Схема датчика скорости с функциональным преобразователем системы стабилизации скорости резания.
Сигнал пропорциональный скорости резания может быть получен с помощью диодного функционального преобразователя. С изменением диаметра обработки изменяется напряжение, поступающее на преобразователь со следящего потенциометра RP, открываются диодные ячейки VD1..VDn и при соответствующей настройке схемы ток через резистор RS изменяется по закону аппроксимированной гиперболы.
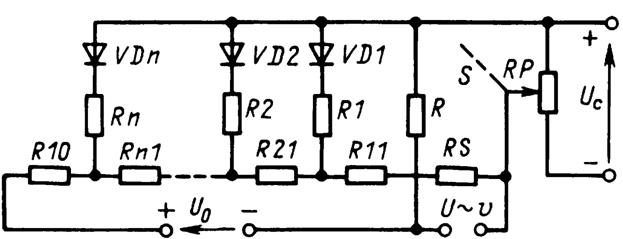
Схема индуктивного датчика скорости системы стабилизации скорости резания.
Сигнал пропорциональный скорости резания может быть получен с помощью датчика скорости с индуктивным датчиком. Устройство о.с. по скорости резания с индуктивным датчиком BL1 осуществляется при помощи профилирующей линейки. Профиль линейки строится на готовом станке методом подбора при помощи упорных винтов, таким образом стабилизируются нелинейности системы регулирования (усилителя, двигателя, датчика и т.д.).
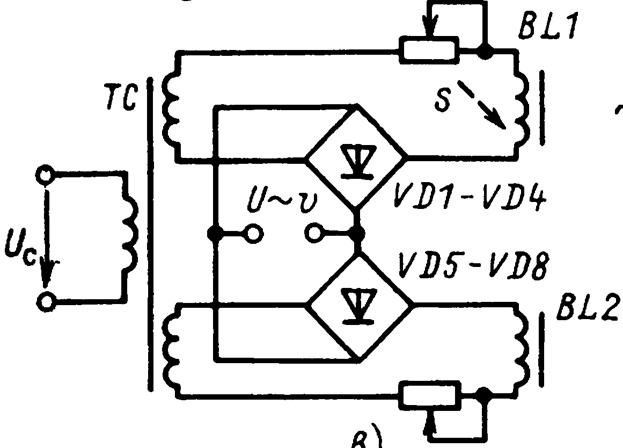
Схема датчика скорости с сельсином системы стабилизации скорости резания.
Сигнал пропорциональный скорости резания может быть получен с помощью датчика скорости с сельсином. Ротор сельсина BC связан с механизмом суппорта S и напряжение на выходе последнего пропорционально диаметру обработки. Через трансформатор TV это напряжение подаётся на обмотку возбуждения LBR тахогенератора BR привода шпинделя. Напряжение пропорциональное скорости резания снимают с обмотки якоря тахогенератора, является блоком перемножения.
|
|
|
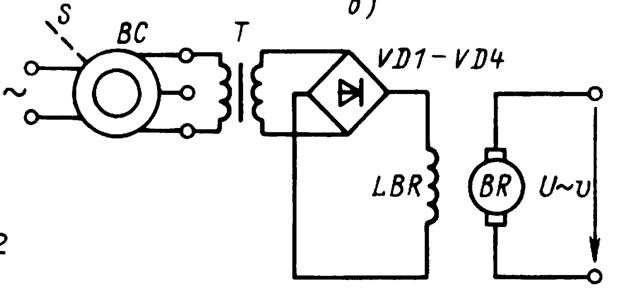
Схема системы стабилизации скорости резания шлифовального станка.
Построение систем стаб-ции скорости шлифования можт быть выполнена на базе АДКЗ и ТП частоты. Ротор АД и шлифовальный шпиндель составляет единое целое – электрошпиндель. В шлиф. станках стаб-я скорости шлифования осуществляется увеличением угловой скорости шпинделя wш по мере уменьшения диаметра шлиф. круга dk. В следствии размерного износа и его правок по з-ну v= (dk* wш)/2=const
Сигнал с технологческойо.с. может быть получен путем перемножения напр-я угл. скор. шпинделя и диам. шлиф. круга. Датчик диам. шлиф. круга. Вып-ся в виде сельсина, связанного соплом, через кот. подается в зону обработки с.о.ж.(смазывающая охлажд-я жид-ть).Конструкция такого датчика хоть и требует периодич. подстройки оператором, но предотвращает вкл-е привода на макс. частоту вращ. при наиб. диам. шлиф. круга., что может привести к его разрыву. Оператор, направляя с.о.ж. в зону шлиф-я одновременно с соплом поворачивает ротор сельсина. Сист. стаб. скор. шлиф., постр. с прим-ем такого датчика, построена на пяти ОУ, содержит блок Ах и ПЧ, сост. из управляемого выпр-ля Uм и автономного инвертора Uz. Блок упр-я преобр-ем постр. по принципу подчин. упр. С помощью П-рег. полож. DA1 производится задание скорости шлиф. Uз и вычитание из задающего напр-я сигнала Uv, проп-но скорости шлиф-я V и получаемого на на Ах на вход которого подаются напряжения, проп-е угл. скор. шпинделя Uтг и диаметру и диаметру шлиф-го круга Uд, выраб-го сельсином. Вырабатывая разностный сигнал Uу, поступ. на DA2 вместе с о.с. по угловой скорости ротроаUтг. Выделение модуля напр-я зад-я для РТ Uзтосущ-ся при помощи инвертора DA3 и вентилей VD5,VD6. Это связано с тем что ток в звене выпр-гонапр-я не меняет своего знака в то время как скольжение может свой знак изменять. Знач-е выпр-го тока вып-ет ПИ-рег. токкаDA4, на вход кот. пост. Сигналы отриц. о.с. по току Uт и кот. проп-ен модулю скольжения Uзт. РТ в стат. Режимах поддерживает зад-оезн-е тока статора нез-мо от частоты АИ Uz воздействием на СУ выпрямителем АИМ. На AUZ воздействует DA5, на входе которого суммируются сигнал скольжения с DA2 и сигн. пропорц. угл. скор. ротора Uтг. Стабилитроны VD1..VD4 ограничивают напр-я на соотв. усил-ях. При увел. нагр. на валу в пределах рабочего уч-ка его мех. хар-ки, частота Uz не изм-ся поскольку приращение сигнала скольжения компенсирует уменьшение сигнала угл. скорости на DA5.
|
|
|
Дата добавления: 2018-08-06; просмотров: 377; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!