Конструкция реактивного шагового двигателя.
Примен-ся в станках, координатографах и др. уст-вах с ЧПУ. ШД поворачивает свой вал на определенный угол при подаче на его обмотки импульса из СУ. Реактивный ШД сост. из ротора и статора, набр. из пластин. Рот. и стат. имеют зубцы.
Зубцы статора каждого наконечн. смещен. относит. зубцов предыдущ. полюсн. наконечника на 1/3 зубцов. шага. На представл. конструкции каждая
из 3 обмоток стат. ОУ1…ОУ3 располож. на 4х полюсах. При поочередн. включ. обмоток ось результир. магн. потока смещ. на 1/3 шага, стремясь занять положение наибольш. магн. проводимости.
Импульсы подаются на обмотки в порядке 1-2-3, 1-3-2, что определяет напр. вращения шаг. двиг-ля. Осн. параметры ШД:
- размер шага – угол поворота вала двиг-ля при подаче на ШД 1 импульса
- Приемистость – наибольшая мгновен. изменяемая частота, отрабатываемая ШД при данной нагрузке без потери импульсов.
- быстродействие - это max частота, отрабатываемая ШД при данной нагрузке и плавном изменении частоты.
- опрокидывающий момент
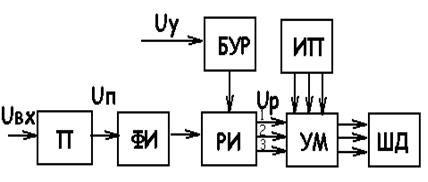
Управлен. ШД осуществл. от стат. преобраз-ля частоты, вырабатывающ. m-фазную сис-му импульсов напряжения.
ЭП с ШД и разомкнутой СУ получ. наибольш. применение.
Типовая структура СУ ШД:
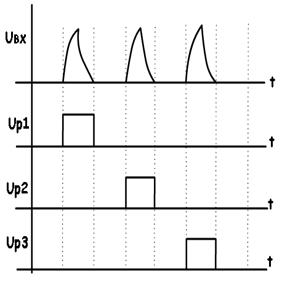
Если на входе непрерывно изменяющ. величина, то используется преобразователь Пнепрервного сигнала в частотно – модулирован. последовательность импульсов напряжения. Входн. импульсы произвольн. формы преобразуются в прямоугольные с помощью формироват. импульсов ФИ. ФИ преобразует унитарный код в фазную систему импульсов напряжений Uр1 – Uр3, которые через усилитель мощности УМ и источник питания ИП подаются на обмотки ШД.
|
|
|
 При поступл. команды на блок управления реверсом БУР последний изменяет алгоритм действия РИ и ШД отрабатывает движение в обратном направлении.
При поступл. команды на блок управления реверсом БУР последний изменяет алгоритм действия РИ и ШД отрабатывает движение в обратном направлении.
Электроприводы с вентильными двигателями.
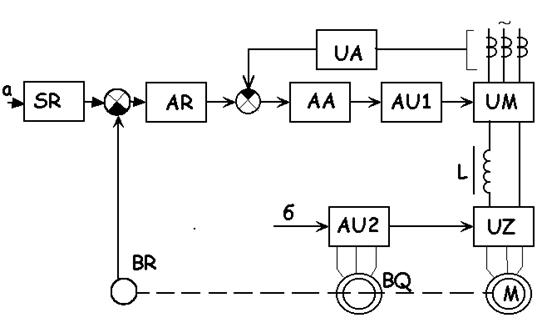
Позволяют получить диапазон регул. скорости 1:20000 при значительно большей простоте и меньших затратах по сравнению с ЭП с АД. ВД – сис-ма, состоящая из бесколлекторного СД, датчика положения ротора, вентильного коммутатора и уст-ва управления.
На статоре – 3хфазн. обмотка, ротор служит возбудителем, который либо получает напряжение пост. тока через кольца и щётки, либо выполнен но пост. магнитах, закрепл. в пазах ротора.
ВК питает обмотки статора, коммутируя ток в соответствии с командами ДПР. Т.о является аналогом щеточного механизма и вращающ. коллектора машины пост. тока. Регулир. скорости вниз от номинальной осущ. путём изменения подводимого к статору напряжения. Кроме того, регулир-ть скорость можно изменением тока в обмотке возбуждения и изменен. угла опережения включения вентилей относит. фазных ЭДС двигателя (вверх от номинальной)
|
|
|
ЭП содерж. преоб-ль с промежуточн. звеном пост. тока UM и инвертор с искусств. коммутац. UZ. Управление инвертором производ. ф-цией положения ротора ЭД М при пом. датч. положения BQ, воздейств. на сис-мууправлен. инвертором AU2.
