую стойку. После этого находим два таких звена, которые образуют КП между собой и каждое из них – КП с действительной или мнимой стойкой. Такому признаку отвечает шатун АВ, которому присваиваем номер 2, и коромысло CD (номер 3). Действительно, между собой они образуют вращательную КП В, звено 2 – вращательную пару А с мнимой стойкой 1, а звено 3 – вращательную пару С с действительной стойкой. Внутренняя вращательная кинематическая пара В и две основные внешние А и С (также вращательные) определяют вид структурной группы. Сочетанию ВВВ кинематических пар соответствует группа Ассура первого вида (рис. 1.5, б). После выделения этой структурной группы ее звенья считаем мнимой стойкой.
Далее обнаруживаем, что шатун DE и ползун также отвечают признакам структурной группы. Они образуют вращательную пару Е между собой, шатун, которому присваиваем номер 4, вращательную пару D с мнимой стойкой, а ползун 5 – поступательную пару с действительной стойкой. Сочетанию кинематических пар ВВП соответствует группа Ассура второго вида (рис. 1.5, в). После исчерпания всех звеньев следует записать формулу строения механизма:
(0–1)®(2–3)1® (4–5)2.
Так как механизм содержит одно начальное звено, число его степеней свободы W=1.
Далее в таблице 1.2 представлен перечень кинематических пар.
На рис. 1.6 представлена структурная схема кулисно-рычажного параболографа Инвардса, у которого начальным звеном является ползун 1. Стойка 0 и ползун 1 образуют исходный механизм первого класса. Превратив ползун 1 в мнимую стойку, видим, что звенья АВ и СВ отвечают признакам структурной группы первого вида, так как образуют вращательную пару между собой, и каждое из них также вращательные со стойкой: звено СВ – с действительной, а звено АВ – с мнимой стойкой 1. Присваиваем им номера 2 и 3.
Таблица 1 . 2 – Перечень кинематических пар
| Номер пары | Обозначение | Номера звеньев | Вид пары | Класс пары |
| 1 | 0 | 0–1 | Одноподвижная вращательная | V |
| 2 | A | 1–2 | Одноподвижная вращательная | V |
| 3 | B | 2–3 | Одноподвижная вращательная | V |
| 4 | C | 3–0 | Одноподвижная вращательная | V |
| 5 | D | 3–4 | Одноподвижная вращательная | V |
| 6 | E | 4–5 | Одноподвижная вращательная | V |
| 7 | —— | 5–0 | Одноподвижная поступательная | V |

Рисунок 1.6 – Кулисно-рычажный параболограф Инвардса
Аналогичным условиям отвечают звенья AD и CD, образующие группу первого вида. Присваиваем им номера 4 и 5, а все четыре звена этих двух структурных групп превращаем в мнимую стойку.
После этого признакам структурной группы отвечают камень 6 и кулиса 7, образующие между собой поступательную пару и каждое из них – вращательную пару с мнимой стойкой. И, наконец, камни 8 и 9 образуют структурную группу четвертого вида. Рассмотренные структурные элементы представлены на рис. 1.7.



а б в

 д
д
г
а - исходный механизм;
б - группа Ассура 1-го вида;
в - группа Ассура 1-го вида;
г - группа Ассура 3-го вида;
д - группа Ассура 4-го вида
Рисунок 1.7 – Структурные элементы кулисно-рычажного механизма
Перечень кинематических пар представлен в табл. 1.3.
Таблица 1.3 - Перечень кинематических пар
| Номер пары | Обозначение | Номера звеньев | Вид пары | Класс пары |
| 1 | - | 0-1 | Одноподвижная поступательная | V |
| 2 | А | 1-2 | Одноподвижная вращательная | V |
| 3 | B | 2-3 | Одноподвижная вращательная | V |
| 4 | C | 0-3 | Одноподвижная вращательная | V |
| 5 | A | 1-4 | Одноподвижная вращательная | V |
| 6 | D | 4-5 | Одноподвижная вращательная | V |
| 7 | C | 0-5 | Одноподвижная вращательная | V |
| 8 | B | 2-7 | Одноподвижная вращательная | V |
| 9 | - | 6-7 | Одноподвижная поступательная | V |
| 10 | D | 4-6 | Одноподвижная вращательная | V |
| 11 | - | 1-8 | Одноподвижная поступательная | V |
| 12 | K | 8-9 | Одноподвижная вращательная | V |
| 13 | - | 7-9 | Одноподвижная поступательная | V |
Формула строения механизма:
 (2–3)1
(2–3)1



 (0–1) (6–7)3 (8–9)4 .
(0–1) (6–7)3 (8–9)4 .
(4–5) 1
Рассмотрим структурный анализ кулисно-рычажного гиперболографа Вяткина, представленного на рис. 1.8.