Сис-маупр-я вып-лемAU1воздейств. на упр. вып-ль UM. Изменением одного из углов а,б или тока возб-я М можно регулировать углов. скор. ВД.
ОС построены при помощи датчиков тока UA и скорости BR. Скорость устанавливается задатчикомSR.
 ЭП с ВД в станках с ЧПУ примен. в мех. подач. Разработан комплектн. ЭП с ВД типа ЭПБ-1. По технико – эконом. показат. ЭП подач с ВД, развивающ. крутящ. моменты от 2 до 40 Н*м, превосходят ЭП с высокомоментн. ЭД, получ. питание от ШИП.
ЭП с ВД в станках с ЧПУ примен. в мех. подач. Разработан комплектн. ЭП с ВД типа ЭПБ-1. По технико – эконом. показат. ЭП подач с ВД, развивающ. крутящ. моменты от 2 до 40 Н*м, превосходят ЭП с высокомоментн. ЭД, получ. питание от ШИП.
 44.Аналог. структ. схема управл. процессом резания
44.Аналог. структ. схема управл. процессом резания
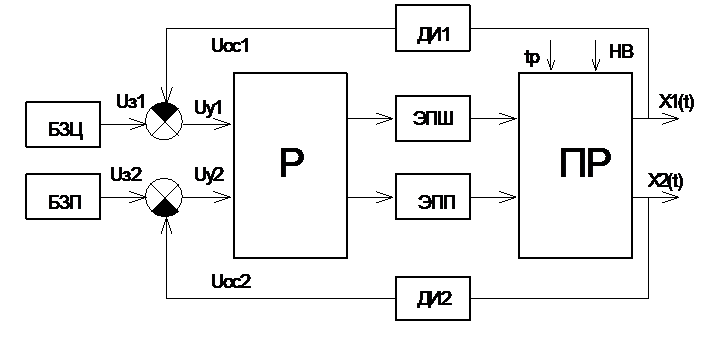
АСУ должна обеспечив. изм-е скор-тиV и подачей S при изм. возмущ. воздейств. (глубины резания tр, НВ-твердости обраб. изделий.), включать. два контура управл.
АСУ ТП стабилиз содержит регулятор Р электроприводов шпинделя ЭПШ и подач ЭПП, воздействующ. на процесс резания ПР и датчики информ. ДИ1,2 об обощенных пар-ах Х1(t), Х2(t).На вход рег. поступ. разность сигналов Uу1=Uз1-Uос1(tp,HB); Uу2=Uз2-Uос2(tp,HB).
Uз1,Uз2 - напряж. задания. от блоков БЗЦ и БЗП. Uос1,2-напряж. сигн. обратн. связей.
|
|
|
tp-глубина резания, НВ-твердость.
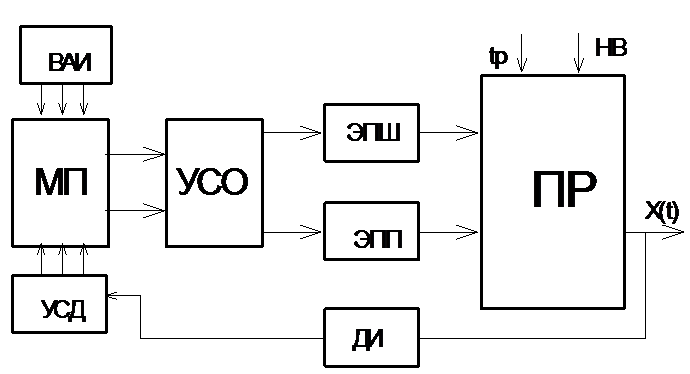 45.Цифро-аналог. структ. схема управл. процессом резания
45.Цифро-аналог. структ. схема управл. процессом резания
АСУ должна обеспечив. изм-е скор-тиV и подачей S при изм. возмущ. воздейств. (глубины резания tр, НВ-твердости обраб. изделий.), включать. два контура управл. ПР- процесс резания.
Информ. о ходе техн. проц. поступ. на микропроц. МП от датчиков информ. ДИ через устр-во связи с датчиками УСД. Внешн. априорн. информ. ВАИ вводится в запомин. устр-во МП, управл. ЭПШ ( шпинделя) и ЭПП(подач) осущ. от МП через устр-во связи и объектом УСО, которые воздейств. на ПР.
Дата добавления: 2018-08-06; просмотров: 299; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!