Рисунок 1.8 – Кулисно-рычажный гиперболограф Вяткина
В качестве начального звена принимаем кулису 1 и превращаем ее в мнимую стойку. Камень 2 и ползун 3, образующие между собой вращательную КП, отвечают признаку двухзвенной структурной группы, так как камень 2 образует поступательную пару с мнимой стойкой (кулисой 1), а ползун 3 – с действительной стойкой (направляющей n- n). Такому же признаку отвечают камень 4 и ползун 5, образующие также двухзвенную структурную группу. Обе эти группы являются группами четвертого вида. После превращения этих групп в мнимую стойку можно заметить, что звенья 6 и 7 отвечают признакам структурной группы, так как образуют вращательную КП между собой, а звено 7 – вращательную пару со стойкой и звено 6 с мнимой стойкой – ползуном 3. После превращения звеньев 6 и 7 в мнимую стойку видим, что из оставшихся звеньев 8, 9, 10 и 11 невозможно выделить два звена, отвечающих признаку двухзвенной группы Ассура, а вся совокупность этих звеньев соответствует признаку четырехзвенной структурной группы с базовым звеном 8 и звеньями 9, 10 и 11, образующими КП с мнимыми стойками, соответственно, 7, 11 и 5 звеньями. Схемы выделенных структурных элементов рассматриваемого механизма представлены на рис. 1.9.





Рисунок 1.9 – Структурные группы механизма
 Формула строения механизма
Формула строения механизма
ПЕРЕДАТОЧНЫЕ ФУНКЦИИ НАЧАЛЬНЫХ ЗВЕНЬЕВ
Любой плоский механизм можно представить как наслоение на исходный механизм, включающий стойку и начальное звено, различных структурных групп. Поэтому вначале рассмотрим определение ПФ элементов начальных звеньев, которым приписывается обобщенная координата.
Рассмотрим начальное звено, образующее со стойкой вращательную кинематическую пару, как это показано на рис. 2.1.

Рисунок 2.1 – Схема начального звена - кривошипа
Если звено 1 образует с другим звеном механизма вращательную пару в точке А и делает полный оборот, оно называется кривошипом, если неполный оборот – коромыслом. Если же звено 1 образует с другим звеном поступательную кинематическую пару, то оно называется кулисой. В дальнейшем такое начальное звено обобщенно будем называть кривошипом.
Его угловые ПФ1 и ПФ2:
 ,
,  . (2.1)
. (2.1)
Формулы для определения проекций передаточных функций точки А кривошипа:
ПФ0:  (2.2)
(2.2)
ПФ1:  (2.3)
(2.3)
ПФ2:  (2.4)
(2.4)
где XO, YO – координаты оси вращения кривошипа;
LOA – длина кривошипа.
На основании этих формул разработана стандартная процедура Kriv.
Описание этой процедуры:
Kriv ( X о, Y о, L оа, Fi оа g , q , jk , Mas : Real; {входные параметры}
var Xa , Ya , Xa _1, Ya _1, Xa _2, Ya _2 : Real), {возвращаемые
параметры}
где входные параметры:
Xо, Yо - координаты оси вращения кривошипа, мм;
Lоа - длина кривошипа, мм;
Fiоаg - угол, определяющий положение кривошипа, …°;
q - параметр, определяющий наличие изображения на экране;
jk - признак направления вращения кривошипа (если кривошип вращается против часовой стрелки, то jк=+1, если по часовой стрелке, то jк=-1);
Mas - масштаб графического изображения на экране;
возвращаемые параметры:
Xa, Ya, Xa_1, Ya_1, Xa_2, Ya_2 - значения передаточных функций нулевого, первого и второго порядка точки А кривошипа, мм.
При этом порядок производной определяется числом, стоящим после знака подчеркивания.
Начальное звено, образующее со стойкой поступательную пару, будем называть ползуном. Его схема представлена на рис. 2.2.

Рисунок 2.2 – Схема начального звена - ползуна
Здесь x1 – обобщенная координата.
Формулы для определения проекций передаточных функций точки А ползуна:
ПФ0:  (2.5)
(2.5)
ПФ1:  (2.6)
(2.6)
ПФ2:  (2.7)
(2.7)
На основании этих формул разработана стандартная процедура Polsun.
Описание этой процедуры:
Polsun ( Xa0, Ya0, Fing, X1, Lcc, Mas, q : Real; {входные параметры}
var Xa, Ya, Xa_1, Ya_1, Xa_2, Ya_2 : Real), {возвращаемые
параметры}
где входные параметры:
Xа0, Ya0 – координаты точки отсчета обобщенной координаты, мм;
Fing – угол направляющей ползуна, град;
X1 – значение обобщенной координаты;
Lcc – длина диагонали прямоугольника, изображающего на экране ползун;
возвращаемые параметры:
Xa, Ya, Xa_1, Ya_1, Xa_2, Ya_2 – значения передаточных функций нулевого, первого и второго порядка ползуна, мм.
Дата добавления: 2018-10-26; просмотров: 668; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!